Potrebbero piacerti anche
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- bpw34 AvrDocumento4 paginebpw34 AvrNedim Avicena AlićNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- ElectronicsDocumento18 pagineElectronicsSrinjay BhattacharyaNessuna valutazione finora
- ED Real LifeDocumento8 pagineED Real Lifejiraf_19Nessuna valutazione finora
- Low Cost LCD Frequency MeterDocumento54 pagineLow Cost LCD Frequency MeterSumit AgarwalNessuna valutazione finora
- Microprocessor Based Controller For A Motor Car Park: Ebegba, D and Anyasi, F.IDocumento7 pagineMicroprocessor Based Controller For A Motor Car Park: Ebegba, D and Anyasi, F.IInternational Organization of Scientific Research (IOSR)Nessuna valutazione finora
- TheftDocumento12 pagineTheftEmeka Nelson OffornedoNessuna valutazione finora
- Adi Design SolutionDocumento7 pagineAdi Design SolutionMark John Servado AgsalogNessuna valutazione finora
- Remake LCR Meter - Elektor Magazine PDFDocumento12 pagineRemake LCR Meter - Elektor Magazine PDFMiguel ClementeNessuna valutazione finora
- Bxe Unit 4Documento12 pagineBxe Unit 4aryaagharkar7Nessuna valutazione finora
- Important Report File Electricity Theft...Documento32 pagineImportant Report File Electricity Theft...Jatinder SainiNessuna valutazione finora
- Thiru 2Documento24 pagineThiru 2sudha rathinamNessuna valutazione finora
- Ethernet Remote PotentiostatDocumento26 pagineEthernet Remote PotentiostatstefanNessuna valutazione finora
- IR Sensor Based Distance Measurement SystemDocumento5 pagineIR Sensor Based Distance Measurement SystemRajkeen ChamanshaikhNessuna valutazione finora
- Week 9 - Data Acquisition Systems (DAQ)Documento35 pagineWeek 9 - Data Acquisition Systems (DAQ)ondoy4925Nessuna valutazione finora
- Obstacle Sensed Switching in Industrial ApplicationsDocumento68 pagineObstacle Sensed Switching in Industrial ApplicationsAbhijit PattnaikNessuna valutazione finora
- What Is The Advantages and Disadvantages of Analog and Digital InstrumentDocumento22 pagineWhat Is The Advantages and Disadvantages of Analog and Digital Instrumentabishek_bhardwa866645% (20)
- Wesleyan FULL PDF - 210516 - 222709-115-118Documento4 pagineWesleyan FULL PDF - 210516 - 222709-115-118Ajaykrishna R.CNessuna valutazione finora
- Procedure - AC Circuits and Signal Modulation - W20Documento6 pagineProcedure - AC Circuits and Signal Modulation - W20ChocoNessuna valutazione finora
- Final SDocumento8 pagineFinal SChetanModiNessuna valutazione finora
- Integrator Circuits: 7.0.1 ReadingDocumento5 pagineIntegrator Circuits: 7.0.1 Readingnaveenkv10_105528408Nessuna valutazione finora
- Table of Content: Digital OhmmeterDocumento23 pagineTable of Content: Digital OhmmeterLow Koon Yee100% (1)
- Practical ElectronicsDocumento107 paginePractical ElectronicsSaeed Ali Shahani100% (2)
- Iot Based Smart Energy Management SystemDocumento11 pagineIot Based Smart Energy Management Systeminnovative VijayawadaNessuna valutazione finora
- In Industrial Process, Speed As A Variable Refers To The ReDocumento71 pagineIn Industrial Process, Speed As A Variable Refers To The Reapi-19786583Nessuna valutazione finora
- C. Damian, C. Zet, I. Enculescu, R. Spohr: Virtual PotentiostatDocumento5 pagineC. Damian, C. Zet, I. Enculescu, R. Spohr: Virtual Potentiostatnajam696Nessuna valutazione finora
- A Remote Electricity Billing SystemDocumento9 pagineA Remote Electricity Billing SystemHemant PatelNessuna valutazione finora
- Project ReportBIIRECTIONAL VISITOR COUNTERDocumento51 pagineProject ReportBIIRECTIONAL VISITOR COUNTERSarvjeet Singh SohalNessuna valutazione finora
