Potrebbero piacerti anche
- Induction MotorDocumento43 pagineInduction MotorJanine Jade SetiasNessuna valutazione finora
- A New System of Alternating Current Motors and Transformers and Other EssaysDa EverandA New System of Alternating Current Motors and Transformers and Other EssaysValutazione: 5 su 5 stelle5/5 (1)
- A New System of Alternating Current Motors and TransformersDa EverandA New System of Alternating Current Motors and TransformersValutazione: 1 su 5 stelle1/5 (1)
- Stepper MotorDocumento58 pagineStepper Motorjayaweerawgn100% (1)
- Stepper Motors ExplainedDocumento13 pagineStepper Motors ExplainedGurwinder Singh100% (1)
- Design Coordination Checklist Electrical Verfeb282020Documento4 pagineDesign Coordination Checklist Electrical Verfeb282020xe cuôc NguyễnNessuna valutazione finora
- Stepper MotorDocumento18 pagineStepper MotorLasantha Abeykoon67% (3)
- Synchronous and Slip-Ring Rotor Machines CourseDocumento87 pagineSynchronous and Slip-Ring Rotor Machines CourseHaryo Probo100% (1)
- TRANSDUCERDocumento11 pagineTRANSDUCERLucks GonzalesNessuna valutazione finora
- AC PPT Energy Meters and Failure AnalysisDocumento155 pagineAC PPT Energy Meters and Failure AnalysisNHPCNessuna valutazione finora
- Study of a reluctance magnetic gearbox for energy storage system applicationDa EverandStudy of a reluctance magnetic gearbox for energy storage system applicationValutazione: 1 su 5 stelle1/5 (1)
- Smoke Sensor ModuleDocumento54 pagineSmoke Sensor ModuleakashNessuna valutazione finora
- Stepper Motor Theory of OperationDocumento11 pagineStepper Motor Theory of OperationSherif EltoukhiNessuna valutazione finora
- Department of Electronics & Communication Course: Microcontroller Based System Design Course Code: ECE-358Documento8 pagineDepartment of Electronics & Communication Course: Microcontroller Based System Design Course Code: ECE-358Varun SinghNessuna valutazione finora
- Ecd Major Project ReportDocumento16 pagineEcd Major Project ReportKuldip GorNessuna valutazione finora
- Stepper MotorDocumento10 pagineStepper Motorgsudhanta1604Nessuna valutazione finora
- Stepper Motor Operation & C Language Program CodeDocumento16 pagineStepper Motor Operation & C Language Program CodeHendrie TanNessuna valutazione finora
- Unit I (SM) PDFDocumento89 pagineUnit I (SM) PDFshiva sai donthulaNessuna valutazione finora
- Module1.Stepper Motor and Its ControlDocumento79 pagineModule1.Stepper Motor and Its ControlOmkar GuptaNessuna valutazione finora
- Stepper MotorDocumento10 pagineStepper MotorboscoNessuna valutazione finora
- Induction Motor: Stator ConstructionDocumento9 pagineInduction Motor: Stator ConstructionMohamed IbrahemNessuna valutazione finora
- Step Motor Engineer (2002 Catlog)Documento13 pagineStep Motor Engineer (2002 Catlog)engineer86Nessuna valutazione finora
- What Is A Stepper MotorDocumento8 pagineWhat Is A Stepper MotorGnanasekarNessuna valutazione finora
- Stepper MotorDocumento16 pagineStepper MotorpaviliondmNessuna valutazione finora
- Types of Stepper MotorDocumento6 pagineTypes of Stepper MotorFazal Aziz WaliNessuna valutazione finora
- Stepper Motor: From Wikipedia, The Free EncyclopediaDocumento42 pagineStepper Motor: From Wikipedia, The Free EncyclopediaJoeson RosarioNessuna valutazione finora
- Brushless DC MotorDocumento13 pagineBrushless DC MotorYova PrameswariNessuna valutazione finora
- Understanding Induction MotorsDocumento23 pagineUnderstanding Induction Motorssai netNessuna valutazione finora
- Electric DrivesDocumento16 pagineElectric DrivesvigneshNessuna valutazione finora
- Single Phase Induction Motor and Stepper MotorDocumento11 pagineSingle Phase Induction Motor and Stepper MotorManthan deshmukhNessuna valutazione finora
- Understanding Stepper MotorsDocumento115 pagineUnderstanding Stepper MotorsSasi prasadNessuna valutazione finora
