Potrebbero piacerti anche
- Anchor Winches Offshore BS 7464Documento10 pagineAnchor Winches Offshore BS 7464Moheb BotrosNessuna valutazione finora
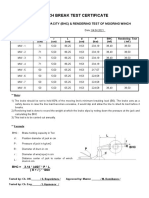
- Winch Brake Test Certificate 1Documento1 paginaWinch Brake Test Certificate 1Владимир МищенкоNessuna valutazione finora
- CLASS NK Part C Hull Construction and EquipmentDocumento737 pagineCLASS NK Part C Hull Construction and EquipmentDian Nafi' Ahmad67% (3)
- NATIONAL IRANIAN TANKER BRAKE TEST DATADocumento2 pagineNATIONAL IRANIAN TANKER BRAKE TEST DATAbehzad parsi100% (1)
- GHMK 3405 Mobile Harbor Crane Maintenance ManualDocumento205 pagineGHMK 3405 Mobile Harbor Crane Maintenance Manualthanh100% (3)
- NATIONAL IRANIAN TANKER BRAKE RENDERING TEST RECORDDocumento2 pagineNATIONAL IRANIAN TANKER BRAKE RENDERING TEST RECORDbehzad parsi100% (2)
- DNV-RU-SHIP Pt.3 Ch.4-3Documento97 pagineDNV-RU-SHIP Pt.3 Ch.4-3Tumul100% (1)
- 732 - 297-975-00 - Anchor-Mooring Equipment - Manual - ALL - Rev01 PDFDocumento227 pagine732 - 297-975-00 - Anchor-Mooring Equipment - Manual - ALL - Rev01 PDFVladimirs ArzeninovsNessuna valutazione finora
- Rec 10 Rev 5Documento28 pagineRec 10 Rev 5Kenan YILDIRIMÇAKARNessuna valutazione finora
- MacGregor Deck Machinery ManualsDocumento231 pagineMacGregor Deck Machinery ManualsVitaliy Romashko0% (1)
- ISO Shipbuilding Standards ListDocumento14 pagineISO Shipbuilding Standards ListGEORGE.K.C100% (2)
- Mooring Winch Tests1Documento7 pagineMooring Winch Tests1RachitNessuna valutazione finora
- Propeller RemovalDocumento10 paginePropeller RemovalMedha Jog Katdare100% (1)
- OCIMF Environment Forces CalculatorDocumento9 pagineOCIMF Environment Forces Calculatorshahjada100% (1)
- Brake Holding Power TestDocumento6 pagineBrake Holding Power TestCaptIsqanNessuna valutazione finora
- Windlass NotesDocumento2 pagineWindlass NotessbdmanNessuna valutazione finora
- IACS Requirements For Mooring, Anchoring and TowingDocumento34 pagineIACS Requirements For Mooring, Anchoring and TowingCapitan PetacaNessuna valutazione finora
- Operation Manual for Framo Submerged Ballast PumpsDocumento13 pagineOperation Manual for Framo Submerged Ballast PumpsKamal වන්නි ஆரச்சி100% (1)
- DNV GL EEXI - What You Need To Know WebDocumento31 pagineDNV GL EEXI - What You Need To Know WebPrabhu Deva100% (1)
- Rocking Test Classification LetterDocumento1 paginaRocking Test Classification Letteremrah_turan100% (1)
- Propeller Shaft AligementDocumento22 paginePropeller Shaft AligementThushara Sampath Dissanayke100% (2)
- H2 Folding Hatch Covers - Original - 30544 PDFDocumento8 pagineH2 Folding Hatch Covers - Original - 30544 PDFGILL2013Nessuna valutazione finora
- Equipment Number Calculation Rules - IRSDocumento5 pagineEquipment Number Calculation Rules - IRSmaaathanNessuna valutazione finora
- Terminal Particulars QuestionnaireDocumento26 pagineTerminal Particulars Questionnairemohd1khairul1anuar100% (1)
- TowingDocumento120 pagineTowingAndreVictorNessuna valutazione finora
- 493 NR - 2015 12Documento64 pagine493 NR - 2015 12Karan DoshiNessuna valutazione finora
- Oil and Gas Processing Systems: Offshore Standard DNV-OS-E201Documento51 pagineOil and Gas Processing Systems: Offshore Standard DNV-OS-E201TIZIANO CIVIDINONessuna valutazione finora
- Winch Brake Holding Capacity TestDocumento2 pagineWinch Brake Holding Capacity TestDenis Mihin83% (6)
- NORSOK R 002 r2 Lifting EquipmentDocumento186 pagineNORSOK R 002 r2 Lifting EquipmentNils Antoine FreundNessuna valutazione finora
- 2009 IMO MODU Code AmendmentsDocumento9 pagine2009 IMO MODU Code AmendmentsPraveen Balachandran100% (1)
