Potrebbero piacerti anche
- Appendix LDocumento25 pagineAppendix LMarcos Paulo MonteiroNessuna valutazione finora
- BFR92/BFR92R: Silicon NPN Planar RF TransistorDocumento6 pagineBFR92/BFR92R: Silicon NPN Planar RF TransistornudufoqiNessuna valutazione finora
- TUGAS ELEKTRONIKA - Kelompok 2Documento11 pagineTUGAS ELEKTRONIKA - Kelompok 2Christine SibaraniNessuna valutazione finora
- Answers To Selected Problems: Appendix IDocumento5 pagineAnswers To Selected Problems: Appendix IMarco PriviteraNessuna valutazione finora
- Chapter 1Documento39 pagineChapter 1ÎQbãl HãikãmNessuna valutazione finora
- ELE315 Midterm 2012 SolutionsDocumento7 pagineELE315 Midterm 2012 SolutionsOsman ZenginNessuna valutazione finora
- Microelectronic Circuit Design 2nd Ed. - Jaeger and Blalock WWW - Solutionmanual.netDocumento22 pagineMicroelectronic Circuit Design 2nd Ed. - Jaeger and Blalock WWW - Solutionmanual.netserhatbNessuna valutazione finora
- Solutions For Microelectronic Circuits 3rd Edition by RashidDocumento29 pagineSolutions For Microelectronic Circuits 3rd Edition by RashidDoron DadiaNessuna valutazione finora
- M Yusuf Rizaldi-206060300111011Documento3 pagineM Yusuf Rizaldi-206060300111011M YUSUF RIZALDYNessuna valutazione finora
- Pspice Simulation of Mosfet Amplifier Configurations: 2.1 ObjectiveDocumento8 paginePspice Simulation of Mosfet Amplifier Configurations: 2.1 ObjectivePreet PatelNessuna valutazione finora
- Workbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsDocumento25 pagineWorkbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsHariPonnanaNessuna valutazione finora
- Microelectronic Circuit Design 5th Edition Jaeger Solutions ManualDocumento25 pagineMicroelectronic Circuit Design 5th Edition Jaeger Solutions Manualserenadinhmzi100% (27)
- BFR90A: Silicon NPN Planar RF TransistorDocumento6 pagineBFR90A: Silicon NPN Planar RF TransistorRaymundo Moran LopezNessuna valutazione finora
- BFR 93 A SMDDocumento10 pagineBFR 93 A SMDcorneliusflavius7132Nessuna valutazione finora
- Project 2Documento8 pagineProject 2marisaliuNessuna valutazione finora
- Design Problem:: Design A Fully Differential Version of Two Stage CMOS Op-Amp With The Following SpecificationsDocumento37 pagineDesign Problem:: Design A Fully Differential Version of Two Stage CMOS Op-Amp With The Following Specificationslearn simplyNessuna valutazione finora
- ElectronicsDocumento190 pagineElectronicsSamshul islamNessuna valutazione finora
- Assignment 01 ReportDocumento13 pagineAssignment 01 ReportSalaudeen IlyasNessuna valutazione finora
- 13Documento32 pagine13arvind pandeyNessuna valutazione finora
- ClassWork-3 (20-43313-1)Documento9 pagineClassWork-3 (20-43313-1)Nondon Roy ShuchiNessuna valutazione finora
- Opamp ReportDocumento38 pagineOpamp ReportMuhammad SaperNessuna valutazione finora
- Answers in AC MachinesDocumento3 pagineAnswers in AC MachinesRonald James DiazNessuna valutazione finora
- Lab 8 ReportDocumento6 pagineLab 8 Reportapi-491291595Nessuna valutazione finora
- BFR 96 TsDocumento9 pagineBFR 96 Tszbhp zNessuna valutazione finora
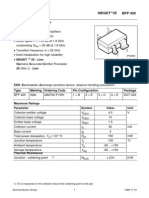
- Sieget-Bfp 420Documento8 pagineSieget-Bfp 420Kieutrang NguyenNessuna valutazione finora
- Cascade and Cascode ConfigurationsDocumento21 pagineCascade and Cascode ConfigurationsPrasit50% (2)
- EEE 241 EEE 241 Analog Electronics 1 Tutorial Tutorial DR Norlaili Mohd NohDocumento42 pagineEEE 241 EEE 241 Analog Electronics 1 Tutorial Tutorial DR Norlaili Mohd NohMd Anwar HossainNessuna valutazione finora
- Vijay Maurya ADE TutorialDocumento4 pagineVijay Maurya ADE TutorialKshitij JaiswalNessuna valutazione finora
- Estacion Experiment 7 ReportDocumento10 pagineEstacion Experiment 7 ReportLawrence Neil PimentelNessuna valutazione finora
- Tda 7297Documento3 pagineTda 7297Faustino ColinaNessuna valutazione finora
- Floyd ED9 Part1 SolutionsDocumento162 pagineFloyd ED9 Part1 SolutionsEngin Yiğit75% (44)
