Potrebbero piacerti anche
- Multi VerbDocumento4 pagineMulti VerbTommaso MatticchioNessuna valutazione finora
- Principles of Modern RadarDocumento38 paginePrinciples of Modern Radarsevaver67% (3)
- Source Separation and Beamforming: Stephan Weiss, Ian K. Proudler and Fraser K. CouttsDocumento30 pagineSource Separation and Beamforming: Stephan Weiss, Ian K. Proudler and Fraser K. CouttsThànhĐạt NgôNessuna valutazione finora
- 3 NarrowDocumento33 pagine3 Narrowmujtabaiftikhar156Nessuna valutazione finora
- Beam FormingDocumento33 pagineBeam Formingathar naveedNessuna valutazione finora
- EESM539 Part1Documento92 pagineEESM539 Part1ZIQIN PINessuna valutazione finora
- Performance Analysis of Beamforming For Mimo Radar: Progress in Electromagnetics Research, PIER 84, 123-134, 2008Documento12 paginePerformance Analysis of Beamforming For Mimo Radar: Progress in Electromagnetics Research, PIER 84, 123-134, 2008Valerie LaneNessuna valutazione finora
- Chapter 4 - Mobile BasicsDocumento55 pagineChapter 4 - Mobile Basicsn2hj2n100% (1)
- Ch2-ASamplingFeb2020 (Compatibility Mode) PDFDocumento40 pagineCh2-ASamplingFeb2020 (Compatibility Mode) PDFKiên LýNessuna valutazione finora
- 6.003: Signals and Systems May 6, 2010Documento5 pagine6.003: Signals and Systems May 6, 2010Israel SmithNessuna valutazione finora
- Ch2 AnalogSamplingFeb2017Documento40 pagineCh2 AnalogSamplingFeb2017Duong N. KhoaNessuna valutazione finora
- Signals and Systems Laboratory 6:: Fourier Transform and PulsesDocumento9 pagineSignals and Systems Laboratory 6:: Fourier Transform and PulsesKthiha CnNessuna valutazione finora
- Communications Num Eriques I: TNS4 - Cours 1/5Documento32 pagineCommunications Num Eriques I: TNS4 - Cours 1/5jawahir akasiaNessuna valutazione finora
- Course-Summer2022-Nonlocal Lecture13 Numerical WawesDocumento47 pagineCourse-Summer2022-Nonlocal Lecture13 Numerical WawesMIHAI-ADRIAN TUDORNessuna valutazione finora
- Multi ResolutionDocumento28 pagineMulti ResolutionMALAKONDA REDDY BOILLANessuna valutazione finora
- Chapter8 SlidesDocumento46 pagineChapter8 Slideskamon20Nessuna valutazione finora
- Tema 1: Balance de Enlace: Sistemas y Canales de TransmisiónDocumento68 pagineTema 1: Balance de Enlace: Sistemas y Canales de TransmisiónJefferson RomoNessuna valutazione finora
- Review of Discrete-Time Signals and Systems: Henry D. Pfister Based On Notes by Tie Liu February 4, 2019Documento31 pagineReview of Discrete-Time Signals and Systems: Henry D. Pfister Based On Notes by Tie Liu February 4, 2019Jose G. TorresNessuna valutazione finora
- Esla Mod3@Azdocuments - inDocumento29 pagineEsla Mod3@Azdocuments - inGita PatilNessuna valutazione finora
- Finite Element Modeling of Beam Bending VibrationDocumento26 pagineFinite Element Modeling of Beam Bending VibrationrasoolNessuna valutazione finora
- 3F4 Power and Energy Spectral Density: Dr. I. J. WassellDocumento12 pagine3F4 Power and Energy Spectral Density: Dr. I. J. WassellNaeem Ali SajadNessuna valutazione finora
- Intensity in Interference and Diffraction: (X, T) A Sin (Documento4 pagineIntensity in Interference and Diffraction: (X, T) A Sin (Akash GhoshNessuna valutazione finora
- S-T Propagation: Outline: - Path Loss and Fading - Statistical Channel Characterization - Examples - Antenna CorrelationDocumento32 pagineS-T Propagation: Outline: - Path Loss and Fading - Statistical Channel Characterization - Examples - Antenna CorrelationMohammed Abd El HakeemNessuna valutazione finora
- Free VibrationDocumento5 pagineFree VibrationLokesh DandgavalNessuna valutazione finora
