Potrebbero piacerti anche
- Caracteristicas de Respuestas de Los SistemasDocumento37 pagineCaracteristicas de Respuestas de Los SistemasDominguez RonaldNessuna valutazione finora
- UNIDAD 3 Respuesta Dinamica Ing ControlDocumento11 pagineUNIDAD 3 Respuesta Dinamica Ing ControlJose Alfredo Salas PanfiloNessuna valutazione finora
- Sistemas de Primer y Segundo OrdenDocumento7 pagineSistemas de Primer y Segundo OrdenCesar Alberto Cansino PerezNessuna valutazione finora
- Respuesta de un oscilador simple: ecuaciones y solucionesDocumento14 pagineRespuesta de un oscilador simple: ecuaciones y solucionesMich SusañaNessuna valutazione finora
- Expo Tema 4.2Documento23 pagineExpo Tema 4.2Mariana Leyva EspinozaNessuna valutazione finora
- Entrada Tipo ParabolaDocumento28 pagineEntrada Tipo ParabolaJuan Camilo NaranjoNessuna valutazione finora
- Señales de EntradaDocumento34 pagineSeñales de EntradaJuan Camilo NaranjoNessuna valutazione finora
- Tema Propiedades Termodinámicas PDFDocumento33 pagineTema Propiedades Termodinámicas PDFYarizbet Arleny AJNessuna valutazione finora
- PDF Unidad 3 Respuesta Dinamica Ing Control DDDocumento11 paginePDF Unidad 3 Respuesta Dinamica Ing Control DDAlexis PinedaNessuna valutazione finora
- PDF Unidad 3 Respuesta Dinamica Ing Control DDDocumento11 paginePDF Unidad 3 Respuesta Dinamica Ing Control DDAlexis PinedaNessuna valutazione finora
- Ejercicios Resueltos de AutomáticaDocumento26 pagineEjercicios Resueltos de AutomáticaNico PerezNessuna valutazione finora
- Respuesta Transitoria y EstableDocumento13 pagineRespuesta Transitoria y Estableoscar yimy rengifo cardenasNessuna valutazione finora
- Modelado de Circuitos ElectricosDocumento30 pagineModelado de Circuitos Electricosjlola100% (1)
- Asignacion 1 Llaboratorio de Sistemas de ControlDocumento11 pagineAsignacion 1 Llaboratorio de Sistemas de ControlErwin Geovanni Villalobos GutiérrezNessuna valutazione finora
- Funcion de TransferenciaDocumento14 pagineFuncion de TransferenciaSADszfdgfhgjhmj,Nessuna valutazione finora
- Informe de Laboratorio - Identificación de SistemasDocumento25 pagineInforme de Laboratorio - Identificación de SistemasCamilo MontoyaNessuna valutazione finora
- Sistemas de Segundo OrdenDocumento37 pagineSistemas de Segundo OrdenGabriela Abigail Lazo de la CruzNessuna valutazione finora
- ENCARGO14 - Manutencao de Confiabilidade e Disponibilidade-HerreraReyesBrendaKamila - PARTE 21Documento12 pagineENCARGO14 - Manutencao de Confiabilidade e Disponibilidade-HerreraReyesBrendaKamila - PARTE 21conceptmarbellaNessuna valutazione finora
- Unidad 3 Ing de ControlDocumento15 pagineUnidad 3 Ing de ControlFran E. CerinoNessuna valutazione finora
- Ejercicios Resueltos de AutomáticaDocumento16 pagineEjercicios Resueltos de AutomáticaGallego OrtizNessuna valutazione finora
- Sistemas LinealesDocumento17 pagineSistemas LinealesRicardoNessuna valutazione finora
- CP 29Documento6 pagineCP 29hdzcesNessuna valutazione finora
- Mise Henry PDFDocumento30 pagineMise Henry PDFDavid MiseNessuna valutazione finora
- Unidad 3 Respuesta DinamicaDocumento15 pagineUnidad 3 Respuesta DinamicaJhonniIsrael MorenoCheNessuna valutazione finora
- Moldeamiento Dinámico de Un Estanque de AguaDocumento28 pagineMoldeamiento Dinámico de Un Estanque de AguaKekaNessuna valutazione finora
- Separadores FlashDocumento7 pagineSeparadores FlashMiguel FrezNessuna valutazione finora
- 3.4.10 - Tranformada de Laplace de La Funcion Delta DiracDocumento4 pagine3.4.10 - Tranformada de Laplace de La Funcion Delta DiracKandro King Aguilar AndradeNessuna valutazione finora
- Aplicación de La Transformada de Laplace A Los Circuitos EléctricosDocumento22 pagineAplicación de La Transformada de Laplace A Los Circuitos EléctricosVictor Almendra100% (3)