- LIFTECH - Container Crane DesignDocumento49 pagineLIFTECH - Container Crane Designaiyubi2100% (1)
- ILO 152 Lifting GearDocumento18 pagineILO 152 Lifting GearADL123100% (1)
- Accommodation Ladder Inspection RequirementsDocumento5 pagineAccommodation Ladder Inspection RequirementsansarALLAAHNessuna valutazione finora
- Designer Checklist For ASD TugDocumento22 pagineDesigner Checklist For ASD TugKalipada SenNessuna valutazione finora
- Vessel Requirements: Op Notice To Shipping No. N-1-2021Documento82 pagineVessel Requirements: Op Notice To Shipping No. N-1-2021Meleti Meleti Meletiou100% (1)
- DMT ATW 211-H19 350 KN Anchor Towing Winch Technical Manual (DWG 10002-2 DMT Order No. 218126) For YN 513520 (MANUAL-I - 4086177 - 1 - A) - 1Documento40 pagineDMT ATW 211-H19 350 KN Anchor Towing Winch Technical Manual (DWG 10002-2 DMT Order No. 218126) For YN 513520 (MANUAL-I - 4086177 - 1 - A) - 1phankhoa83-1100% (1)
- Mooring Winch Brake Capacity Calculation PDFDocumento1 paginaMooring Winch Brake Capacity Calculation PDFvdeviv100% (1)
- Mooring Winch Brake Test ProcedureDocumento3 pagineMooring Winch Brake Test ProcedureKapil Kalra100% (1)
- Casualty Investigation CodeDocumento22 pagineCasualty Investigation CodeAlfi Delfi100% (2)
- Sea FasteningDocumento48 pagineSea FasteningJack Lee Kean Heng100% (1)
- Barge Rules Jan21Documento319 pagineBarge Rules Jan21JohnDoe CCNessuna valutazione finora
- Abs Propulsion Shafting Alignment PDFDocumento37 pagineAbs Propulsion Shafting Alignment PDFCalandrasReyCalandrasreyNessuna valutazione finora
- Hyperbaric EvacuationDocumento45 pagineHyperbaric EvacuationArtur Paixão100% (1)
- Disclosure To Promote The Right To InformationDocumento13 pagineDisclosure To Promote The Right To InformationAbhiNessuna valutazione finora
- Iso 11530 1993Documento8 pagineIso 11530 1993Bao LamNessuna valutazione finora
- Design of Rope Drum and Chain HoistsDocumento19 pagineDesign of Rope Drum and Chain Hoistssuresh_501100% (1)
- Iso 1585.1992 Road Vehicles - Engine TestDocumento4 pagineIso 1585.1992 Road Vehicles - Engine TestSonik MartínNessuna valutazione finora
- IS:11592Documento64 pagineIS:11592Santanu KararNessuna valutazione finora
- AESA Catalogue LV 05-05Documento105 pagineAESA Catalogue LV 05-05joshyvattakkerry100% (2)
- Iso 14397-1 2002Documento17 pagineIso 14397-1 2002Senthamarai Kannan0% (1)
- Iso 3965 - 1990-02Documento6 pagineIso 3965 - 1990-02gkhnNessuna valutazione finora
- Iso 3684 1990Documento8 pagineIso 3684 1990joaquin fuentealba moralesNessuna valutazione finora
- ISO 7919-5:1997(E) Mechanical vibration hydraulic machinesDocumento14 pagineISO 7919-5:1997(E) Mechanical vibration hydraulic machinesAnonymous 1zdRSWskhgNessuna valutazione finora
- IS 14665 Part-4 - 2001Documento40 pagineIS 14665 Part-4 - 2001Vikas Krishnavihar Kalissery100% (1)
- Iso 5199Documento40 pagineIso 5199babis1980100% (1)
- Amclyde M60 Crane SpecificationDocumento22 pagineAmclyde M60 Crane SpecificationWong Yew WeiNessuna valutazione finora
- Is Iso 7919 4 200934Documento20 pagineIs Iso 7919 4 200934LuisAlbertoNessuna valutazione finora
- Disclosure To Promote The Right To InformationDocumento26 pagineDisclosure To Promote The Right To InformationArvindNessuna valutazione finora
- TTMA RP 32 EngDocumento3 pagineTTMA RP 32 Englinh caca huynhNessuna valutazione finora
- Vibration StandardDocumento3 pagineVibration StandardelrajilNessuna valutazione finora
- 510 Closed Exam A, Rev 9Documento21 pagine510 Closed Exam A, Rev 9Pamela Lee100% (1)
- Tank D-2112 PhotoDocumento1 paginaTank D-2112 PhotoosersNessuna valutazione finora