- Hecht - Chapter 2Documento44 pagineHecht - Chapter 2JunHyoung KimNessuna valutazione finora
- Signal and System Lecture 16Documento20 pagineSignal and System Lecture 16ali_rehman87Nessuna valutazione finora
- Part 2: Characteristics of A Measurement SystemDocumento5 paginePart 2: Characteristics of A Measurement System123andybNessuna valutazione finora
- Adaptive Control of A Four-Dimensional Memristor-Based Chua's CircuitDocumento13 pagineAdaptive Control of A Four-Dimensional Memristor-Based Chua's CircuitMohammed salah Abd elouahabNessuna valutazione finora
- Tutorial Sheet - 1 (Planar Optical Waveguides) : PYL-791 (Fiber Optics), Ist Semester 2020-2021Documento2 pagineTutorial Sheet - 1 (Planar Optical Waveguides) : PYL-791 (Fiber Optics), Ist Semester 2020-2021deepanshuNessuna valutazione finora
- Lecture 2 - ParametersDocumento32 pagineLecture 2 - ParametersSagar PrateekNessuna valutazione finora
- Adaptive Beam-Forming For Satellite Communication: by Prof. Binay K. Sarkar ISRO Chair ProfessorDocumento50 pagineAdaptive Beam-Forming For Satellite Communication: by Prof. Binay K. Sarkar ISRO Chair ProfessorNisha Kumari100% (1)
- !!en5 Discrete Signals DTFT TZ v06Documento11 pagine!!en5 Discrete Signals DTFT TZ v06Marcela DobreNessuna valutazione finora
- Image Processing Basics: Reference: Digital Image Processing', 2nd Edition, by Rafael Gonzalez. Prentice HallDocumento72 pagineImage Processing Basics: Reference: Digital Image Processing', 2nd Edition, by Rafael Gonzalez. Prentice HallBEN AMARNessuna valutazione finora
- EE 121 - Introduction To Digital Communications Final Exam Practice ProblemsDocumento4 pagineEE 121 - Introduction To Digital Communications Final Exam Practice ProblemsNowshin AlamNessuna valutazione finora
- Solution of Free Undamped Vibration For A SDOF System Support Movement of StructuresDocumento1 paginaSolution of Free Undamped Vibration For A SDOF System Support Movement of StructuresAhmed KhalilNessuna valutazione finora
- Tushar Kant SC21B125 L24 ScribeDocumento5 pagineTushar Kant SC21B125 L24 ScribeUtkarsh UtsavNessuna valutazione finora
- 9 Pam Isi Channels I 0809 PDFDocumento15 pagine9 Pam Isi Channels I 0809 PDFSu KoshNessuna valutazione finora
- Space-Time Adaptive Processing (STAP) in Wireless CommunicationsDocumento9 pagineSpace-Time Adaptive Processing (STAP) in Wireless CommunicationsgurusachinnuNessuna valutazione finora
- Ch2 ASampling2024Documento40 pagineCh2 ASampling2024ansvn2 mathNessuna valutazione finora
- Dual Polarized Phased Array Antenna Simulation Using Optimized FDTD Method With PBCDocumento5 pagineDual Polarized Phased Array Antenna Simulation Using Optimized FDTD Method With PBCShivani GoswamiNessuna valutazione finora
- CEI SD 100 Structural Dynamics LR02newDocumento23 pagineCEI SD 100 Structural Dynamics LR02newSahar Aktham RashedNessuna valutazione finora
- Telecommunications Engineering: Dr. David Tay Room BG434 X 2529 D.tay@latrobe - Edu.auDocumento36 pagineTelecommunications Engineering: Dr. David Tay Room BG434 X 2529 D.tay@latrobe - Edu.auBasit KhanNessuna valutazione finora
- A Basic Introduction To Digital Waveguide Synthesis (For The Technically Inclined)Documento5 pagineA Basic Introduction To Digital Waveguide Synthesis (For The Technically Inclined)lukhaviNessuna valutazione finora
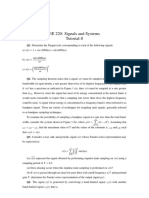
- EE 220: Signals and Systems Tutorial-8Documento3 pagineEE 220: Signals and Systems Tutorial-8Manikanta KrishnamurthyNessuna valutazione finora