- Analog Electronic Circuits Lab-Module1: Gowra P SDocumento5 pagineAnalog Electronic Circuits Lab-Module1: Gowra P SReddyvari VenugopalNessuna valutazione finora
- Realice La Simulación Del Circuito de La Figura y Complete Los Campos Correspondientes de Las TablasDocumento14 pagineRealice La Simulación Del Circuito de La Figura y Complete Los Campos Correspondientes de Las TablasCarlos javier bellidoNessuna valutazione finora
- EE115 Solution To Prob 3 and 5 Per Unit AnalysisDocumento12 pagineEE115 Solution To Prob 3 and 5 Per Unit AnalysisJoshua Roberto GrutaNessuna valutazione finora
- Didactic DC/DC Buck Converter: With Discrete PID ControllerDocumento14 pagineDidactic DC/DC Buck Converter: With Discrete PID ControllerJuan DetemNessuna valutazione finora
- Marking Scheme Elo S5Documento12 pagineMarking Scheme Elo S5ves vegasNessuna valutazione finora
- BFR91Documento8 pagineBFR91Abel RodriguezNessuna valutazione finora
- Lecture21 Multistage AmplifiersDocumento10 pagineLecture21 Multistage AmplifierscitraumariNessuna valutazione finora
- Answers To Selected Problems: AppendixDocumento12 pagineAnswers To Selected Problems: AppendixalcantararochaNessuna valutazione finora
- Assignment 2 SolutionsDocumento5 pagineAssignment 2 SolutionsYogendra Singh RajpootNessuna valutazione finora
- Ec Manual NewDocumento59 pagineEc Manual NewWasz MujthabaNessuna valutazione finora
- Tut - 01 PDFDocumento13 pagineTut - 01 PDFkarthik nathNessuna valutazione finora
- ECE 402 - Electronic Circuit Analysis and Design CAIMDocumento109 pagineECE 402 - Electronic Circuit Analysis and Design CAIMMark Niño MagdayoNessuna valutazione finora
- Jaks ReporterDocumento13 pagineJaks ReporterMark Lowie CorpuzNessuna valutazione finora
- Vidyalankar Vidyalankar Vidyalankar Vidyalankar: Electronic Devices and Linear CircuitsDocumento15 pagineVidyalankar Vidyalankar Vidyalankar Vidyalankar: Electronic Devices and Linear Circuitssarvajeet294Nessuna valutazione finora
- AEC QuestionsDocumento4 pagineAEC QuestionsVinay MadhavNessuna valutazione finora
- EE42 100 Wb-Lecture18 080513-FDocumento44 pagineEE42 100 Wb-Lecture18 080513-FozanistzNessuna valutazione finora
- Product Profile: NPN 9 GHZ Wideband TransistorDocumento14 pagineProduct Profile: NPN 9 GHZ Wideband TransistorIelupokkiNessuna valutazione finora
- ET Lab Report 10-1Documento6 pagineET Lab Report 10-1idreesaqib12Nessuna valutazione finora
- BFR91A DatssheetDocumento8 pagineBFR91A DatssheetAriel BecerraNessuna valutazione finora
- Dwnload Full Electronics Fundamentals A Systems Approach 1st Edition Floyd Solutions Manual PDFDocumento36 pagineDwnload Full Electronics Fundamentals A Systems Approach 1st Edition Floyd Solutions Manual PDFowenpatelyt39100% (10)
- P2n2222a DDocumento6 pagineP2n2222a Danon_136451958Nessuna valutazione finora
- Model Answer For Second Mid TermDocumento14 pagineModel Answer For Second Mid TermFrank HayagNessuna valutazione finora
- Model Answer For Second Mid TermDocumento14 pagineModel Answer For Second Mid TermFrank HayagNessuna valutazione finora
- Electronics Fundamentals A Systems Approach 1st Edition Floyd Solutions ManualDocumento11 pagineElectronics Fundamentals A Systems Approach 1st Edition Floyd Solutions Manualdannyblackerzawcfyni100% (18)
- Newnes Circuit Calculations Pocket Book: with Computer ProgramsDa EverandNewnes Circuit Calculations Pocket Book: with Computer ProgramsNessuna valutazione finora
- Analog Circuit Techniques: With Digital InterfacingDa EverandAnalog Circuit Techniques: With Digital InterfacingNessuna valutazione finora
- Operational Amplifier Circuits: Analysis and DesignDa EverandOperational Amplifier Circuits: Analysis and DesignValutazione: 4.5 su 5 stelle4.5/5 (2)
- Electricity in Fish Research and Management: Theory and PracticeDa EverandElectricity in Fish Research and Management: Theory and PracticeNessuna valutazione finora