- 2018 AWS certification price listDocumento1 pagina2018 AWS certification price listosersNessuna valutazione finora
- API 510 QuestionsDocumento20 pagineAPI 510 QuestionsPercyAlexanderNessuna valutazione finora
- Tank D-2111 PhotoDocumento1 paginaTank D-2111 PhotoosersNessuna valutazione finora
- Tank X-2568 PhotoDocumento1 paginaTank X-2568 PhotoosersNessuna valutazione finora
- API 510 Study QuestionsDocumento49 pagineAPI 510 Study QuestionsMichael Clapham50% (4)
- API 510 QuestionsDocumento8 pagineAPI 510 QuestionsTAYYAB FAROOQ100% (2)
- API 510 QuestionsDocumento20 pagineAPI 510 QuestionsPercyAlexanderNessuna valutazione finora
- Tank M-28625 PhotoDocumento1 paginaTank M-28625 PhotoosersNessuna valutazione finora
- Check ListDocumento6 pagineCheck ListosersNessuna valutazione finora
- QA - QC Plan For PEP 13-03-2017Documento16 pagineQA - QC Plan For PEP 13-03-2017osersNessuna valutazione finora
- API 510 QuestionsDocumento20 pagineAPI 510 QuestionsPercyAlexanderNessuna valutazione finora
- E 3.1b PDFDocumento20 pagineE 3.1b PDFosersNessuna valutazione finora
- Tank T-41145 PhotoDocumento1 paginaTank T-41145 PhotoosersNessuna valutazione finora
- Tank T-41145 PhotoDocumento1 paginaTank T-41145 PhotoosersNessuna valutazione finora
- 74 06 650 563Documento8 pagine74 06 650 563osersNessuna valutazione finora
- Tank D-2112 PhotoDocumento1 paginaTank D-2112 PhotoosersNessuna valutazione finora
- API Tank DesignDocumento189 pagineAPI Tank DesignDD3NZ91% (11)
- Spec05-Pro-ka-KC151a Contractor Quality Control Dated 10-19-98Documento4 pagineSpec05-Pro-ka-KC151a Contractor Quality Control Dated 10-19-98osersNessuna valutazione finora
- Storage Tank Design Calculations - Seismic Design & Overturning Moment - by Abdel Halim GalalaDocumento10 pagineStorage Tank Design Calculations - Seismic Design & Overturning Moment - by Abdel Halim Galalamarkfgt57% (7)
- QA - QC Plan For PEP 13-03-2017Documento16 pagineQA - QC Plan For PEP 13-03-2017osersNessuna valutazione finora
- 1657-2013 (A1) PDFDocumento7 pagine1657-2013 (A1) PDFosersNessuna valutazione finora
- ITP For Fabrication & Erection of TanksDocumento20 pagineITP For Fabrication & Erection of TanksosersNessuna valutazione finora
- 10) Itp - Tank Fabrication PDFDocumento6 pagine10) Itp - Tank Fabrication PDFAndy Chong100% (5)
- 10) Itp - Tank Fabrication PDFDocumento6 pagine10) Itp - Tank Fabrication PDFAndy Chong100% (5)
- 10) Itp - Tank Fabrication PDFDocumento6 pagine10) Itp - Tank Fabrication PDFAndy Chong100% (5)
- ITP For Fabrication & Erection of TanksDocumento20 pagineITP For Fabrication & Erection of TanksosersNessuna valutazione finora
- Inspection and Test Plan For Storage TankDocumento7 pagineInspection and Test Plan For Storage TankAhmed100% (5)
- 10) Itp - Tank Fabrication PDFDocumento6 pagine10) Itp - Tank Fabrication PDFAndy Chong100% (5)
- Camshaft Test SheetDocumento4 pagineCamshaft Test SheetsughieantoNessuna valutazione finora
- Instrument Resume OIL and GAS.Documento3 pagineInstrument Resume OIL and GAS.RTI PLACEMENT CELLNessuna valutazione finora
- Craig Vaughan CHPTR 07Documento44 pagineCraig Vaughan CHPTR 07Jorge CananeaNessuna valutazione finora
- Indian Standards List As On Jan2009Documento216 pagineIndian Standards List As On Jan2009Vasudeva Pavan VemuriNessuna valutazione finora
- Bellin, E. H. (1984) - The Psychoanalytic Narrative On The Transformational Axis Between Writing and SpeechDocumento15 pagineBellin, E. H. (1984) - The Psychoanalytic Narrative On The Transformational Axis Between Writing and SpeechofanimenochNessuna valutazione finora