- Brushless Motor and ArduinoDocumento8 pagineBrushless Motor and ArduinostellaNessuna valutazione finora
- Variable Reluctance MotorDocumento14 pagineVariable Reluctance MotorgbksnNessuna valutazione finora
- Stepper Motor Construction and AnalysisDocumento17 pagineStepper Motor Construction and AnalysisHadeedAhmedSher100% (3)
- Stepper MotorDocumento25 pagineStepper Motorhemamanikumar100% (1)
- Stepper Motors With ArduinoDocumento19 pagineStepper Motors With Arduinochafic WEISSNessuna valutazione finora
- STEPPER MOTOR GUIDEDocumento10 pagineSTEPPER MOTOR GUIDEMohammed SiddiqueNessuna valutazione finora
- Hybrid and ServomotorsDocumento8 pagineHybrid and ServomotorsShilpa SweetyNessuna valutazione finora
- How Stepper Motors Work: The RotorDocumento3 pagineHow Stepper Motors Work: The RotorAhmedShahNessuna valutazione finora
- Switched Reluctance MotorDocumento12 pagineSwitched Reluctance MotorSUMAN CNessuna valutazione finora
- A Stepper, or Stepping Motor ConvertsDocumento25 pagineA Stepper, or Stepping Motor ConvertsFaizan SaeedNessuna valutazione finora
- EPO640 Electrical Drives: BLDC and Stepper MotorsDocumento36 pagineEPO640 Electrical Drives: BLDC and Stepper MotorsZariz ZakianNessuna valutazione finora
- Unit-1 Stepper MotorDocumento39 pagineUnit-1 Stepper MotorkoundinyaNessuna valutazione finora
- Special Machines: Theory, Modeling, Control and ApplicationsDocumento31 pagineSpecial Machines: Theory, Modeling, Control and ApplicationsRAJA MNessuna valutazione finora
- Stepper Motor AssignmentDocumento12 pagineStepper Motor AssignmentShyamu29Nessuna valutazione finora
- What Is ADocumento10 pagineWhat Is AsahiiiiNessuna valutazione finora
- Get Your Motor RunningDocumento10 pagineGet Your Motor RunningwirantoNessuna valutazione finora
- Construction of SRMDocumento3 pagineConstruction of SRMKartikey PraveenNessuna valutazione finora
- Understanding Induction MotorsDocumento28 pagineUnderstanding Induction MotorsKimsairng CheaNessuna valutazione finora
- Brushless DC Motors: An Introduction to Their Construction, Working Principles and AdvantagesDocumento21 pagineBrushless DC Motors: An Introduction to Their Construction, Working Principles and AdvantagesSRL MECHNessuna valutazione finora
- 3.18 Ac MotorsDocumento25 pagine3.18 Ac Motorsdeleted Yt acc.Nessuna valutazione finora
- Single Phase Induction MotorDocumento22 pagineSingle Phase Induction MotorMubashshir AminNessuna valutazione finora
- Arbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorDocumento12 pagineArbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorEphrem DanielNessuna valutazione finora
- Cylindrical Construction: (A) Outside Rotor, (B) Inside Rotor.cDocumento4 pagineCylindrical Construction: (A) Outside Rotor, (B) Inside Rotor.cChristian Camilo RodriguezNessuna valutazione finora
- 8085 - Lecture - Stepper Motor Interfacing - Prof. RAMDocumento6 pagine8085 - Lecture - Stepper Motor Interfacing - Prof. RAMKumar AnjeetNessuna valutazione finora
- Unit 3 - Study MaterialDocumento8 pagineUnit 3 - Study MaterialHazard JoshiNessuna valutazione finora
- Stepper MotorDocumento9 pagineStepper MotorHasan Mahmood100% (1)
- What Are The Speed Control Method of Induction MotorsDocumento12 pagineWhat Are The Speed Control Method of Induction MotorsRajeev ValunjkarNessuna valutazione finora
- Machine 2Documento19 pagineMachine 2Manvendra Singh ShekhawatNessuna valutazione finora
- Ee 2403 Special Electrical MachinesDocumento21 pagineEe 2403 Special Electrical MachinesSurya KrishnanNessuna valutazione finora
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsDa EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNessuna valutazione finora
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDa EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNessuna valutazione finora