- Circuitos RLCDocumento15 pagineCircuitos RLCAxel RoblesNessuna valutazione finora
- 6X 19310412 Inv5Documento52 pagine6X 19310412 Inv5OSCAR RUBIO LEONNessuna valutazione finora
- Aplicaciones A Ingenieria Metodo de Trapecio y EDODocumento7 pagineAplicaciones A Ingenieria Metodo de Trapecio y EDOAllfredo RamiirezNessuna valutazione finora
- Análisis de la respuesta temporal de sistemas de segundo ordenDocumento42 pagineAnálisis de la respuesta temporal de sistemas de segundo ordenJuan Camilo NaranjoNessuna valutazione finora
- Resumen Transformada de LaplaceDocumento5 pagineResumen Transformada de LaplaceBaba_0305Nessuna valutazione finora
- Buck Converter Ecuaciones DinámicasDocumento8 pagineBuck Converter Ecuaciones DinámicasJosé Ignacio Quintanilla AcevedoNessuna valutazione finora
- Análisis de La Respuesta Transitoria y EstacionariaDocumento27 pagineAnálisis de La Respuesta Transitoria y EstacionariaAlfredo Gil Velasco100% (1)
- Circuito Electrico Mixto y Ecuaciones DiferencialesDocumento14 pagineCircuito Electrico Mixto y Ecuaciones DiferencialesjhonatanNessuna valutazione finora
- Análisis Transitorio Del Circuito Inductivo RLDocumento18 pagineAnálisis Transitorio Del Circuito Inductivo RLElyBJNessuna valutazione finora
- S3 Respuesta de Sistemas PDFDocumento66 pagineS3 Respuesta de Sistemas PDFAngel AlvarezNessuna valutazione finora
- Dinamica de Sistemas de Control, Variable de Estado, Cap 2Documento17 pagineDinamica de Sistemas de Control, Variable de Estado, Cap 2Tony YespaNessuna valutazione finora
- Icc Uni 3Documento17 pagineIcc Uni 3marcos calixtoNessuna valutazione finora
- Unidad 3 Respuesta DinamicaDocumento17 pagineUnidad 3 Respuesta DinamicaJose AmbrocioNessuna valutazione finora
- Trabajo Final ElectromecanicaDocumento19 pagineTrabajo Final ElectromecanicaJesse MauricioNessuna valutazione finora
- Circuitos RLC de segundo ordenDocumento25 pagineCircuitos RLC de segundo ordenLauro Ornelas MauricioNessuna valutazione finora
- Circuitxs 2Documento113 pagineCircuitxs 2Brandon BritosNessuna valutazione finora
- Sistemas de primer y segundo ordenDocumento17 pagineSistemas de primer y segundo ordenRaciel Zarate SanchezNessuna valutazione finora
- Unidad 3 - Análisis Transitorio y en Estado EstableDocumento22 pagineUnidad 3 - Análisis Transitorio y en Estado Estableangel9021Nessuna valutazione finora
- Sistema de Primer OrdenDocumento30 pagineSistema de Primer Ordenpaola ordazNessuna valutazione finora
- Criterios de Equilibrios TermodinamicosDocumento6 pagineCriterios de Equilibrios TermodinamicosEdson Vera RuízNessuna valutazione finora
- Sistemas de Segundo OrdenDocumento10 pagineSistemas de Segundo OrdenJavier Chiliquinga SalazarNessuna valutazione finora
- Example 10Documento9 pagineExample 10Ximena GutierrezNessuna valutazione finora
- 3-Unidad2 SolucionClasicaDocumento113 pagine3-Unidad2 SolucionClasicamatias martinezNessuna valutazione finora
- Proyecto de Modelado e Implementación de Sistemas Eléctricos de Segundo y Tercer OrdenDocumento15 pagineProyecto de Modelado e Implementación de Sistemas Eléctricos de Segundo y Tercer OrdenenriqueNessuna valutazione finora
- Lectura CriticaDocumento6 pagineLectura CriticaFranckliin GuamánNessuna valutazione finora
- Coeficiente de AmortiguamientoDocumento9 pagineCoeficiente de Amortiguamientoleopj22Nessuna valutazione finora
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesDa EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesNessuna valutazione finora
- Ejercicios de Ecuaciones Diferenciales OrdinariasDa EverandEjercicios de Ecuaciones Diferenciales OrdinariasValutazione: 4 su 5 stelle4/5 (1)
- 1 UnidadesDocumento3 pagine1 UnidadesClaudioNessuna valutazione finora
- Teoría, historia y territorio del ambiente urbano según Santiago CalatravaDocumento4 pagineTeoría, historia y territorio del ambiente urbano según Santiago CalatravaLUISA FERNANDA GARZÓN GÓMEZ100% (1)