- Experiment No. 2Documento4 pagineExperiment No. 2ashish pandeyNessuna valutazione finora
- Magnetic Resonance ImagingDocumento16 pagineMagnetic Resonance Imagingjs18psNessuna valutazione finora
- Guided Revision: Section-I Single Correct Answer Type 9 Q. (3 M (-1) )Documento25 pagineGuided Revision: Section-I Single Correct Answer Type 9 Q. (3 M (-1) )royalNessuna valutazione finora
- hw2 19fDocumento3 paginehw2 19fAmreshAmanNessuna valutazione finora
- FDSP in PDFDocumento87 pagineFDSP in PDFArun JoseNessuna valutazione finora
- Spatial Array Digital Beamforming and Filtering: Tim D. Reichard, M.SDocumento19 pagineSpatial Array Digital Beamforming and Filtering: Tim D. Reichard, M.Sabhi198808Nessuna valutazione finora
- Optimal Receiver For The AWGN Channel: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inDocumento50 pagineOptimal Receiver For The AWGN Channel: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inMOHIT KUMAR DADWALNessuna valutazione finora
- A Simple Description of Near-Field and Far-Field Diffraction PDFDocumento8 pagineA Simple Description of Near-Field and Far-Field Diffraction PDFluo wangNessuna valutazione finora
- ECE 6123 Advanced Signal Processing: 1 FiltersDocumento9 pagineECE 6123 Advanced Signal Processing: 1 FiltersJanaki KNessuna valutazione finora
- L19: Introduction To Digital Communication: (P&S Pp. 7-12, 45-49, 192-194, 290-298, 302-305 C&C Pp. 263-6, 544-54)Documento18 pagineL19: Introduction To Digital Communication: (P&S Pp. 7-12, 45-49, 192-194, 290-298, 302-305 C&C Pp. 263-6, 544-54)Hunter VerneNessuna valutazione finora
- ECE 410 Digital Signal Processing D. Munson University of IllinoisDocumento10 pagineECE 410 Digital Signal Processing D. Munson University of IllinoisFreddy PesantezNessuna valutazione finora
- Telecommunications Engineering: Dr. David Tay Room BG434 X 2529 D.tay@latrobe - Edu.auDocumento21 pagineTelecommunications Engineering: Dr. David Tay Room BG434 X 2529 D.tay@latrobe - Edu.auBasit KhanNessuna valutazione finora
- Numerical Solution To The Van Der Pol Equation With Fractional DampingDocumento5 pagineNumerical Solution To The Van Der Pol Equation With Fractional DampingLakshmi BarathiNessuna valutazione finora
- Thrun Structure From Sound05Documento8 pagineThrun Structure From Sound05recoNessuna valutazione finora
- Pulse Amplitude ModulationDocumento86 paginePulse Amplitude ModulationPraful Jagtap100% (1)
- EITN90 Radar and Remote Sensing Lecture 11: Fundamentals of Pulse Compression WaveformsDocumento60 pagineEITN90 Radar and Remote Sensing Lecture 11: Fundamentals of Pulse Compression Waveformswire010Nessuna valutazione finora
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Da EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Nessuna valutazione finora
- Combined Array Processing and Space-Time CodingDocumento8 pagineCombined Array Processing and Space-Time Codingapi-3826450Nessuna valutazione finora
- MonzingoMiller IntroAdaptiveArrayDocumento74 pagineMonzingoMiller IntroAdaptiveArrayhapsariningrumNessuna valutazione finora
- Advanced Computer ArchitectureDocumento28 pagineAdvanced Computer ArchitectureSameer KhudeNessuna valutazione finora
- Robust Near-Field Narrowband Beamformer Against Steering Angle Mismatch and Distance Error Using Diagonal Loading TechniqueDocumento6 pagineRobust Near-Field Narrowband Beamformer Against Steering Angle Mismatch and Distance Error Using Diagonal Loading TechniqueInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Broadband Array Processing by Shefeng YanDocumento342 pagineBroadband Array Processing by Shefeng YanQuang Huy ĐỗNessuna valutazione finora