- PDF - Development of A Digital Phase Angle MeterDocumento6 paginePDF - Development of A Digital Phase Angle MeterZuriel MontielNessuna valutazione finora
- Smart Audio Amplifier: Josue Zarate V, Enrique Muñoz C, Ruben Diaz CDocumento20 pagineSmart Audio Amplifier: Josue Zarate V, Enrique Muñoz C, Ruben Diaz CArmen Aria DanlyNessuna valutazione finora
- Es1107 Assignment-01Documento6 pagineEs1107 Assignment-01K. BHANU PRAKASH REDDYNessuna valutazione finora
- Applied Science Private UniversityDocumento12 pagineApplied Science Private UniversityRobin OhanyanNessuna valutazione finora
- 2.control of Heavy Electrical Loads Using DTMF SignalsDocumento42 pagine2.control of Heavy Electrical Loads Using DTMF Signalsfotronichs velloreNessuna valutazione finora
- Unit 4 NotesDocumento9 pagineUnit 4 NotesPrathamesh BhavsarNessuna valutazione finora
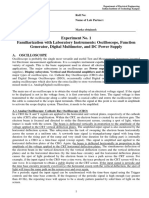
- Experiment No. 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power SupplyDocumento12 pagineExperiment No. 1 Familiarization With Laboratory Instruments: Oscilloscope, Function Generator, Digital Multimeter, and DC Power SupplyMukul ChandraNessuna valutazione finora
- C T I/O P: Hapter Hree RocessingDocumento22 pagineC T I/O P: Hapter Hree RocessingMohamed OmarNessuna valutazione finora
- An 477Documento28 pagineAn 477radaresNessuna valutazione finora
- Arduino Based Underground Cable Fault Detection: Submitted By: AJIT .P. SINGH Faran AnsariDocumento19 pagineArduino Based Underground Cable Fault Detection: Submitted By: AJIT .P. SINGH Faran Ansariq8400Nessuna valutazione finora
- Opto Isolators Lesson 07-17-2012Documento35 pagineOpto Isolators Lesson 07-17-2012whynot05Nessuna valutazione finora
- Dual Slope AdcDocumento5 pagineDual Slope AdcvishvinnyNessuna valutazione finora
- AndegoDocumento11 pagineAndegoFidel OtienoNessuna valutazione finora
- Multipliers ApplicationsDocumento16 pagineMultipliers ApplicationsVictorSNessuna valutazione finora
- Major ProjectDocumento55 pagineMajor ProjectPRIYABRATA PRADHANNessuna valutazione finora
- Second Order Sys - MalDocumento8 pagineSecond Order Sys - Malapi-19787379Nessuna valutazione finora
- Sumber MateriDocumento12 pagineSumber MateriRedy TazwaNessuna valutazione finora
- Prepaid Energy MeterDocumento38 paginePrepaid Energy MeterPriyanka KalburgiNessuna valutazione finora
- Paging Sys ReportDocumento54 paginePaging Sys ReportjassadNessuna valutazione finora
- Experiment SetupDocumento7 pagineExperiment Setupalessandro8265Nessuna valutazione finora
- Analog and Digital Ic'S Short Questions With AnswersDocumento41 pagineAnalog and Digital Ic'S Short Questions With Answerspriya adhavanNessuna valutazione finora
- CCCCCCCCCCCCCCCCCCCCCCCC C CCCCCCCCCCCCCCCCCCCCCCCCCCCCCDocumento10 pagineCCCCCCCCCCCCCCCCCCCCCCCC C CCCCCCCCCCCCCCCCCCCCCCCCCCCCCgopaldxtNessuna valutazione finora
- EI048 Tripping Mechanism of Over Voltage or Under Voltage Systems Using MicrocontrollerDocumento6 pagineEI048 Tripping Mechanism of Over Voltage or Under Voltage Systems Using MicrocontrollerSaravanan ViswakarmaNessuna valutazione finora
- Project Name: Greenhouse Monitoring System Using ArduinoDocumento8 pagineProject Name: Greenhouse Monitoring System Using ArduinoyumnaNessuna valutazione finora
- EI048 Tripping Mechanism of Over Voltage or Under Voltage Systems Using MicrocontrollerDocumento6 pagineEI048 Tripping Mechanism of Over Voltage or Under Voltage Systems Using MicrocontrollerSaravanan ViswakarmaNessuna valutazione finora
