Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Cuckoo Search With Levy FlightDocumento4 pagineCuckoo Search With Levy Flightashikhmd4467Nessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Yogesh Solar CellsDocumento23 pagineYogesh Solar Cellsashikhmd4467Nessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Design of PI Controller in Pitch Control of Wind Turbine: A Comparison of PSO and PS AlgorithmDocumento11 pagineDesign of PI Controller in Pitch Control of Wind Turbine: A Comparison of PSO and PS Algorithmashikhmd4467Nessuna valutazione finora
- 2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1Documento6 pagine2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1ashikhmd4467Nessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- CostCurves PDFDocumento63 pagineCostCurves PDFashikhmd4467Nessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Synthesis of Neural Controller Applied To Flexible AC Transmission SystemsDocumento13 pagineSynthesis of Neural Controller Applied To Flexible AC Transmission Systemsashikhmd4467Nessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Plecs SVMDocumento5 paginePlecs SVMashikhmd4467Nessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Optimal Design of Power System Stabilizer For Multi-Machine Power System Using Differential Evolution AlgorithmDocumento8 pagineOptimal Design of Power System Stabilizer For Multi-Machine Power System Using Differential Evolution Algorithmashikhmd4467Nessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Training Period: Department of Electrical and Electronic EngineeringDocumento1 paginaTraining Period: Department of Electrical and Electronic Engineeringashikhmd4467Nessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Linear QuasiDocumento50 pagineLinear Quasiashikhmd4467Nessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Mark Sheet (Theory) : Mscte 2013-2014 Summer 2 EEE 5201 High Voltage Engineering 3.00 300Documento1 paginaMark Sheet (Theory) : Mscte 2013-2014 Summer 2 EEE 5201 High Voltage Engineering 3.00 300ashikhmd4467Nessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Notice Ragarding Attendance of ITDocumento1 paginaNotice Ragarding Attendance of ITashikhmd4467Nessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Small-Signal Stability of Wind Turbine by Using Direct-Drive PMSG Connected To Power GridDocumento6 pagineSmall-Signal Stability of Wind Turbine by Using Direct-Drive PMSG Connected To Power Gridashikhmd4467Nessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Direct Energy Conversion: Bypassing RotatingDocumento1 paginaDirect Energy Conversion: Bypassing Rotatingashikhmd4467Nessuna valutazione finora
- Introduction To Batteries and Fuelcells ModuleDocumento54 pagineIntroduction To Batteries and Fuelcells Moduleashikhmd4467Nessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Optimal Multiobjective Design of Power System Stabilizers Using Simulated AnnealingDocumento12 pagineOptimal Multiobjective Design of Power System Stabilizers Using Simulated Annealingashikhmd4467Nessuna valutazione finora
- Sample File: A of TheDocumento6 pagineSample File: A of TheMegan KennedyNessuna valutazione finora
- Republic Flour Mills Inc vs. Comm. of Cutoms (39 SCRA 509) Case DigestDocumento3 pagineRepublic Flour Mills Inc vs. Comm. of Cutoms (39 SCRA 509) Case DigestCamelle EscaroNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Skin DseDocumento9 pagineSkin DsePapitas FritasNessuna valutazione finora
- Cambridge IGCSE: BIOLOGY 0610/31Documento20 pagineCambridge IGCSE: BIOLOGY 0610/31Balachandran PalaniandyNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- BSP Training MatrixDocumento2 pagineBSP Training MatrixLeonisa V. BraganzaNessuna valutazione finora
- Complexity. Written Language Is Relatively More Complex Than Spoken Language. ..Documento3 pagineComplexity. Written Language Is Relatively More Complex Than Spoken Language. ..Toddler Channel TVNessuna valutazione finora
- Taxation and LibertyDocumento28 pagineTaxation and LibertyRitu Raj RamanNessuna valutazione finora
- Norman 2017Documento7 pagineNorman 2017Lee HaeunNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
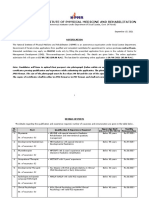
- NIPMR Notification v3Documento3 pagineNIPMR Notification v3maneeshaNessuna valutazione finora
- Baby Brianna Andrew WaltersDocumento14 pagineBaby Brianna Andrew WaltersBaby Brianna50% (2)
- InfoVista Xeus Pro 5 TMR Quick GuideDocumento76 pagineInfoVista Xeus Pro 5 TMR Quick GuideNguyen Dang KhanhNessuna valutazione finora
- Why-Most Investors Are Mostly Wrong Most of The TimeDocumento3 pagineWhy-Most Investors Are Mostly Wrong Most of The TimeBharat SahniNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- ESC Cardiomyopathy ClassificationDocumento7 pagineESC Cardiomyopathy Classificationvalerius83Nessuna valutazione finora
- Percy JacksonDocumento13 paginePercy JacksonDawn Marco0% (2)
- Reflection SogieDocumento11 pagineReflection SogieCHRISTIAN ALLEN S. LOPENANessuna valutazione finora
- Hardy-WeinbergEquilibriumSept2012 002 PDFDocumento6 pagineHardy-WeinbergEquilibriumSept2012 002 PDFGuntur FaturachmanNessuna valutazione finora
- LabDocumento11 pagineLableonora KrasniqiNessuna valutazione finora
- Mehta 2021Documento4 pagineMehta 2021VatokicNessuna valutazione finora
- 211 N. Bacalso Avenue, Cebu City: Competencies in Elderly CareDocumento2 pagine211 N. Bacalso Avenue, Cebu City: Competencies in Elderly CareScsit College of NursingNessuna valutazione finora
- Reviewer in Auditing Problems by Reynaldo Ocampo PDFDocumento1 paginaReviewer in Auditing Problems by Reynaldo Ocampo PDFCarlo BalinoNessuna valutazione finora
- Customer AnalysisDocumento6 pagineCustomer AnalysisLina LambotNessuna valutazione finora
- The Magical Number SevenDocumento3 pagineThe Magical Number SevenfazlayNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Math 10 Module - Q2, WK 8Documento5 pagineMath 10 Module - Q2, WK 8Reygie FabrigaNessuna valutazione finora
- Modbus Manual TD80 PDFDocumento34 pagineModbus Manual TD80 PDFAmar ChavanNessuna valutazione finora
- Mus Culo SkeletalDocumento447 pagineMus Culo SkeletalKristine NicoleNessuna valutazione finora
- Sosa Ernest - Causation PDFDocumento259 pagineSosa Ernest - Causation PDFtri korne penal100% (1)
- PDF Document 2Documento12 paginePDF Document 2Nhey VergaraNessuna valutazione finora
- Rosemarie ManlapazDocumento3 pagineRosemarie ManlapazRonald ManlapazNessuna valutazione finora
- DLL Template MathDocumento3 pagineDLL Template MathVash Mc GregorNessuna valutazione finora
- Hero Found: The Greatest POW Escape of the Vietnam WarDa EverandHero Found: The Greatest POW Escape of the Vietnam WarValutazione: 4 su 5 stelle4/5 (19)
- The End of Craving: Recovering the Lost Wisdom of Eating WellDa EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellValutazione: 4.5 su 5 stelle4.5/5 (82)