Potrebbero piacerti anche
- Power Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersDa EverandPower Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersNessuna valutazione finora
- Evolution of Power Electronics Engineering PDFDocumento7 pagineEvolution of Power Electronics Engineering PDFMahesh VadhavaniyaNessuna valutazione finora
- Lec-1 Scope of Power ConvertersDocumento26 pagineLec-1 Scope of Power Convertersjameelahmad100% (1)
- Power ElectronicsDocumento29 paginePower Electronicsgrbavithra100% (1)
- Lecture 1Documento69 pagineLecture 1kaybeall7584Nessuna valutazione finora
- Docs EEEPELNotes2013Documento99 pagineDocs EEEPELNotes2013Mr. Amit Kumar SinghNessuna valutazione finora
- Power ElectronicsDocumento32 paginePower ElectronicsmnamkyNessuna valutazione finora
- EE 303 Introduction 2013Documento49 pagineEE 303 Introduction 2013vepnisxaNessuna valutazione finora
- Syllabus: M.Tech. (Power Electronics &electrical Drives)Documento14 pagineSyllabus: M.Tech. (Power Electronics &electrical Drives)volmomoknuyevme.comNessuna valutazione finora
- EeeDocumento268 pagineEeeNajiruddin ShaikNessuna valutazione finora
- EeeDocumento391 pagineEeeGhulam AbbasNessuna valutazione finora
- Power Electronics: Dr. Abdul MajidDocumento17 paginePower Electronics: Dr. Abdul MajidAdnankhan BangashNessuna valutazione finora
- Power ElectronicsDocumento264 paginePower ElectronicsJayashree C RaoNessuna valutazione finora
- Power Electronic:: Dr. F. Danang Wijaya, ST, MT Lab. TTLDocumento18 paginePower Electronic:: Dr. F. Danang Wijaya, ST, MT Lab. TTLVeby Enandes StalonyNessuna valutazione finora
- Unit 1Documento31 pagineUnit 1bilal alkhNessuna valutazione finora
- UEE001 SyllabusDocumento2 pagineUEE001 SyllabusashNessuna valutazione finora
- Department of Electrical EngineeringIITBDocumento28 pagineDepartment of Electrical EngineeringIITBSuvra PattanayakNessuna valutazione finora
- PENUnit 1Documento72 paginePENUnit 1Naman NamanNessuna valutazione finora
- Power Electronics Unit1Documento92 paginePower Electronics Unit1ashish_rewaNessuna valutazione finora
- Power Electronics Chapter 1 Introduction: Dr. Othman Hassan Assistant Professor SIUDocumento38 paginePower Electronics Chapter 1 Introduction: Dr. Othman Hassan Assistant Professor SIUAwe HughNessuna valutazione finora
- Introduction To Power ElectronicsDocumento9 pagineIntroduction To Power ElectronicsSathiya NathanNessuna valutazione finora
- Introduction To Power ElectronicsDocumento9 pagineIntroduction To Power ElectronicsSathiya NathanNessuna valutazione finora
- Pe IntroductionDocumento31 paginePe IntroductionJunaxic MuxicNessuna valutazione finora
- Power Electronics IntroductionDocumento38 paginePower Electronics IntroductionOmar Bin ShehabNessuna valutazione finora
- Power Electronics NotesDocumento44 paginePower Electronics Notessameekshaa75% (4)
- Power ElectronicsDocumento14 paginePower Electronicsmichael higginsNessuna valutazione finora
- BSC Electronics Syllabus Kerala UniversityDocumento64 pagineBSC Electronics Syllabus Kerala UniversityVarunRaj67% (3)
- Ece-Vii-Power Electronics (10ec73) - Notes PDFDocumento264 pagineEce-Vii-Power Electronics (10ec73) - Notes PDFafzal646100% (3)
- Part 1Documento27 paginePart 1Mustafa AlhumayreNessuna valutazione finora
- Department of Electrical and ElectronicsDocumento99 pagineDepartment of Electrical and ElectronicsMogaka LucasNessuna valutazione finora
- Introduction To Power ElectronicsDocumento29 pagineIntroduction To Power ElectronicsSiddarameshwara HNNessuna valutazione finora
- EEE373 Text Book Prof DR Emin TacerDocumento136 pagineEEE373 Text Book Prof DR Emin TacerTareq SelaaNessuna valutazione finora
