Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Ir DADocumento3 pagineIr DAna_hariprsadNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Uwb TutorialDocumento22 pagineUwb Tutorialmehdicheraghi506Nessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Microprocessor LabmanualDocumento38 pagineMicroprocessor Labmanualna_hariprsad100% (1)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Harvard Architecture Vs Von Neumann ArchitectureDocumento2 pagineHarvard Architecture Vs Von Neumann Architecturena_hariprsadNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Irda and RfidDocumento12 pagineIrda and Rfidna_hariprsadNessuna valutazione finora
- The Chinese Remainder TheoremDocumento9 pagineThe Chinese Remainder Theoremna_hariprsadNessuna valutazione finora
- Electronic Devices Lab MANUALDocumento24 pagineElectronic Devices Lab MANUALna_hariprsadNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- OFDM Wireless LANS, A Theoretical and Practical Guide - Juha HeiskalaDocumento275 pagineOFDM Wireless LANS, A Theoretical and Practical Guide - Juha Heiskalana_hariprsadNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Microprocessor ProgramsDocumento24 pagineMicroprocessor Programsna_hariprsad50% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Ist / Deec / AcsdcDocumento47 pagineIst / Deec / Acsdcna_hariprsadNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- ADVANCED MATHEM WPS OfficeDocumento24 pagineADVANCED MATHEM WPS OfficeBryan NazarroNessuna valutazione finora
- Application HL Oxford CH 5Documento14 pagineApplication HL Oxford CH 5Sun WittawinNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Exercise For Signal and SystemsDocumento16 pagineExercise For Signal and SystemsNikesh BajajNessuna valutazione finora
- A Beginner SpreadsheetDocumento13 pagineA Beginner SpreadsheetAldrin Marquez DyNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Minor New CurrDocumento20 pagineMinor New CurrAnanyaNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Stat NM Quen BankDocumento11 pagineStat NM Quen BankSuresh BiradarNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Jun 30219 ADocumento48 pagineJun 30219 ASatish MopkarNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- KKT PDFDocumento5 pagineKKT PDFTrần Mạnh HùngNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- A Generalized Normal DistributionDocumento11 pagineA Generalized Normal Distributionchang lichangNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Modelos Lineales Generalizados Con Ejemplos en RDocumento573 pagineModelos Lineales Generalizados Con Ejemplos en RJuan Manuel AntónNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Unit 9 RevisionDocumento5 pagineUnit 9 Revisionl wanningNessuna valutazione finora
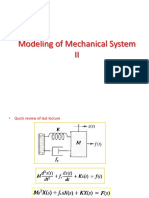
- Modeling of Mechanical System IIDocumento11 pagineModeling of Mechanical System IIshrey saxenaNessuna valutazione finora
- Central Tendency Module - 10Documento64 pagineCentral Tendency Module - 10rueljp5thNessuna valutazione finora
- Nptel: Stochastic Processes - Web CourseDocumento3 pagineNptel: Stochastic Processes - Web CoursebingoNessuna valutazione finora
- Skyline Daa 1Documento8 pagineSkyline Daa 1Boul chandra GaraiNessuna valutazione finora
- 2.2. Teaching - Learning Processes (100) 2.2.1. Describe Processes Followed To Improve Quality of Teaching & LearningDocumento8 pagine2.2. Teaching - Learning Processes (100) 2.2.1. Describe Processes Followed To Improve Quality of Teaching & LearningMalleswara RaoNessuna valutazione finora
- Ann FLDocumento102 pagineAnn FLdpkfatnani05Nessuna valutazione finora
- W11-12 Module 013 Logic Statements and QuantifiersDocumento2 pagineW11-12 Module 013 Logic Statements and QuantifiersJL Santiago BarengNessuna valutazione finora
- Linear LawDocumento4 pagineLinear LawSabariah OsmanNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Pre-Calculus ToDocumento1 paginaPre-Calculus ToAlvin PaboresNessuna valutazione finora
- Introduction To AgdaDocumento46 pagineIntroduction To Agdaglaufan100% (1)
- Decision Modeling Using SpreadsheetDocumento36 pagineDecision Modeling Using SpreadsheetamritaNessuna valutazione finora
- DM Unit 1Documento30 pagineDM Unit 1Rushikesh ShindeNessuna valutazione finora
- M.O.E.M.S Practice Packet 2016 Division E Contest 3 Problems With Solutions and AnswersDocumento3 pagineM.O.E.M.S Practice Packet 2016 Division E Contest 3 Problems With Solutions and AnswersRocket Fire83% (6)
- MTH 212 OdeDocumento18 pagineMTH 212 OdeJames ojochegbNessuna valutazione finora
- ECE 261 Project Presentation 2: Eric Wang Federico Gonzalez Bryan Flemming Jep BarbourDocumento24 pagineECE 261 Project Presentation 2: Eric Wang Federico Gonzalez Bryan Flemming Jep Barbourajith.ganesh2420Nessuna valutazione finora
- IGCSE Math Revision PlanDocumento3 pagineIGCSE Math Revision PlanBảo Đỗ DuyNessuna valutazione finora
- CRT Aptitude PaidDocumento107 pagineCRT Aptitude PaidIndhumathi PrabuNessuna valutazione finora
- MSC Data Science Entrance Test SyllabusDocumento2 pagineMSC Data Science Entrance Test SyllabusJatin BanerjeeNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)