Potrebbero piacerti anche
- Cepstrum Analysis and Gearbox Fault Diagnosis - Bruel and Kaer PDFDocumento21 pagineCepstrum Analysis and Gearbox Fault Diagnosis - Bruel and Kaer PDFbackvlackoNessuna valutazione finora
- Advanced Condition MonitoringDocumento4 pagineAdvanced Condition MonitoringmruizbarriosNessuna valutazione finora
- Case Studies in Mechanical Systems and Signal ProcessingDocumento11 pagineCase Studies in Mechanical Systems and Signal Processingtheerapat patkaewNessuna valutazione finora
- 4-20 Ma Vibration Sensor Selection GuideDocumento15 pagine4-20 Ma Vibration Sensor Selection GuidemaaathanNessuna valutazione finora
- Full Spectrums and Other Vibration Two-DimensionaDocumento5 pagineFull Spectrums and Other Vibration Two-DimensionaTecnicas Predictivas SacNessuna valutazione finora
- National Oil Corporation: Rev Date Description Checked ApprovedDocumento21 pagineNational Oil Corporation: Rev Date Description Checked ApprovedRochdi SahliNessuna valutazione finora
- HRSG - NDE Procedure For Pressure Part (China & Korea)Documento502 pagineHRSG - NDE Procedure For Pressure Part (China & Korea)Sreekumar SNessuna valutazione finora
- Velocity Transducers 141626Documento14 pagineVelocity Transducers 141626Vladimir KojicNessuna valutazione finora
- 2173 KG2 3eDocumento2 pagine2173 KG2 3eNistha ChakrabortyNessuna valutazione finora
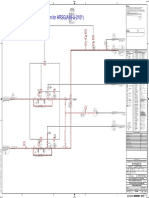
- A10 A Pid Va 718589 203Documento1 paginaA10 A Pid Va 718589 203zhangNessuna valutazione finora
- Calculating The RMS Energy of The FFT PDFDocumento17 pagineCalculating The RMS Energy of The FFT PDFJim Bohni100% (1)
- Properties and Calibration of Laboratory Standard MicrophonesDocumento45 pagineProperties and Calibration of Laboratory Standard MicrophonesWon-young SeoNessuna valutazione finora
- GWR As RLI For Boiler Drum LevelDocumento14 pagineGWR As RLI For Boiler Drum LevelRoger SeaverNessuna valutazione finora
- Detailed of Power Calculation of RBS and Other EquipmentDocumento7 pagineDetailed of Power Calculation of RBS and Other EquipmentWasisNessuna valutazione finora
- Manual Valve (NT2-L1-M-HAL.56-209130 - Rev - 00) PDFDocumento81 pagineManual Valve (NT2-L1-M-HAL.56-209130 - Rev - 00) PDFlele862014Nessuna valutazione finora
- CMXA70 GX Series Microlog Datasheet CM2311 Rev 08-06Documento4 pagineCMXA70 GX Series Microlog Datasheet CM2311 Rev 08-06Marcos DiazNessuna valutazione finora
- Basic Approach of 61400 - 25Documento21 pagineBasic Approach of 61400 - 25Sam Devid Jero DuraisamyNessuna valutazione finora
- Balancing of LP Rotor at Site PDFDocumento5 pagineBalancing of LP Rotor at Site PDFsanjeevchhabra0% (1)
- Attachmnet#8 Rotor Air SystemDocumento3 pagineAttachmnet#8 Rotor Air SystemzhangNessuna valutazione finora
- Calculation For Gas Turbine Exhaust NoxDocumento2 pagineCalculation For Gas Turbine Exhaust Noxkunju1234Nessuna valutazione finora
- Biffi ICON 3000: Electric ActuatorDocumento64 pagineBiffi ICON 3000: Electric Actuatorgdor1973Nessuna valutazione finora
- Eco 100 Wind Turbine PlatformDocumento4 pagineEco 100 Wind Turbine PlatformSofiane HalimiNessuna valutazione finora
- Manual Do Soprador AfsDocumento1.597 pagineManual Do Soprador AfsJoão Paulo Sacramento100% (6)
- GEA31966 Hazrd Areas App Guide - R6Documento16 pagineGEA31966 Hazrd Areas App Guide - R6tjahyo02Nessuna valutazione finora
- Vibration Analysis1Documento68 pagineVibration Analysis1mister pogi0% (1)
- Temporary Control Valve For Steam Blowing Temporary Valve: #1 VHP Drum SH SH HP #2 VHP Drum SH SHDocumento1 paginaTemporary Control Valve For Steam Blowing Temporary Valve: #1 VHP Drum SH SH HP #2 VHP Drum SH SHzhangNessuna valutazione finora
- 48 Case HistoryDocumento17 pagine48 Case HistorySamir Benabdallah100% (1)
- 5.0-111c-Turbine Package Grounding PracticesDocumento10 pagine5.0-111c-Turbine Package Grounding Practiceswili_ab8040Nessuna valutazione finora
- Attachment#6 Burner SystemDocumento3 pagineAttachment#6 Burner SystemzhangNessuna valutazione finora
- Commissioning Completion Certificate: Attachment#4Documento3 pagineCommissioning Completion Certificate: Attachment#4zhangNessuna valutazione finora
- AIr Heater CompareDocumento15 pagineAIr Heater CompareRamalingam PrabhakaranNessuna valutazione finora