- Apparatus:: AIM: Acquire The Knowledge of Output Devices Like CRO and DSO For Observing OutputDocumento5 pagineApparatus:: AIM: Acquire The Knowledge of Output Devices Like CRO and DSO For Observing OutputAdwait BorikarNessuna valutazione finora
- Use A Transistor As A Heater PDFDocumento5 pagineUse A Transistor As A Heater PDFFlorin Marica100% (1)
- Technical Research Paper Microcontroller Based Fault DetectorDocumento8 pagineTechnical Research Paper Microcontroller Based Fault DetectorM S Daniel WesliyNessuna valutazione finora
- Project 2 ElectronicDocumento23 pagineProject 2 ElectronicOmar Eduardo Rios GuzmanNessuna valutazione finora
- Walter Dso ProjectDocumento59 pagineWalter Dso Projectzte00000Nessuna valutazione finora
- 9884 - Duct Temperature Sensor FK-TP - 200 - enDocumento4 pagine9884 - Duct Temperature Sensor FK-TP - 200 - enMinh nhut LưuNessuna valutazione finora
- LG Flatron L1752 L1952 (SM)Documento34 pagineLG Flatron L1752 L1952 (SM)José Edson Silva BezerraNessuna valutazione finora
- Manual DD50Documento34 pagineManual DD50Andre SobralNessuna valutazione finora
- VFD Macro ATV312Documento3 pagineVFD Macro ATV312VanaNessuna valutazione finora
- Marconi S 200kW Transatlant..Documento6 pagineMarconi S 200kW Transatlant..geraldino250Nessuna valutazione finora
- Steca PF166 Refrigerator/Freezer: ApplicationDocumento3 pagineSteca PF166 Refrigerator/Freezer: ApplicationOmar Orlando Rincon FigueroaNessuna valutazione finora
- BVM TechDocumento22 pagineBVM TechbalabhaviniNessuna valutazione finora
- DatasheetDocumento13 pagineDatasheetlizxcanoNessuna valutazione finora
- 45crne PDFDocumento164 pagine45crne PDFElafanNessuna valutazione finora
- Experion Series 8 IO C300 Controller SpecsheetDocumento41 pagineExperion Series 8 IO C300 Controller SpecsheetTÀi VÕNessuna valutazione finora
- Transistor MOSFET - K2761Documento3 pagineTransistor MOSFET - K2761David Jonatan Alayo LlajarunaNessuna valutazione finora
- Commscope CCVVPX308.11R - 2016Documento3 pagineCommscope CCVVPX308.11R - 2016klamar5Nessuna valutazione finora
- 01-356 ESP DTC Table PDFDocumento96 pagine01-356 ESP DTC Table PDFmefisto06cNessuna valutazione finora
- Fault Detection and Fault-Tolerant Control of Interior Permanent-Magnet Motor Drive System For Electric VehicleDocumento6 pagineFault Detection and Fault-Tolerant Control of Interior Permanent-Magnet Motor Drive System For Electric VehicleAnurag MishraNessuna valutazione finora
- Measurement Techniques in The E-Meter LibraryDocumento7 pagineMeasurement Techniques in The E-Meter LibraryNehaoua FaresNessuna valutazione finora
- VS501Z 54481-01 - 97 - ADocumento8 pagineVS501Z 54481-01 - 97 - AanderskrauseNessuna valutazione finora
- Speed Control IM (Edited)Documento37 pagineSpeed Control IM (Edited)مصطفى حمدىNessuna valutazione finora
- Stringing Check List 10C 48 50Documento5 pagineStringing Check List 10C 48 50Prabhakar SvNessuna valutazione finora
- CRO Practical SPTGDocumento5 pagineCRO Practical SPTGdarshanNessuna valutazione finora
- Wideband Dual-Circularly Polarized Antennas Using Aperture-Coupled Stacked Patches and Single-Section Hybrid CouplerDocumento9 pagineWideband Dual-Circularly Polarized Antennas Using Aperture-Coupled Stacked Patches and Single-Section Hybrid Couplerdtvt2006Nessuna valutazione finora
- AC Phase ControlDocumento6 pagineAC Phase ControlRaymond HartonoNessuna valutazione finora
- Procon LDS Installation Manual-R3Documento14 pagineProcon LDS Installation Manual-R3Watchara ThepjanNessuna valutazione finora
