Potrebbero piacerti anche
- Lecture Notes On MechanicsDocumento129 pagineLecture Notes On MechanicsthanassarasNessuna valutazione finora
- Structure: Chapter 1 - Plane Stress TransformationDocumento18 pagineStructure: Chapter 1 - Plane Stress Transformationhasan bishNessuna valutazione finora
- ME2112 - (Part 1) - 2D Stress and StrainDocumento46 pagineME2112 - (Part 1) - 2D Stress and StraindinodanoNessuna valutazione finora
- 132-Stress-Tensor - Rebranded 230617 220737Documento8 pagine132-Stress-Tensor - Rebranded 230617 220737Mohammed KamalNessuna valutazione finora
- Chapter 2Documento49 pagineChapter 2nitingautam1907Nessuna valutazione finora
- Chapter 2-1Documento52 pagineChapter 2-1sakshi.shahani02Nessuna valutazione finora
- Lesson05 17 PDFDocumento20 pagineLesson05 17 PDFMuhammed ShamseerNessuna valutazione finora
- Week 03 Part 1 of 3 - Stresses StrainsDocumento27 pagineWeek 03 Part 1 of 3 - Stresses StrainsPhambra FiverNessuna valutazione finora
- MMT - Ii: Stress Transformation & Principal StressesDocumento40 pagineMMT - Ii: Stress Transformation & Principal StressesAbdul HaadiNessuna valutazione finora
- Lecture Note - Stress Transformation (Equations Method)Documento27 pagineLecture Note - Stress Transformation (Equations Method)Norwahida YusoffNessuna valutazione finora
- Students ME2112 (17-18) - E (Bending Stresses)Documento8 pagineStudents ME2112 (17-18) - E (Bending Stresses)jzhong_7100% (1)
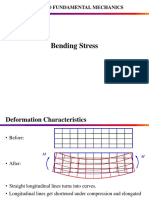
- Bending Stress PDFDocumento26 pagineBending Stress PDFRio ChanNessuna valutazione finora
- ME 311 Machine Design Lecture 2 PDFDocumento16 pagineME 311 Machine Design Lecture 2 PDFASAD ULLAHNessuna valutazione finora
- MEng6302 Lecture 1 Fundamental Concepts ASM 2021Documento17 pagineMEng6302 Lecture 1 Fundamental Concepts ASM 2021KKDhNessuna valutazione finora
- Mechanics of Materials - : F M F F F M M MDocumento36 pagineMechanics of Materials - : F M F F F M M MSathyaNessuna valutazione finora
- SOM All Chapters With TimingsDocumento376 pagineSOM All Chapters With TimingsSUMIT SUMANNessuna valutazione finora
- ME2112 - (Part 1) - 2D Stress and Strain PDFDocumento19 pagineME2112 - (Part 1) - 2D Stress and Strain PDFShang PingNessuna valutazione finora
- Topic 2 Stresses in 3D SolidsDocumento16 pagineTopic 2 Stresses in 3D SolidsSri NiranjanNessuna valutazione finora
- Aero Structures-Basic Elasticity: by Dr. Mahdi Damghani 2022-2023Documento69 pagineAero Structures-Basic Elasticity: by Dr. Mahdi Damghani 2022-2023sami_bangash_1Nessuna valutazione finora
- TOE BasiscsDocumento20 pagineTOE BasiscsYogesh BiyaniNessuna valutazione finora
- An Introduction TO Mechanics of Piping Stress Analysis (Part-II)Documento16 pagineAn Introduction TO Mechanics of Piping Stress Analysis (Part-II)Jaydev ChakrabortyNessuna valutazione finora
- Strength of MaterialsDocumento19 pagineStrength of MaterialsVaibhaw Hirawat100% (1)
- ME-311 Machine Design - Lecture 2Documento16 pagineME-311 Machine Design - Lecture 2Muhammad Zun Nooren BangashNessuna valutazione finora
- ME302: Materials Mechanics: Chap. 1 StressDocumento16 pagineME302: Materials Mechanics: Chap. 1 StressMat MatttNessuna valutazione finora
- Gate Best QuestionsDocumento17 pagineGate Best QuestionsAnmolKumarNessuna valutazione finora
- Week 4 With NoteDocumento36 pagineWeek 4 With NoteAlton S H ChenNessuna valutazione finora
- MEC151 Unified Mechanical Engineering-I: Force-Deformation RelationsDocumento7 pagineMEC151 Unified Mechanical Engineering-I: Force-Deformation RelationsAkshit KapoorNessuna valutazione finora
- MAE 156A Analysis of StressDocumento46 pagineMAE 156A Analysis of StressAudrey TuNessuna valutazione finora
- Stess Transformation EquationsDocumento32 pagineStess Transformation EquationsM Shoaib AkramNessuna valutazione finora