- Advanced Power ElectronicsDocumento1 paginaAdvanced Power ElectronicshoangductuanNessuna valutazione finora
- Ies SyllabusDocumento3 pagineIes SyllabusBhaskarReddyVangalaNessuna valutazione finora
- Bose EvaluationDocumento11 pagineBose EvaluationDavid Luviano CruzNessuna valutazione finora
- Power Electronics and DrivesDocumento2 paginePower Electronics and DrivesAlfredo VMNessuna valutazione finora
- Lesson Plan For BEEEDocumento18 pagineLesson Plan For BEEEdineshanand810100% (1)
- Course 2. Basic Electrical Technology (Video Course) Faculty Coordinator(s) : 1Documento32 pagineCourse 2. Basic Electrical Technology (Video Course) Faculty Coordinator(s) : 1Ursap BuddyNessuna valutazione finora
- Power Electronics: Er. Faruk Bin Poyen Dept. of Aeie, Uit, Bu, Burdwan, WB, IndiaDocumento40 paginePower Electronics: Er. Faruk Bin Poyen Dept. of Aeie, Uit, Bu, Burdwan, WB, IndiaTripura PidikitiNessuna valutazione finora
- Ge6252 Beee Syllabus PDFDocumento1 paginaGe6252 Beee Syllabus PDFnaga7389Nessuna valutazione finora
- Introduction To Power Electronics, History & Applications (1), Semiconductor Devices EtcDocumento73 pagineIntroduction To Power Electronics, History & Applications (1), Semiconductor Devices Etckomal phulpotoNessuna valutazione finora
- Lec 1 Introduction To Power ElectronicsDocumento38 pagineLec 1 Introduction To Power ElectronicsAfiqah Zainuddin100% (1)
- AKU EEE SyllabusDocumento19 pagineAKU EEE SyllabusAasim MallickNessuna valutazione finora
- BeeeDocumento3 pagineBeeespan1977Nessuna valutazione finora
- 1.2 Applications of Power ElectronicsDocumento7 pagine1.2 Applications of Power ElectronicsSwamy100% (1)
- Syllabus and Study Guide ELE Category 2Documento4 pagineSyllabus and Study Guide ELE Category 2Shavoy RichardsonNessuna valutazione finora
- PE Lecture 1Documento32 paginePE Lecture 1ahmed el-sayedNessuna valutazione finora
- 01 Power ElectronicsDocumento130 pagine01 Power ElectronicsnainaNessuna valutazione finora
- Concept of Power ElectronicsDocumento23 pagineConcept of Power ElectronicsMuttoju VaishnaviNessuna valutazione finora
- 1-Introduction To Power Electronics-WEEK 1Documento8 pagine1-Introduction To Power Electronics-WEEK 1WAHYUDINNessuna valutazione finora
- BEF 34503 - Chapter 1 1Documento33 pagineBEF 34503 - Chapter 1 1Anonymous sH0bv8ENessuna valutazione finora
- 1 StyearsemisteraDocumento5 pagine1 StyearsemisteraSWAPNIL MISHRANessuna valutazione finora
- Ge2151 Basic Electrical and Electronics Engineering L T P CDocumento1 paginaGe2151 Basic Electrical and Electronics Engineering L T P CKannan Kathiravan100% (1)
- ch1 DC MachineDocumento134 paginech1 DC MachineniteshNessuna valutazione finora
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDa EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlValutazione: 5 su 5 stelle5/5 (1)
- Electrical Engineering Principles for Technicians: The Commonwealth and International Library: Electrical Engineering DivisionDa EverandElectrical Engineering Principles for Technicians: The Commonwealth and International Library: Electrical Engineering DivisionValutazione: 3 su 5 stelle3/5 (4)
- Introduction to Electricity Supply and Regulation in IndiaDa EverandIntroduction to Electricity Supply and Regulation in IndiaNessuna valutazione finora
- CT SensorsDocumento2 pagineCT SensorsPARTHIBAN.BNessuna valutazione finora
- General Precautions - Power ElectronicsDocumento1 paginaGeneral Precautions - Power ElectronicsPARTHIBAN.BNessuna valutazione finora
- Precautions - Power ElectronicsDocumento1 paginaPrecautions - Power ElectronicsPARTHIBAN.BNessuna valutazione finora
- Mathi 1Documento12 pagineMathi 1PARTHIBAN.BNessuna valutazione finora
- 555 and 556 Timer CircuitsDocumento11 pagine555 and 556 Timer CircuitsPARTHIBAN.BNessuna valutazione finora