- 08 Face WidthDocumento1 pagina08 Face WidthsolidwormNessuna valutazione finora
- 07 Centre DistanceDocumento1 pagina07 Centre DistancesolidwormNessuna valutazione finora
- 04 Normal ModuleDocumento1 pagina04 Normal ModulesolidwormNessuna valutazione finora
- 06 Helix AngleDocumento1 pagina06 Helix AnglesolidwormNessuna valutazione finora
- Changing Edge Direction: To View The Sense of An EdgeDocumento1 paginaChanging Edge Direction: To View The Sense of An EdgesolidwormNessuna valutazione finora
- Size MMK 40, 50, 65 Tuffing Box Housing: Type HW SDocumento1 paginaSize MMK 40, 50, 65 Tuffing Box Housing: Type HW SsolidwormNessuna valutazione finora
- To Set Axis of Revolution, Flow Direction, and View Rotation LinesDocumento1 paginaTo Set Axis of Revolution, Flow Direction, and View Rotation LinessolidwormNessuna valutazione finora
- Cadtranslator™ User Guide: Translating The Max 5 Case 55Documento1 paginaCadtranslator™ User Guide: Translating The Max 5 Case 55solidwormNessuna valutazione finora
- S Pare PartsDocumento1 paginaS Pare PartssolidwormNessuna valutazione finora
- Recommended: 72 Chapter 8: Performing Sample Case LessonsDocumento1 paginaRecommended: 72 Chapter 8: Performing Sample Case LessonssolidwormNessuna valutazione finora
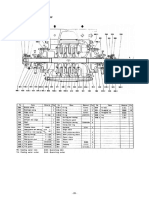
- Sectional Drawings and Lists of Components: Size MMK 40, 50, 65 Stuffing Box Housing: Type NDocumento1 paginaSectional Drawings and Lists of Components: Size MMK 40, 50, 65 Stuffing Box Housing: Type NsolidwormNessuna valutazione finora
- 66 Chapter 8: Performing Sample Case LessonsDocumento1 pagina66 Chapter 8: Performing Sample Case LessonssolidwormNessuna valutazione finora
- Stub shaft details and packing requirementsDocumento1 paginaStub shaft details and packing requirementssolidwormNessuna valutazione finora
- Fluid Properties: Density, Specific Volume, Specific Weight, Specific Gravity, and PressureDocumento1 paginaFluid Properties: Density, Specific Volume, Specific Weight, Specific Gravity, and PressuresolidwormNessuna valutazione finora
- Fluid Statics: Manometers and Pressure MeasurementsDocumento1 paginaFluid Statics: Manometers and Pressure MeasurementssolidwormNessuna valutazione finora
- And Liquid Viscosity: Stress ZDocumento1 paginaAnd Liquid Viscosity: Stress ZsolidwormNessuna valutazione finora
- Personal Computer) : Includes: Drop Box, The Cloud, and Any Other Site Off of Your Personal Computer)Documento6 paginePersonal Computer) : Includes: Drop Box, The Cloud, and Any Other Site Off of Your Personal Computer)IAmDanaNessuna valutazione finora
- 4.2.3. Re-Assembly of Pumps With End Suction NozzleDocumento2 pagine4.2.3. Re-Assembly of Pumps With End Suction NozzlesolidwormNessuna valutazione finora
- 3Documento7 pagine3solidwormNessuna valutazione finora
- Fluids 5: Buoyancy and Continuity EquationDocumento1 paginaFluids 5: Buoyancy and Continuity EquationsolidwormNessuna valutazione finora
- Bhabani P.Mohanty Fluid Engineering DevelopmentDocumento1 paginaBhabani P.Mohanty Fluid Engineering DevelopmentsolidwormNessuna valutazione finora
- VibrationDocumento2 pagineVibrationsolidwormNessuna valutazione finora
- Test loop configurationsDocumento1 paginaTest loop configurationssolidwormNessuna valutazione finora
- 5Documento7 pagine5solidwormNessuna valutazione finora
- 2Documento7 pagine2solidwormNessuna valutazione finora
- Essentials of Turbo Machinery in CFD: Ideen SadrehaghighiDocumento9 pagineEssentials of Turbo Machinery in CFD: Ideen SadrehaghighisolidwormNessuna valutazione finora
- 1Documento7 pagine1solidwormNessuna valutazione finora
- General Requirements:: 1062 16 Pump TestingDocumento1 paginaGeneral Requirements:: 1062 16 Pump TestingsolidwormNessuna valutazione finora
- WrapupDocumento24 pagineWrapupsolidwormNessuna valutazione finora
- Near Net ShapeDocumento30 pagineNear Net ShapesolidwormNessuna valutazione finora
