Potrebbero piacerti anche
- Odm Gestao Municipal30526Documento88 pagineOdm Gestao Municipal30526James OliverNessuna valutazione finora
- Aula8 ManualDimensionamentoDER SPDocumento53 pagineAula8 ManualDimensionamentoDER SPMarcelo Alberto RosaNessuna valutazione finora
- LAJESDocumento30 pagineLAJESJames OliverNessuna valutazione finora
- Modelo Inclusao Simples NacionalDocumento1 paginaModelo Inclusao Simples NacionalJulio Cesar SouzaNessuna valutazione finora
- GestaltDocumento10 pagineGestaltJames OliverNessuna valutazione finora
- Web Reforço Físico Química Dos AlimentosDocumento9 pagineWeb Reforço Físico Química Dos AlimentosJames OliverNessuna valutazione finora
- ForroDocumento6 pagineForroJames OliverNessuna valutazione finora
- NúmerosDocumento12 pagineNúmerosNOIVODALAGOANessuna valutazione finora
- Marketing Und 01 e 02Documento104 pagineMarketing Und 01 e 02James OliverNessuna valutazione finora
- Escadas Rolantes (ELIAS) 2.1. Introdução 2.2. Tipos de Escadas RolantesDocumento2 pagineEscadas Rolantes (ELIAS) 2.1. Introdução 2.2. Tipos de Escadas RolantesJames OliverNessuna valutazione finora
- Declaração de enquadramento MEDocumento1 paginaDeclaração de enquadramento MEJames OliverNessuna valutazione finora
- Czerny TabelasDocumento10 pagineCzerny TabelashpartegmailNessuna valutazione finora
- Aula 4 - Estresse e Manejo Pré-Abate Na Qualidade Da Carne ZAZ0073Documento19 pagineAula 4 - Estresse e Manejo Pré-Abate Na Qualidade Da Carne ZAZ0073James OliverNessuna valutazione finora
- A Teoria Da Empresa No Novo Código Civil E A Interpretação Do Art. 966: Os Grandes Escritórios de Advocacia Deverão Ter Registro Na Junta Comercial?Documento7 pagineA Teoria Da Empresa No Novo Código Civil E A Interpretação Do Art. 966: Os Grandes Escritórios de Advocacia Deverão Ter Registro Na Junta Comercial?James OliverNessuna valutazione finora
- PênfigoDocumento4 paginePênfigoJames OliverNessuna valutazione finora
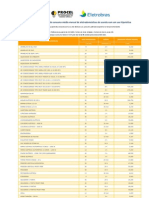
- Consumo médio de eletrodomésticosDocumento2 pagineConsumo médio de eletrodomésticosskilin100% (4)
- Clulasdeschwann 130925144220 Phpapp02Documento40 pagineClulasdeschwann 130925144220 Phpapp02James OliverNessuna valutazione finora
- Atividade 3Documento1 paginaAtividade 3James OliverNessuna valutazione finora
- Constantino I e Santa Helena Slide OficialDocumento25 pagineConstantino I e Santa Helena Slide OficialJames OliverNessuna valutazione finora
- Necros eDocumento25 pagineNecros eJames Oliver100% (1)
- Atividade 2 EmpreendedorismoDocumento1 paginaAtividade 2 EmpreendedorismoJames OliverNessuna valutazione finora
- ATLAS PATOLOGIADocumento32 pagineATLAS PATOLOGIANonato Oliveira Carvalho Junior100% (1)
- Cinética QuímicaDocumento5 pagineCinética QuímicaJames OliverNessuna valutazione finora
- 3AulaÁguaTermologiaBiofísicaUFMA2013AdrianaCamara PDFDocumento15 pagine3AulaÁguaTermologiaBiofísicaUFMA2013AdrianaCamara PDFJames OliverNessuna valutazione finora
- Equações na HP50gDocumento12 pagineEquações na HP50gJames OliverNessuna valutazione finora
- UNIVERSIDADE FEDERAL DO MARANHÃO MaxilarDocumento4 pagineUNIVERSIDADE FEDERAL DO MARANHÃO MaxilarJames OliverNessuna valutazione finora
- A Implantação de Recursos HumanosDocumento2 pagineA Implantação de Recursos HumanosJames OliverNessuna valutazione finora
- UFB - HiperestáticaDocumento98 pagineUFB - HiperestáticaAlex Roda MacielNessuna valutazione finora
- Apostila Cinetica QuimicaDocumento5 pagineApostila Cinetica QuimicaJames OliverNessuna valutazione finora
- Apostila Botanica IDocumento3 pagineApostila Botanica IJames OliverNessuna valutazione finora
- Programação Computacional na Metodologia BIMDocumento75 pagineProgramação Computacional na Metodologia BIMLuizNessuna valutazione finora