- Chapter 1Documento42 pagineChapter 1jiminNessuna valutazione finora
- ME2112 - (Part 1) - 2D Stress and Strain-L1Documento6 pagineME2112 - (Part 1) - 2D Stress and Strain-L1lalalalaNessuna valutazione finora
- Continuum Mechanics-Lecture-2-20sept16 PDFDocumento63 pagineContinuum Mechanics-Lecture-2-20sept16 PDFGirish DeshmukhNessuna valutazione finora
- 26 FEM2015OddLecture 9A 14th Oct 2019Documento54 pagine26 FEM2015OddLecture 9A 14th Oct 2019Vaibhav SharmaNessuna valutazione finora
- Lectuer 1 Complex Stresses PDFDocumento20 pagineLectuer 1 Complex Stresses PDFadel swar100% (1)
- 5 Shearing Stresses-Part ADocumento23 pagine5 Shearing Stresses-Part AMehmet CiglaNessuna valutazione finora
- Combined Loading: P V My TR VQ A A I J IbDocumento7 pagineCombined Loading: P V My TR VQ A A I J IbAbhishek AroraNessuna valutazione finora
- ME 555 Stress Analysis Unit 1Documento109 pagineME 555 Stress Analysis Unit 1TheoNessuna valutazione finora
- CHP 2 - Stress Analysis (Part I)Documento17 pagineCHP 2 - Stress Analysis (Part I)Mehmet TemizNessuna valutazione finora
- Chapter One (Complex Stresses)Documento37 pagineChapter One (Complex Stresses)edosaNessuna valutazione finora
- Chapter 9 - State of Stress & Strain PDFDocumento11 pagineChapter 9 - State of Stress & Strain PDFĐặng Phi LongNessuna valutazione finora
- Aero Structures-Basic ElasticityDocumento54 pagineAero Structures-Basic ElasticityFaryal BatoolNessuna valutazione finora
- Aero Structures-Basic ElasticityDocumento86 pagineAero Structures-Basic ElasticityFaryal BatoolNessuna valutazione finora
- Topic 7 8 - Week 9 Transformation of Stress and Strain - Princip Stresses Mohr S Circle March 2017 - Students-Lecture 3Documento16 pagineTopic 7 8 - Week 9 Transformation of Stress and Strain - Princip Stresses Mohr S Circle March 2017 - Students-Lecture 3Vinod KumarNessuna valutazione finora
- Lecture 2 StressDocumento25 pagineLecture 2 StressjessNessuna valutazione finora
- Lecture 2 Load and Stress Analysis Principal Stresses Principal StressesDocumento16 pagineLecture 2 Load and Stress Analysis Principal Stresses Principal StressesAbdallah AL-AbbadiNessuna valutazione finora
- ME 555 Stress Analysis Unit 2Documento53 pagineME 555 Stress Analysis Unit 2TheoNessuna valutazione finora
- Shear Force and Bending MomentDocumento17 pagineShear Force and Bending MomentAli HassenNessuna valutazione finora
- Theory of Elasticity - PPT 1Documento53 pagineTheory of Elasticity - PPT 1Karan PatelNessuna valutazione finora
- Untitled 1Documento7 pagineUntitled 1bulitukNessuna valutazione finora
- Transformation Equations For Plane StressesDocumento9 pagineTransformation Equations For Plane StressesFaryal BatoolNessuna valutazione finora
- 6 Shearing StressesDocumento16 pagine6 Shearing StressesMohamed FaragNessuna valutazione finora
- Theory of Elasticity 1 PDFDocumento53 pagineTheory of Elasticity 1 PDFwasim raza jamaniNessuna valutazione finora
- Shearing Stresses PDFDocumento43 pagineShearing Stresses PDFBolWolNessuna valutazione finora
- Lecture 3 Theory of Elasticity and PlasticityDocumento10 pagineLecture 3 Theory of Elasticity and PlasticityVinayak UntwaleNessuna valutazione finora
- KULIAH 3 Tegangan AksialDocumento85 pagineKULIAH 3 Tegangan Aksialandhika pratamaNessuna valutazione finora
- 2 Stress & StrainDocumento53 pagine2 Stress & StrainHadis Hasyimi Miftahul UlumNessuna valutazione finora
- Topic 3BDocumento75 pagineTopic 3BMuhammad Hamza Bin TahirNessuna valutazione finora
- Stress Trans Full PageDocumento39 pagineStress Trans Full PageIfiokobong AkpanNessuna valutazione finora
- ENGR111 Strength & Materials Session 10Documento12 pagineENGR111 Strength & Materials Session 10DanNessuna valutazione finora
- Ce November 2021 Refresher Pantino 4 Sec PDFDocumento4 pagineCe November 2021 Refresher Pantino 4 Sec PDFYoshjordan LambNessuna valutazione finora