- ISCOM HT803 DatasheetDocumento2 pagineISCOM HT803 Datasheetnmc79Nessuna valutazione finora
- Grade 5 Mtap Compilation 2011,2013 2015 2016 2017 Division OralsDocumento5 pagineGrade 5 Mtap Compilation 2011,2013 2015 2016 2017 Division OralsChristine De San JoseNessuna valutazione finora
- Material Balance of Naphtha Hydrotreater and Reformer ReactorsDocumento22 pagineMaterial Balance of Naphtha Hydrotreater and Reformer ReactorsSukirtha GaneshanNessuna valutazione finora
- Superalloy Brochure PDFDocumento16 pagineSuperalloy Brochure PDFDaren NeradNessuna valutazione finora
- Potenciometro 15KDocumento8 paginePotenciometro 15Kra101208Nessuna valutazione finora
- Module 4 - What Is The Required Rate of ReturnDocumento2 pagineModule 4 - What Is The Required Rate of ReturnEthics BAENessuna valutazione finora
- Valve Actuator Data SheetDocumento1 paginaValve Actuator Data SheetRob StorrowNessuna valutazione finora
- WR424GB00DDocumento16 pagineWR424GB00DIgor San Martín PeñalozaNessuna valutazione finora
- Singer Basic Tote Bag: Shopping ListDocumento5 pagineSinger Basic Tote Bag: Shopping ListsacralNessuna valutazione finora
- Design Plan: A Performance Task in GeometryDocumento12 pagineDesign Plan: A Performance Task in GeometryRobert Ryan SantiagoNessuna valutazione finora
- DS Ac0801 GBDocumento20 pagineDS Ac0801 GBHossein Jalali MoghaddamNessuna valutazione finora
- A320 CBT Test 1 PDFDocumento107 pagineA320 CBT Test 1 PDFCesarNessuna valutazione finora
- Max Born, Albert Einstein-The Born-Einstein Letters-Macmillan (1971)Documento132 pagineMax Born, Albert Einstein-The Born-Einstein Letters-Macmillan (1971)Brian O'SullivanNessuna valutazione finora
- Linear Thermal Expansion of Solid Materials With A Vitreous Silica DilatometerDocumento7 pagineLinear Thermal Expansion of Solid Materials With A Vitreous Silica Dilatometerluis_may22Nessuna valutazione finora
- Ain 2016 Pilot Report m600Documento4 pagineAin 2016 Pilot Report m600Antonio Cesar de Sa LeitaoNessuna valutazione finora
- WPS Office 2016Documento22 pagineWPS Office 2016Muhammad Aliff SyukriNessuna valutazione finora
- ID Pengaruh Persistensi Laba Alokasi Pajak Antar Periode Ukuran Perusahaan PertumbuDocumento21 pagineID Pengaruh Persistensi Laba Alokasi Pajak Antar Periode Ukuran Perusahaan PertumbuGheaMarisyaPuteriNessuna valutazione finora
- Sec 2 French ImmersionDocumento1 paginaSec 2 French Immersionapi-506328259Nessuna valutazione finora
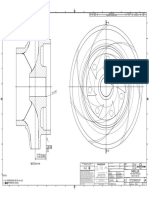
- Impeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLDocumento1 paginaImpeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLSenthilkumar RamalingamNessuna valutazione finora
- 0001981572-JAR Resources in JNLP File Are Not Signed by Same CertificateDocumento13 pagine0001981572-JAR Resources in JNLP File Are Not Signed by Same CertificateAnonymous AZGp1KNessuna valutazione finora
- Challenges of Merchandising in Pridebay Holdings: A Garments Buying HouseDocumento35 pagineChallenges of Merchandising in Pridebay Holdings: A Garments Buying HouseAli AhmadNessuna valutazione finora
- Product - 20V4000G24F 3B FODocumento32 pagineProduct - 20V4000G24F 3B FOmohammed khadrNessuna valutazione finora
- Toyo ML210 thread cutting gear assembly drawingsDocumento12 pagineToyo ML210 thread cutting gear assembly drawingsiril anwarNessuna valutazione finora
- Control Lights with SOU-1 Twilight SwitchDocumento1 paginaControl Lights with SOU-1 Twilight SwitchjsblNessuna valutazione finora
- Database Classification TypesDocumento10 pagineDatabase Classification TypesBhiea Mische MatilacNessuna valutazione finora