Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- EC160B/180B/210B/240B/290B/360B/460B: Click The Volvo-Logo in The Lower Right Corner To Return To This Menu Main MenuDocumento31 pagineEC160B/180B/210B/240B/290B/360B/460B: Click The Volvo-Logo in The Lower Right Corner To Return To This Menu Main MenuMACHINERY101GEAR97% (71)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Aircraft Design EmpennageDocumento56 pagineAircraft Design EmpennageTeklemichael GhirmayNessuna valutazione finora
- Optis - Ow - LM - Ug - 2014 SP1 PDFDocumento251 pagineOptis - Ow - LM - Ug - 2014 SP1 PDFRaghavNessuna valutazione finora
- Major Cheat Sheet Chemical EngineeringDocumento6 pagineMajor Cheat Sheet Chemical EngineeringtolomontNessuna valutazione finora
- O&M Manual SPAC-08N-10NDocumento46 pagineO&M Manual SPAC-08N-10Nanwar sadat50% (2)
- 30 StabilizersDocumento29 pagine30 StabilizersnjileoNessuna valutazione finora
- Mainframe AbendsDocumento12 pagineMainframe AbendsMadhuriTungal100% (1)
- 015-Method Statement For Painting Works (Building) PDFDocumento21 pagine015-Method Statement For Painting Works (Building) PDFKöksal Patan86% (21)
- Parking BrakeDocumento16 pagineParking BrakeDat100% (1)
- Java ProgramsDocumento60 pagineJava ProgramsbagrechaamitNessuna valutazione finora
- Varec 5000 5010 PDFDocumento10 pagineVarec 5000 5010 PDFEduardo Rafael Lopez LezamaNessuna valutazione finora
- York Ducted Split Ac Yefe 18-48Documento6 pagineYork Ducted Split Ac Yefe 18-48DANISH0% (1)
- PPTDocumento24 paginePPTAbhishek jain80% (5)
- Falcon BMS Keyfile Manual PDFDocumento37 pagineFalcon BMS Keyfile Manual PDFAlessandro MigliardiNessuna valutazione finora
- IRFP240Documento8 pagineIRFP240Hugo JimenezNessuna valutazione finora
- MCQ Books List 1Documento1 paginaMCQ Books List 1BelagaviNessuna valutazione finora
- HFC1508EN - Hi-Force Condensed Catalogue PDFDocumento76 pagineHFC1508EN - Hi-Force Condensed Catalogue PDFVladimir ShepelNessuna valutazione finora
- Cebo Ycc50 ManualDocumento16 pagineCebo Ycc50 ManualAngelevNessuna valutazione finora
- NAME Dendi Panji Nugraha: Career ExperiencesDocumento4 pagineNAME Dendi Panji Nugraha: Career ExperiencesAsep Ricky HerdiansyahNessuna valutazione finora
- Lab 4Documento14 pagineLab 4rhinsaokiNessuna valutazione finora
- Syllabus Compendium For PCN Aerospace Sector ExaminationsDocumento27 pagineSyllabus Compendium For PCN Aerospace Sector ExaminationstomcanNessuna valutazione finora
- 11 - Hashing PDFDocumento24 pagine11 - Hashing PDFKealeboga Duece ThoboloNessuna valutazione finora
- Pulveriser-Power PlantDocumento67 paginePulveriser-Power PlantARUNGREESMANessuna valutazione finora
- Aerobic Respiration in PeasDocumento2 pagineAerobic Respiration in PeasMatt Schiavo100% (1)
- BSS Steel Guide CataloguesDocumento52 pagineBSS Steel Guide Cataloguessaber66Nessuna valutazione finora
- UNNPX206R3Documento4 pagineUNNPX206R3David OlayaNessuna valutazione finora
- M795 Spare PartsDocumento139 pagineM795 Spare Partsวิรัตน์ อัครอภิโภคีNessuna valutazione finora
- 022-000015B NvcaDocumento229 pagine022-000015B NvcaCarlos Terraza OyagaNessuna valutazione finora
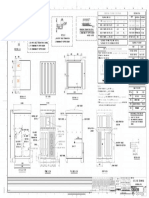
- Pvu-L0880er GaDocumento1 paginaPvu-L0880er GaarunghandwalNessuna valutazione finora
- Iam MicroprojectDocumento2 pagineIam MicroprojectGabber IsbackNessuna valutazione finora