- Dy DX: Lny 5 X +LNCDocumento12 pagineDy DX: Lny 5 X +LNCWenaBacxNessuna valutazione finora
- 938 Aurora Boulevard Cubao Quezon City: Technological Institute of The PhilippinesDocumento6 pagine938 Aurora Boulevard Cubao Quezon City: Technological Institute of The PhilippinesLJNessuna valutazione finora
- Session 1 2Documento10 pagineSession 1 2Mix-Kat ZiakaNessuna valutazione finora
- Chapter 12 Fluids AnswersDocumento2 pagineChapter 12 Fluids AnswersKalenaSpinolaNessuna valutazione finora
- Lecture3 PartBDocumento61 pagineLecture3 PartBDiogo CecinNessuna valutazione finora
- Solutions For Anisotropic Materials: EN224: Linear ElasticityDocumento5 pagineSolutions For Anisotropic Materials: EN224: Linear ElasticityM Mohsin RazaNessuna valutazione finora
- MagnetismDocumento11 pagineMagnetismbaymaxNessuna valutazione finora
- Simple Pendulum ExperimentDocumento3 pagineSimple Pendulum ExperimentSubesh ShanmugamNessuna valutazione finora
- Bearing Capacity - 2Documento36 pagineBearing Capacity - 2EICQ/00154/2020 SAMUEL MWANGI RUKWARONessuna valutazione finora
- Mechanical EngineeringDocumento12 pagineMechanical Engineeringanjaiah_19945100% (1)
- M9 Experiment Lab ReportDocumento5 pagineM9 Experiment Lab ReportShageenth Hashmeesh Sandrakumar100% (2)
- Vehicle Dynamics HandbookDocumento110 pagineVehicle Dynamics HandbookFer SalazarNessuna valutazione finora
- Overview of Tuned Liquid Dampers and Possible Ways of Oscillation Damping Properties ImprovementDocumento6 pagineOverview of Tuned Liquid Dampers and Possible Ways of Oscillation Damping Properties Improvementmostafa shahrabiNessuna valutazione finora
- Jee Advance TMHDocumento1.220 pagineJee Advance TMHDevender Baghel100% (6)
- Walter Isaacson - Einstein, His Life and Universe (2007)Documento2 pagineWalter Isaacson - Einstein, His Life and Universe (2007)M.A SamdaniNessuna valutazione finora
- Waves and Sound PacketDocumento16 pagineWaves and Sound PacketKaito EspinaNessuna valutazione finora
- Validation-Triaxial Test With Hardening Soil Model (2015)Documento4 pagineValidation-Triaxial Test With Hardening Soil Model (2015)Geeta JiraliNessuna valutazione finora
- On The Homotopy Analysis Method For Non-Linear Vibration of BeamsDocumento6 pagineOn The Homotopy Analysis Method For Non-Linear Vibration of BeamsRotNessuna valutazione finora
- Engineering Materials and Testing IIDocumento37 pagineEngineering Materials and Testing IILorie Mae BelloNessuna valutazione finora
- Ec. de Martin PDFDocumento17 pagineEc. de Martin PDFMaggyBalcazarNessuna valutazione finora
- Atta2007 PDFDocumento10 pagineAtta2007 PDFSam MeNessuna valutazione finora
- F3 Chapter 7 Energy and PowerDocumento13 pagineF3 Chapter 7 Energy and PowerJue Hazea GoldshopNessuna valutazione finora
- Open Channel Design Channels PDFDocumento27 pagineOpen Channel Design Channels PDFSS100% (1)
- Expectation Values, Wick's Theorem and Normal OrderingDocumento9 pagineExpectation Values, Wick's Theorem and Normal OrderingMrEpsonNessuna valutazione finora
- Essentials of Heat Transfer: Principles, Materials, and Applications, by Massoud KavianyDocumento2 pagineEssentials of Heat Transfer: Principles, Materials, and Applications, by Massoud KavianyHarvin WaraichNessuna valutazione finora
- PHD Application Research Proposal TemplateDocumento2 paginePHD Application Research Proposal TemplateZÄDsNessuna valutazione finora
- Molecular Mechanics 2018Documento3 pagineMolecular Mechanics 2018calebNessuna valutazione finora
- Modul Excellence Fizik 110222Documento30 pagineModul Excellence Fizik 110222MOHAMMAD RAFIQ BIN MUIN MoeNessuna valutazione finora
- Thermodynamics of A Rubber BandDocumento5 pagineThermodynamics of A Rubber BandAlejandra QuintinNessuna valutazione finora