- Analisis Del Derrame de Petroleo en La Lizama 158Documento7 pagineAnalisis Del Derrame de Petroleo en La Lizama 158adriana garayNessuna valutazione finora
- 3Documento34 pagine3Genny Isabel Geldres PintoNessuna valutazione finora
- Mapa mental universitarioDocumento17 pagineMapa mental universitarioMicaella OlayuncaNessuna valutazione finora
- Gonartrosis (Artrosis de Rodilla) 02Documento6 pagineGonartrosis (Artrosis de Rodilla) 02Maria AdelaNessuna valutazione finora
- Interoparibilidad Eficiencia Gestion Publica MunicipalidadDocumento18 pagineInteroparibilidad Eficiencia Gestion Publica Municipalidadelvis100% (1)
- Grasa Bentona PDFDocumento1 paginaGrasa Bentona PDFStiven VargasNessuna valutazione finora
- 52 - Personeria de La Ceja Del TamboDocumento17 pagine52 - Personeria de La Ceja Del TamboJavier BernalNessuna valutazione finora
- Presentacion Seminario IngenieriaDocumento12 paginePresentacion Seminario Ingenieriajuan caicedoNessuna valutazione finora
- Plan Institucional de Desarrollo de La Investigacion 2015 2020Documento47 paginePlan Institucional de Desarrollo de La Investigacion 2015 2020lauraoviedodiaz87Nessuna valutazione finora
- PLAN Obras Literarias de Renacimiento Proy9Documento5 paginePLAN Obras Literarias de Renacimiento Proy9Alma Daniela Rodriguez HNessuna valutazione finora
- Actividad de Evaluación Continua (AEC) PDFDocumento3 pagineActividad de Evaluación Continua (AEC) PDFAlvaroLlamasCarlesNessuna valutazione finora
- Aluvion HuaycoDocumento3 pagineAluvion HuaycoBethy TiradoNessuna valutazione finora
- 3 - Transformadores de Tensión InductivoDocumento62 pagine3 - Transformadores de Tensión Inductivofelipe reinoso100% (1)
- PR-COR-OPFD-004 - QB2-004 V01 Procedimiento Proceso ProducciónDocumento26 paginePR-COR-OPFD-004 - QB2-004 V01 Procedimiento Proceso ProducciónJotaypeNessuna valutazione finora
- Guía 9° Segundo Periodo Sistema de Ecuaciones PDFDocumento9 pagineGuía 9° Segundo Periodo Sistema de Ecuaciones PDFJINETH HERNANDEZNessuna valutazione finora
- Dessarrollo de Algunos Puntos Tomados en Clases DERECHO AGRARIO Y MINASDocumento15 pagineDessarrollo de Algunos Puntos Tomados en Clases DERECHO AGRARIO Y MINASGerardo GómezNessuna valutazione finora
- Torreon de Seguridad 2018Documento15 pagineTorreon de Seguridad 2018Silvio Daniel Martínez OlivasNessuna valutazione finora
- Estaciones IIIDocumento26 pagineEstaciones IIIGonza ReyesNessuna valutazione finora
- Clima de Europa - SHC 6º SocialesDocumento1 paginaClima de Europa - SHC 6º SocialesAuro Perez Cuadrado0% (1)
- Columna PeriodisticaDocumento1 paginaColumna PeriodisticaAndrea Pérez ArroyoNessuna valutazione finora
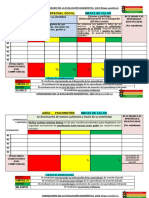
- Consolidado Del La Evaluación Diagnóstica 2021 Mapa de Calor SemaforoDocumento6 pagineConsolidado Del La Evaluación Diagnóstica 2021 Mapa de Calor SemaforoEdith Maza campomanes100% (1)
- Fundamentos Homeopatía Historia PrincipiosDocumento22 pagineFundamentos Homeopatía Historia PrincipiosLiliNessuna valutazione finora
- Agosto 2022 Pasajero7 FDocumento44 pagineAgosto 2022 Pasajero7 FLuis BSNessuna valutazione finora
- El PlanoDocumento13 pagineEl PlanoAlexiño Cieza ZamoraNessuna valutazione finora
- Ficha de Monitoreo de Lecturas - PP y MinimalismoDocumento2 pagineFicha de Monitoreo de Lecturas - PP y MinimalismohalNessuna valutazione finora
- Laboratorio Ojo de La VacaDocumento14 pagineLaboratorio Ojo de La VacaNiceth Natalia Ricaurte MorenoNessuna valutazione finora
- Fisicas Climatologicas Del Continente AmericanoDocumento5 pagineFisicas Climatologicas Del Continente AmericanoJosue VidezNessuna valutazione finora
- Proyecto Mi EnciclopediaDocumento6 pagineProyecto Mi EnciclopediaLorena IwanczynaNessuna valutazione finora