- Listas de Exercícios - 2 - FT IDocumento3 pagineListas de Exercícios - 2 - FT ITales Capra NascimentoNessuna valutazione finora
- Simbolismo Junguiano e Os Quatro Elementos Da AstrologiaDocumento8 pagineSimbolismo Junguiano e Os Quatro Elementos Da AstrologiaRaQuel QueirozNessuna valutazione finora
- Lista de Trigonometria - Arcos e Ângulos - GABARITODocumento8 pagineLista de Trigonometria - Arcos e Ângulos - GABARITOThalyta ChavesNessuna valutazione finora
- ENG - 0002 - Informacao - Tecnica - DTE - DTP 1 PDFDocumento33 pagineENG - 0002 - Informacao - Tecnica - DTE - DTP 1 PDFAntenógenesNessuna valutazione finora
- Instalação mecânica e elétrica do controlador P501Documento2 pagineInstalação mecânica e elétrica do controlador P501christian.kojiNessuna valutazione finora
- A Geometria Sagrada na NaturezaDocumento3 pagineA Geometria Sagrada na NaturezaLucianaNessuna valutazione finora
- 3 SolubilidadedosfarmacosDocumento53 pagine3 SolubilidadedosfarmacosMichel Vilarinho CarvalhoNessuna valutazione finora
- Aeronave - BRATI01Documento352 pagineAeronave - BRATI01rafaelldalpraNessuna valutazione finora
- Aula 4Documento12 pagineAula 4Aniceto RosarioNessuna valutazione finora
- Introdução à Economia: Exercícios de Demanda, Oferta e EquilíbrioDocumento3 pagineIntrodução à Economia: Exercícios de Demanda, Oferta e EquilíbrioGuilherme Santos0% (1)
- LIMA, L. Estatística Aplicada. PECEGEDocumento81 pagineLIMA, L. Estatística Aplicada. PECEGEthiduarte14Nessuna valutazione finora
- Ensaio de PermeabilidadeDocumento8 pagineEnsaio de PermeabilidadeIsabella C. Braido Do NascimentoNessuna valutazione finora
- Estatística Aplicada I - Títulos de QuestõesDocumento12 pagineEstatística Aplicada I - Títulos de QuestõesGabriel Augusto JM100% (1)
- Manutenção roçadeirasDocumento1 paginaManutenção roçadeirasTiago Cavalcante25% (4)
- Estruturas Algébricas - Aula 3 - Relações e Aplicações IIDocumento18 pagineEstruturas Algébricas - Aula 3 - Relações e Aplicações IICarlos Emilio Saraiva SaraivaNessuna valutazione finora
- Dimensionamento de tubulações GAELIDocumento178 pagineDimensionamento de tubulações GAELIkromettalNessuna valutazione finora
- Modulação Digital e AnalógicaDocumento35 pagineModulação Digital e AnalógicaAlberto HertzNessuna valutazione finora
- Exercicios de FunçõesDocumento30 pagineExercicios de FunçõesLeonardo CostaNessuna valutazione finora
- 1 - Ficha TrabalhoDocumento5 pagine1 - Ficha Trabalhopaula78oliveira9867100% (1)
- Equilíbrio químico entre íons cromato e dicromatoDocumento6 pagineEquilíbrio químico entre íons cromato e dicromatoCarolina MoreiraNessuna valutazione finora
- Lista de Exercícios de Probabilidade PDFDocumento12 pagineLista de Exercícios de Probabilidade PDFRandy Ambrósio QjNessuna valutazione finora
- Manual Bomba Frigostrella BZM Com Capa - Ed 2020 - (09-03-2020) PDFDocumento35 pagineManual Bomba Frigostrella BZM Com Capa - Ed 2020 - (09-03-2020) PDFDanilo Magalhães100% (1)
- Calcular o Ângulo Formado Por Uma Cobertura Com A Horizontal. Rumos e AzimutesDocumento60 pagineCalcular o Ângulo Formado Por Uma Cobertura Com A Horizontal. Rumos e AzimutesvirgilioNessuna valutazione finora
- Medidas de Tendência CentralDocumento49 pagineMedidas de Tendência CentralGustavo HenriqueNessuna valutazione finora
- Matemática: Grandezas proporcionaisDocumento223 pagineMatemática: Grandezas proporcionaisWellizzy Da Nigth Vission100% (1)
- Livro Completo de GuitarraDocumento150 pagineLivro Completo de GuitarraSoluções Multimídia100% (2)
- O Biômetro de Bovis - RadiestesiaDocumento3 pagineO Biômetro de Bovis - Radiestesiacarla100% (1)
- MANUAL PA CARREGADEIRA JBCDocumento6 pagineMANUAL PA CARREGADEIRA JBCemerson da silva santosNessuna valutazione finora
- PPQ Cap4 Atualizado 2Documento43 paginePPQ Cap4 Atualizado 2André CasimiroNessuna valutazione finora