- M.tech. (Digital Systems & Signal Processing)Documento41 pagineM.tech. (Digital Systems & Signal Processing)Ali MaaroufNessuna valutazione finora
- Curriculum of Ms in Avionics EngineeringDocumento34 pagineCurriculum of Ms in Avionics EngineeringUfi70Nessuna valutazione finora
- DFDocumento24 pagineDFAurora Viktoria Burealis100% (1)
- Frequency-Wavenumber Array ProcessingDocumento6 pagineFrequency-Wavenumber Array ProcessingFakhrur NoviantoNessuna valutazione finora
- Seismic Arrays: 9.1 OutlineDocumento52 pagineSeismic Arrays: 9.1 OutlineddprosNessuna valutazione finora
- 2011 BoA Content v04Documento134 pagine2011 BoA Content v04paminanNessuna valutazione finora
- Shriram Nandakumar - November15Documento3 pagineShriram Nandakumar - November15api-269884528Nessuna valutazione finora
- Properties and Performance of Extended Target Motion AnalysisDocumento18 pagineProperties and Performance of Extended Target Motion Analysis王大明Nessuna valutazione finora
- High Performance Automotive RadarDocumento13 pagineHigh Performance Automotive RadarJoelMathewKoshyNessuna valutazione finora
- Beam FormingDocumento14 pagineBeam Forminghusnain_inayat8610Nessuna valutazione finora
- PDF PDFDocumento18 paginePDF PDFrealpaladinNessuna valutazione finora
- Slides Array EngDocumento114 pagineSlides Array EngMayssa Rjaibia100% (1)
- Wideband Array Processing Using A Two-Sided Correlation TransformationDocumento13 pagineWideband Array Processing Using A Two-Sided Correlation TransformationSuyash SinghNessuna valutazione finora
- SPE-174865 - Dynamic Water Injection Profiling in Intelligent Wells Using DASDocumento9 pagineSPE-174865 - Dynamic Water Injection Profiling in Intelligent Wells Using DASIsaias Castro ArmendarizNessuna valutazione finora
- Manikas A. - Differential Geometry in Array Processing-ICP (2004)Documento231 pagineManikas A. - Differential Geometry in Array Processing-ICP (2004)Ibrahim OuanzarNessuna valutazione finora
- Good OneDocumento94 pagineGood OneVishal PattanshettiNessuna valutazione finora
- Introduction To Adaptive Arrays MonzingoDocumento560 pagineIntroduction To Adaptive Arrays MonzingoTaeK. LeeNessuna valutazione finora
- MATLAB Phased Array System Toolbox Getting Started Guide. R2020aDocumento28 pagineMATLAB Phased Array System Toolbox Getting Started Guide. R2020adavidlopez2007Nessuna valutazione finora
- Practical Signal Processing Using MATLABDocumento30 paginePractical Signal Processing Using MATLABAvinash Nandakumar100% (2)
- Set Theoretic: ProcessingDocumento6 pagineSet Theoretic: Processingapi-26783388Nessuna valutazione finora
- Bibliography On Cyclostationarity: Erchin Serpedin, Flaviu Panduru, Ilkay Sarı, Georgios B. GiannakisDocumento71 pagineBibliography On Cyclostationarity: Erchin Serpedin, Flaviu Panduru, Ilkay Sarı, Georgios B. Giannakisbobyys990Nessuna valutazione finora
- 2011 Beamforming Regularization Matrix and Inverse Problems Applied To Sound Field Measurement and Extrapolation Using Microphone ArrayDocumento27 pagine2011 Beamforming Regularization Matrix and Inverse Problems Applied To Sound Field Measurement and Extrapolation Using Microphone ArrayPhilippe-Aubert GauthierNessuna valutazione finora
- A N Algorithm For Linearly Constrained Adaptive ProcessingDocumento10 pagineA N Algorithm For Linearly Constrained Adaptive ProcessingMayssa RjaibiaNessuna valutazione finora
- Delay Sum BeamformingDocumento21 pagineDelay Sum BeamforminghaiNessuna valutazione finora