- How To Use This Severity Chart: Example Fan 625 Um (25 Mils)Documento2 pagineHow To Use This Severity Chart: Example Fan 625 Um (25 Mils)Aminul Haque SaikiaNessuna valutazione finora
- Asld PresentDocumento50 pagineAsld PresentAakanksha GahlautNessuna valutazione finora
- Rotating Machinery and Signal Processing.Documento142 pagineRotating Machinery and Signal Processing.BobNessuna valutazione finora
- Product: Torsional Vibration Meter - Type 2523Documento4 pagineProduct: Torsional Vibration Meter - Type 2523jhon vargas100% (1)
- GeneratorDocumento42 pagineGeneratorAsim AliNessuna valutazione finora
- 112T2395 D Device Summary AlarmDocumento236 pagine112T2395 D Device Summary AlarmJavier Cruz VargasNessuna valutazione finora
- Axial Thrust Position Sensor PDFDocumento3 pagineAxial Thrust Position Sensor PDFmanteghNessuna valutazione finora
- CCGT Process Control Dec 2010.359152853Documento81 pagineCCGT Process Control Dec 2010.359152853tvskraoNessuna valutazione finora
- Calibration Procedure For BFP-T Turbine Rotor Expansion SensorDocumento9 pagineCalibration Procedure For BFP-T Turbine Rotor Expansion Sensornaresh977977Nessuna valutazione finora
- 1MA178 4e NoiseFigureDocumento31 pagine1MA178 4e NoiseFigureBisuNessuna valutazione finora
- Reference LAC50 DMDocumento41 pagineReference LAC50 DMVivek Singh100% (1)
- Vibration Analyzer and Field Communicator PresentationDocumento30 pagineVibration Analyzer and Field Communicator PresentationJoseph BimoNessuna valutazione finora
- CHP in New York State CHP in New York State CHP in New York State CHP in New York StateDocumento23 pagineCHP in New York State CHP in New York State CHP in New York State CHP in New York StateftriwahyudiNessuna valutazione finora
- Simotics HV M Catalog d84 3 2018 en PDFDocumento360 pagineSimotics HV M Catalog d84 3 2018 en PDFD4 SKL ENessuna valutazione finora
- Electrical Diagnostic Check ListDocumento1 paginaElectrical Diagnostic Check ListSergiSerranoNessuna valutazione finora
- 9, Frequency Response 2 Bode Plot PDFDocumento29 pagine9, Frequency Response 2 Bode Plot PDFwasif karimNessuna valutazione finora
- Type 3560C HardwareDocumento32 pagineType 3560C Hardwarecorentoulf0% (1)
- Coupling Failures in VFD Motor Fan: Torsional VibrationDocumento15 pagineCoupling Failures in VFD Motor Fan: Torsional VibrationCairo Oil Refining Co.100% (1)
- Kamal Industrial Training Report NTPC PDFDocumento26 pagineKamal Industrial Training Report NTPC PDFHimanshu AgrawalNessuna valutazione finora
- Condensate Water System-SKMDocumento37 pagineCondensate Water System-SKMShubham VermaNessuna valutazione finora
- Vibration Analysis of An Alstom Typhoon Gas Turbine Power Plant Related To Iran Oil IndustryDocumento8 pagineVibration Analysis of An Alstom Typhoon Gas Turbine Power Plant Related To Iran Oil IndustryFajar HidayatNessuna valutazione finora
- Masinloc Power Partners Co., LTDDocumento1 paginaMasinloc Power Partners Co., LTDariyakkannaaNessuna valutazione finora
- Case Study Vibration Problem of Steam Condensate Pump-ADocumento39 pagineCase Study Vibration Problem of Steam Condensate Pump-Akirany58100% (1)
- What Is Excitation System - Definition & Types of Excitation System - Circuit GlobeDocumento11 pagineWhat Is Excitation System - Definition & Types of Excitation System - Circuit GlobeSabaMannan123Nessuna valutazione finora
- SCOUT140EX Vibration Data Collector Datasheet 323330 PDFDocumento9 pagineSCOUT140EX Vibration Data Collector Datasheet 323330 PDFShouqi ErmanNessuna valutazione finora
- Noliac Sensors and Tansducers DatasheetDocumento8 pagineNoliac Sensors and Tansducers DatasheetdigvijayNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Av 48WP55 PDFDocumento69 pagineAv 48WP55 PDFthetvman1968100% (1)
- Accelerometer Selection Based On ApplicationsDocumento8 pagineAccelerometer Selection Based On Applicationspatilrushal824Nessuna valutazione finora
- Dot NetDocumento9 pagineDot NetSuruBabuThalupuruNessuna valutazione finora
- Homeassignment 4 (1) (1) - 2Documento3 pagineHomeassignment 4 (1) (1) - 2hellokaun1072Nessuna valutazione finora
- Demag KBK Alu Enclosed Track SystemDocumento2 pagineDemag KBK Alu Enclosed Track SystemMAGSTNessuna valutazione finora