- Normas Iec Publicadas PDFDocumento10 pagineNormas Iec Publicadas PDFAnonymous RAk7WT3Nessuna valutazione finora
- 787A - Ficha Técnica - Acelerómetro Propósito General Con Salida LateralDocumento1 pagina787A - Ficha Técnica - Acelerómetro Propósito General Con Salida LateralJhon BaldeonNessuna valutazione finora
- Table of Contents: Revised: 3/21/08Documento68 pagineTable of Contents: Revised: 3/21/08Mario Leonel Torres MartinezNessuna valutazione finora
- On The Simulation of Three Phase Induction Machine PDFDocumento3 pagineOn The Simulation of Three Phase Induction Machine PDFJOHN MINKHANTNessuna valutazione finora
- SC D353Documento168 pagineSC D353Ricardo SidotiNessuna valutazione finora
- Question Bank For Test 2Documento3 pagineQuestion Bank For Test 2api-194677273Nessuna valutazione finora
- T 6 ContentsDocumento2 pagineT 6 ContentsgastronomicaNessuna valutazione finora
- Experiment 09Documento6 pagineExperiment 09Deepan AdakNessuna valutazione finora
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsDa EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsValutazione: 5 su 5 stelle5/5 (1)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxDa EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxValutazione: 4.5 su 5 stelle4.5/5 (67)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsDa EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNessuna valutazione finora
- CCNA Certification Study Guide, Volume 2: Exam 200-301Da EverandCCNA Certification Study Guide, Volume 2: Exam 200-301Nessuna valutazione finora
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringDa EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringValutazione: 5 su 5 stelle5/5 (40)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamDa EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNessuna valutazione finora
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900Da EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900Nessuna valutazione finora
- Open Radio Access Network (O-RAN) Systems Architecture and DesignDa EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNessuna valutazione finora
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionDa EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionValutazione: 5 su 5 stelle5/5 (4)
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityDa EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityValutazione: 5 su 5 stelle5/5 (2)
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationDa EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationValutazione: 5 su 5 stelle5/5 (2)
- Palo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsDa EverandPalo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsNessuna valutazione finora
- Azure Networking: Command Line Mastery From Beginner To ArchitectDa EverandAzure Networking: Command Line Mastery From Beginner To ArchitectNessuna valutazione finora
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNDa EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNValutazione: 5 su 5 stelle5/5 (1)
- ITIL 4 : Drive Stakeholder Value: Reference and study guideDa EverandITIL 4 : Drive Stakeholder Value: Reference and study guideNessuna valutazione finora
- Digital Health: Mobile and Wearable Devices for Participatory Health ApplicationsDa EverandDigital Health: Mobile and Wearable Devices for Participatory Health ApplicationsShabbir Syed-AbdulNessuna valutazione finora
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamDa EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamValutazione: 5 su 5 stelle5/5 (1)