- Maxtena Product Catalog 2015 LowDocumento44 pagineMaxtena Product Catalog 2015 Lowbek_marsNessuna valutazione finora
- NX-series PROFINET® Coupler Unit NX-PNCDocumento15 pagineNX-series PROFINET® Coupler Unit NX-PNCNH KimNessuna valutazione finora
- Microchip TechnologyDocumento3 pagineMicrochip TechnologyMohammad Ali0% (2)
- Install VoiBridge VoIP-to-GSM GatewayDocumento36 pagineInstall VoiBridge VoIP-to-GSM GatewayFitim IsmailiNessuna valutazione finora
- Timer/counter: The AVR Microcontroller and Embedded Systems Using Assembly and CDocumento41 pagineTimer/counter: The AVR Microcontroller and Embedded Systems Using Assembly and CAbo Shaker HaboudalNessuna valutazione finora
- DTC Reset 2007 HondaDocumento2 pagineDTC Reset 2007 HondaMas PoerNessuna valutazione finora
- Clap SwitchDocumento13 pagineClap Switchbing100% (2)
- APP 751A: SEL-751A Feeder Protection RelayDocumento5 pagineAPP 751A: SEL-751A Feeder Protection RelayBouazzaNessuna valutazione finora
- Inverter NmosDocumento124 pagineInverter Nmosapoorva10393Nessuna valutazione finora
- AT-1110 v3Documento4 pagineAT-1110 v3IvanNessuna valutazione finora
- Solved Exercises of Power PDFDocumento41 pagineSolved Exercises of Power PDFJhonn CanazaNessuna valutazione finora
- Passive and Active DC Breakers in Three Gorges-Changzhou HVDC ProjectDocumento5 paginePassive and Active DC Breakers in Three Gorges-Changzhou HVDC ProjectdesignssdNessuna valutazione finora
- Variable Speed AC Motor Drives Installation ManualDocumento47 pagineVariable Speed AC Motor Drives Installation ManualWalther Ernesto Molina DominguezNessuna valutazione finora
- 144 CELL 335-345W 17.4%: Multicrystalline ModuleDocumento2 pagine144 CELL 335-345W 17.4%: Multicrystalline ModuleUlisesGómezNessuna valutazione finora
- Baldor-Reliance AC & DC Motor Installation & MaintenanceDocumento4 pagineBaldor-Reliance AC & DC Motor Installation & MaintenanceAriawan HasnanNessuna valutazione finora
- CV - Alberto Pérez González - EngDocumento2 pagineCV - Alberto Pérez González - EngAlberto Pérez GonzálezNessuna valutazione finora
- SIL3 24/220Vdc/Vac Transistor-Out Detector: Technical DataDocumento2 pagineSIL3 24/220Vdc/Vac Transistor-Out Detector: Technical DataMohamed OmarNessuna valutazione finora
- Parts of A Computer System Unit (Components)Documento31 pagineParts of A Computer System Unit (Components)Anonymous PcPkRpAKD5Nessuna valutazione finora
- CAPE 2014 Unit 1 Computer Science P2Documento8 pagineCAPE 2014 Unit 1 Computer Science P2dnitehawk qNessuna valutazione finora
- BAS I&M GuideDocumento90 pagineBAS I&M GuideGreg WilliamsNessuna valutazione finora
- 2021 SSN Combo Spa 28462 Control Base Repair GuideDocumento46 pagine2021 SSN Combo Spa 28462 Control Base Repair Guidekawon871Nessuna valutazione finora
- Condition Monitoring Methods, Failure Identification and Analysis For Induction MachinesDocumento8 pagineCondition Monitoring Methods, Failure Identification and Analysis For Induction MachinesRamya DeviNessuna valutazione finora
- Magnetic Sensing in Washing Machines: Application NoteDocumento4 pagineMagnetic Sensing in Washing Machines: Application NoteMuhamad Fahri RamdaniNessuna valutazione finora
- Jadual Peperiksaan Akhir Semester Ii Sesi Akademik 2020/2021 Bagi Program Ijazah Sarjana Muda Dan Diploma (Draf 1)Documento127 pagineJadual Peperiksaan Akhir Semester Ii Sesi Akademik 2020/2021 Bagi Program Ijazah Sarjana Muda Dan Diploma (Draf 1)Amirul AdamNessuna valutazione finora
- Introduction To Encoding and DecodingDocumento13 pagineIntroduction To Encoding and DecodingSusmitha Cherukuri0% (1)
- RGB Line FollowerDocumento5 pagineRGB Line FollowerTbotics EducationNessuna valutazione finora
- NHB GV30 GV40 TRB 0.2Documento365 pagineNHB GV30 GV40 TRB 0.2JORGE IVAN ALCALA ZAPATANessuna valutazione finora