- AutotransformersDocumento17 pagineAutotransformersBilalNessuna valutazione finora
- Half Controlled Single Phase Rectifier Bridge: With Freewheeling DiodeDocumento4 pagineHalf Controlled Single Phase Rectifier Bridge: With Freewheeling DiodeErasmo Franco SNessuna valutazione finora
- SMB/5218/R: Strategic Business Plan (SBP)Documento5 pagineSMB/5218/R: Strategic Business Plan (SBP)Hernando RomeroNessuna valutazione finora
- EMC Filter Design With RB Common Mode ChokesDocumento22 pagineEMC Filter Design With RB Common Mode Chokeskaem1189Nessuna valutazione finora
- Compare Current Source Inverter (CSI) and Voltage Source Inverter (VSI) - Electrical RevolutionDocumento1 paginaCompare Current Source Inverter (CSI) and Voltage Source Inverter (VSI) - Electrical RevolutionSushil NamoijamNessuna valutazione finora
- 2017 Simulation of Three-Phase Transformerless Online UPS Using MATLAB-SIMULINK-IJAERDV04I0569640 PDFDocumento7 pagine2017 Simulation of Three-Phase Transformerless Online UPS Using MATLAB-SIMULINK-IJAERDV04I0569640 PDFTài Nguyễn Minh NhậtNessuna valutazione finora
- ECE 121 Lecture 2Documento28 pagineECE 121 Lecture 2Bassant AbdelkareemNessuna valutazione finora
- FB Catalogue 2016 72DPI PDFDocumento244 pagineFB Catalogue 2016 72DPI PDFWinai JanNessuna valutazione finora
- Detailed Advertisement Recruitment 2019Documento63 pagineDetailed Advertisement Recruitment 2019ambujsharma08Nessuna valutazione finora
- TriacDocumento13 pagineTriacNaveedNessuna valutazione finora
- Batch 5 VignanDocumento69 pagineBatch 5 VignanLova Kumar 19-329Nessuna valutazione finora
- Chapter 4 DDDDocumento13 pagineChapter 4 DDDRishavNessuna valutazione finora
- Anam LOR PDFDocumento1 paginaAnam LOR PDFJewel MohajanNessuna valutazione finora
- Unit - 1 Power Electronics-1 PDFDocumento92 pagineUnit - 1 Power Electronics-1 PDFramudureddyNessuna valutazione finora
- Diris A60Documento2 pagineDiris A60Gervais BlainsonNessuna valutazione finora
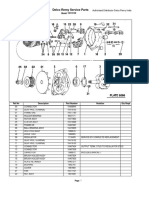
- Delco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaDocumento2 pagineDelco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaWilson AcostaNessuna valutazione finora
- Wiring DiagramDocumento12 pagineWiring DiagramUlises Andres MartinesNessuna valutazione finora
- Lab Guide Lab1 - RectifiersDocumento5 pagineLab Guide Lab1 - RectifiersxDavidx :VNessuna valutazione finora
- Power Electronic Training SystemDocumento82 paginePower Electronic Training SystemZAKARIA AIT OUALINessuna valutazione finora
- Sheet 2 PDFDocumento3 pagineSheet 2 PDFOmar Nashat100% (1)
- What Is An Inverter - Inverter Drive Systems ExplainsDocumento2 pagineWhat Is An Inverter - Inverter Drive Systems ExplainsPrabhjot Singh SahiNessuna valutazione finora
- 12 Pulse Rectifier PDFDocumento8 pagine12 Pulse Rectifier PDFBhanu ThestarNessuna valutazione finora
- PowerManagement TIDocumento129 paginePowerManagement TITuan NgoNessuna valutazione finora
- Third Year Question Bank POWER ELECTRONICSDocumento11 pagineThird Year Question Bank POWER ELECTRONICSvenkatesh_paboluNessuna valutazione finora
- An 7517Documento9 pagineAn 7517MallickarjunaNessuna valutazione finora
- Working Principle of A Ups SystemDocumento3 pagineWorking Principle of A Ups SystemIzi KaroNessuna valutazione finora
- Installation Troubleshooting Capacitors APFCSystemDocumento23 pagineInstallation Troubleshooting Capacitors APFCSystemAshish ParasharNessuna valutazione finora
- Schedule AICTE STTP-1 PDFDocumento1 paginaSchedule AICTE STTP-1 PDFNilesh MahajanNessuna valutazione finora
- Variable Frequency DriveDocumento2 pagineVariable Frequency Driveloreen regtanNessuna valutazione finora