- Almansoori Inspection Services: Lifting Equipment Thorough Examination ReportDocumento3 pagineAlmansoori Inspection Services: Lifting Equipment Thorough Examination ReportMohamed Yasir100% (1)
- Gas Turbine Manual PDFDocumento721 pagineGas Turbine Manual PDFZakki Afifi100% (2)
- Laplace MPNI 1150Documento20 pagineLaplace MPNI 1150mansyur yadi67% (3)
- Workshop Microproject ListDocumento2 pagineWorkshop Microproject ListABDUL KADIR MUZAMMIL HUSAIN KHANNessuna valutazione finora
- BX 3010 (0C)Documento362 pagineBX 3010 (0C)Lâm Hồ Ngọc HãnNessuna valutazione finora
- Street Quality Identification Device (SQUID)Documento6 pagineStreet Quality Identification Device (SQUID)viviolaNessuna valutazione finora
- VW-Audi Airbag Reset Tool User ManualDocumento14 pagineVW-Audi Airbag Reset Tool User ManualgermantronikNessuna valutazione finora
- Lista Comandi Tk1m06Documento3 pagineLista Comandi Tk1m06Shahram SherkatNessuna valutazione finora
- CFRD 05 - BayardoDocumento23 pagineCFRD 05 - BayardodiegofernandodiazsepNessuna valutazione finora
- ADPlaylistEditor3 (Network Version)Documento42 pagineADPlaylistEditor3 (Network Version)Dramane BonkoungouNessuna valutazione finora
- Transformer Design and Optimization A Literature Survey PDFDocumento26 pagineTransformer Design and Optimization A Literature Survey PDFRushikesh MaliNessuna valutazione finora
- Toshiba Satellite L650 12Q Laptop ManualDocumento229 pagineToshiba Satellite L650 12Q Laptop ManualTasos KachpanisNessuna valutazione finora
- Redseer Consulting Report On Vernacular LanguagesDocumento36 pagineRedseer Consulting Report On Vernacular LanguagesMalavika SivagurunathanNessuna valutazione finora
- ArChine-Food-Grade-Lubricants - eDocumento53 pagineArChine-Food-Grade-Lubricants - enghiaNessuna valutazione finora
- DTH Reviews NewDocumento9 pagineDTH Reviews NewPrithi J0% (1)
- DLP Sample Detailed Lesson PlanDocumento4 pagineDLP Sample Detailed Lesson PlanJaydie PalNessuna valutazione finora
- HRS PS Plugin Instruction enDocumento8 pagineHRS PS Plugin Instruction enBogdan CîrlugeaNessuna valutazione finora
- Health Care Facilities and Medical Gas and VacuumDocumento27 pagineHealth Care Facilities and Medical Gas and VacuumStephen TabiarNessuna valutazione finora
- CS4411 Operating Systems Exam 2 Solutions Spring 2019Documento7 pagineCS4411 Operating Systems Exam 2 Solutions Spring 2019DoremonNessuna valutazione finora
- Lesson 3 - Equipment and FacilitiesDocumento15 pagineLesson 3 - Equipment and FacilitiesRishiel Dimple BalonesNessuna valutazione finora
- Measurement of Rn222 Concentrations in The Air of Peshraw & Darbandikhan Tunnels Located in Sulaimani Governorate of Kurdistan Region-Iraq.Documento5 pagineMeasurement of Rn222 Concentrations in The Air of Peshraw & Darbandikhan Tunnels Located in Sulaimani Governorate of Kurdistan Region-Iraq.IJMERNessuna valutazione finora
- Specification For Piping MaterialDocumento9 pagineSpecification For Piping MaterialAgus SupriadiNessuna valutazione finora
- CSC204 - Chapter 3.1Documento30 pagineCSC204 - Chapter 3.1Alif HaiqalNessuna valutazione finora
- Congratulations On The Purchase of Your New Antari Z Series Fog MachineDocumento20 pagineCongratulations On The Purchase of Your New Antari Z Series Fog MachineWalter SeidlNessuna valutazione finora
- Int. J. Miner. Process.: Emin Cafer CilekDocumento10 pagineInt. J. Miner. Process.: Emin Cafer CilekJose Patricio VelardeNessuna valutazione finora
- Simple DistillationDocumento2 pagineSimple DistillationHarvey A. JuicoNessuna valutazione finora
- Mathalino: E N W S G S V V V V V W W W D Γ Γ Γ Γ Γ Γ Γ Γ Ll Pl Li Pi GiDocumento8 pagineMathalino: E N W S G S V V V V V W W W D Γ Γ Γ Γ Γ Γ Γ Γ Ll Pl Li Pi GiLovely Joy ArdanielNessuna valutazione finora
- ColorCells CC784 ProgrammingGuideDocumento20 pagineColorCells CC784 ProgrammingGuideTom SteinhauerNessuna valutazione finora
- FrictionDocumento4 pagineFrictionMuzafar ahmadNessuna valutazione finora
- SJS Cementing-Equipment ENGDocumento44 pagineSJS Cementing-Equipment ENGMustafa Asgerov100% (1)