- Bruh I Hate File Handling - CPPDocumento3 pagineBruh I Hate File Handling - CPPJayson AmodiaNessuna valutazione finora
- S406 Specifications For The Supply of Stone PDFDocumento6 pagineS406 Specifications For The Supply of Stone PDFMfanelo MbanjwaNessuna valutazione finora
- Astm - D573.25993Documento6 pagineAstm - D573.25993Bryan de BarrosNessuna valutazione finora
- Valence Bond Theory VBTDocumento32 pagineValence Bond Theory VBTAsif AhnafNessuna valutazione finora
- Product Bulletin N 6: Bearing Assemblies - Shaft VariationsDocumento1 paginaProduct Bulletin N 6: Bearing Assemblies - Shaft VariationsRANAIVOARIMANANANessuna valutazione finora
- Assignment 1Documento2 pagineAssignment 1Alif Bukhari Imran NaimNessuna valutazione finora
- W.R. Klemm (Auth.) - Atoms of Mind - The - Ghost in The Machine - Materializes-Springer Netherlands (2011)Documento371 pagineW.R. Klemm (Auth.) - Atoms of Mind - The - Ghost in The Machine - Materializes-Springer Netherlands (2011)El equipo de Genesis ProjectNessuna valutazione finora
- LCS21 - 35 - Polar PlotsDocumento14 pagineLCS21 - 35 - Polar Plotsgosek16375Nessuna valutazione finora
- Magnetophoresis and Electromagnetophoresis of Microparticles in LiquidsDocumento7 pagineMagnetophoresis and Electromagnetophoresis of Microparticles in Liquids3issazakaNessuna valutazione finora
- Refining Corrosion Technologist NACE-RCT-001: NACE Cathodic Protection Technician (CP 2) Written ExamDocumento16 pagineRefining Corrosion Technologist NACE-RCT-001: NACE Cathodic Protection Technician (CP 2) Written Examshoaib1985100% (1)
- Industrial Engineering KTU M TechDocumento7 pagineIndustrial Engineering KTU M Techsreejan1111Nessuna valutazione finora
- Number Patterns and SequencesDocumento10 pagineNumber Patterns and SequencesMohamed Hawash80% (5)
- ML Observability Build Vs Buy Download Guide 1689038317Documento31 pagineML Observability Build Vs Buy Download Guide 1689038317rastrol7Nessuna valutazione finora
- AWK - WikipediaDocumento1 paginaAWK - WikipediachassisdNessuna valutazione finora
- B 1 1 4 Inplant Fluid FlowDocumento5 pagineB 1 1 4 Inplant Fluid FlowBolívar AmoresNessuna valutazione finora
- IFoA Directory of Actuarial Employers 2016-17-14102016Documento22 pagineIFoA Directory of Actuarial Employers 2016-17-14102016Mian BialNessuna valutazione finora
- Design and Development of An Additive Manufactured Component by Topology OptimisationDocumento6 pagineDesign and Development of An Additive Manufactured Component by Topology OptimisationJon SnowNessuna valutazione finora
- DLT Strand Jack Systems - 2.0 - 600 PDFDocumento24 pagineDLT Strand Jack Systems - 2.0 - 600 PDFganda liftindoNessuna valutazione finora
- Mod 4 Revision Guide 1 Reaction Kinetics AQA A2 ChemistryDocumento5 pagineMod 4 Revision Guide 1 Reaction Kinetics AQA A2 Chemistryviyas07Nessuna valutazione finora
- Leonardo Romero SR High School: Republic of The Philippines Region Xii - Soccsksargen Schools Division Office of CotabatoDocumento4 pagineLeonardo Romero SR High School: Republic of The Philippines Region Xii - Soccsksargen Schools Division Office of CotabatoDulce M. LupaseNessuna valutazione finora
- Practical - Magnetic - Design (Fill Factor) PDFDocumento20 paginePractical - Magnetic - Design (Fill Factor) PDFAhtasham ChaudhryNessuna valutazione finora
- UNIT 10 (Using Modifiers To Describe Hobbies and Interests)Documento2 pagineUNIT 10 (Using Modifiers To Describe Hobbies and Interests)Julian Jaramillo Angel50% (2)
- Development and Experimental Evaluation of Machine Learning Techniques For An Intelligent Hairy Scalp Detection SystemDocumento29 pagineDevelopment and Experimental Evaluation of Machine Learning Techniques For An Intelligent Hairy Scalp Detection SystemBilly GeneNessuna valutazione finora
- Magnetic Field of A SolenoidDocumento5 pagineMagnetic Field of A SolenoidKang Yuan ShingNessuna valutazione finora
- Sample Papers ScienceDocumento199 pagineSample Papers SciencerkkanodiaNessuna valutazione finora
- Low Temperature Plastics - EnsingerDocumento4 pagineLow Temperature Plastics - EnsingerAnonymous r3MoX2ZMTNessuna valutazione finora
- Case Study Class 12 Physics ImportantDocumento5 pagineCase Study Class 12 Physics Importantdivanshu2006yadavNessuna valutazione finora