Potrebbero piacerti anche
- Curso - Propulsores - I - Mecanica de FluidosDocumento90 pagineCurso - Propulsores - I - Mecanica de FluidosMichael Encalada Benites100% (1)
- El Sistema Propulsivo Del Buque (Julio)Documento27 pagineEl Sistema Propulsivo Del Buque (Julio)tooomo33100% (1)
- Sistema Propulsion BuqueDocumento31 pagineSistema Propulsion BuqueVictor Jesus RiosNessuna valutazione finora
- Plantas Propulsoras A Vapor y Gas - MV 316Documento76 paginePlantas Propulsoras A Vapor y Gas - MV 316Luis Angel ZorrillaNessuna valutazione finora
- Transformacion de Una Embarcación Pesquera de Cerco de 23 Metros de Eslora A Una Embarcacion Destinada Al Servicio Auxiliar en BahiaDocumento115 pagineTransformacion de Una Embarcación Pesquera de Cerco de 23 Metros de Eslora A Una Embarcacion Destinada Al Servicio Auxiliar en BahiaEDINSON100% (1)
- Diseño de Un Buque - Practica N1Documento34 pagineDiseño de Un Buque - Practica N1Alexandro BravoNessuna valutazione finora
- MV436 9. - Propulsores NavalesDocumento7 pagineMV436 9. - Propulsores NavalesDiegoJoseAlvarezSierraNessuna valutazione finora
- Aparato de GobiernoDocumento13 pagineAparato de GobiernoMariño René50% (2)
- El Efecto Del Bulbo de Proa en El Comportamiento Del BuqueDocumento20 pagineEl Efecto Del Bulbo de Proa en El Comportamiento Del BuqueKARGNessuna valutazione finora
- 3ra Semana Control AveriasDocumento34 pagine3ra Semana Control AveriasALTAIR CORDOVA ALVARADONessuna valutazione finora
- Formulario - Curvas HidrostaticasDocumento3 pagineFormulario - Curvas HidrostaticasEsteban FigueroaNessuna valutazione finora
- Curso Propulsores III - HelicesDocumento51 pagineCurso Propulsores III - HelicesMichael Encalada Benites100% (5)
- HelicesDocumento10 pagineHelicesAdriana Isabel Parra de CastilloNessuna valutazione finora
- PFC Gestion de La Reparacion de Un Buque en Astillero PDFDocumento118 paginePFC Gestion de La Reparacion de Un Buque en Astillero PDFAnibal Vp100% (1)
- Trabajo de Investigación Remolcadores-Alvarez Iñiguez CarolinaDocumento14 pagineTrabajo de Investigación Remolcadores-Alvarez Iñiguez CarolinaCarolina Álvarez IñiguezNessuna valutazione finora
- Aplicaciones CarenaDocumento16 pagineAplicaciones CarenaJS Vargas TNessuna valutazione finora
- Potencia y HliceDocumento8 paginePotencia y HliceHector Luís Mendoza CervantesNessuna valutazione finora
- Teoría de BuqueDocumento7 pagineTeoría de BuqueSacheel Ortiz0% (1)
- Curso - Propulsores - IV - Interaccion Carena - HeliceDocumento33 pagineCurso - Propulsores - IV - Interaccion Carena - HeliceMichael Encalada BenitesNessuna valutazione finora
- 3 Agujas Magnéticas y GiroscópicasDocumento26 pagine3 Agujas Magnéticas y GiroscópicasAgustí Martïn Mallofré100% (1)
- Tratado de ManiobraDocumento108 pagineTratado de ManiobraRene Ezequiel Alvarado BerrocalNessuna valutazione finora
- Mantenimiento Motor MarinoDocumento5 pagineMantenimiento Motor MarinoEver Leite100% (1)
- Clase 2 - Capitulo 1 PDFDocumento54 pagineClase 2 - Capitulo 1 PDFMarcelo ResckNessuna valutazione finora
- Sistema Electrico Del BuqueDocumento19 pagineSistema Electrico Del BuqueAndy VilchezNessuna valutazione finora
- Desplazamiento Del BuqueDocumento7 pagineDesplazamiento Del BuqueJhosmerQueroNessuna valutazione finora
- Diseño de YatesDocumento14 pagineDiseño de YatesArturo GBNessuna valutazione finora
- Método de SavitskyDocumento6 pagineMétodo de SavitskyLuis CollNessuna valutazione finora
- Sankey ZorrillaDocumento8 pagineSankey ZorrillaLuis Angel Zorrilla100% (2)
- Hélice MarinaDocumento41 pagineHélice Marinajrobertlc100% (1)
- 1ra Semana Control AveriasDocumento21 pagine1ra Semana Control AveriasALTAIR CORDOVA ALVARADO100% (1)
- Universidad Nacional de Ingeniería Facultad de Ingeniería MecánicaDocumento71 pagineUniversidad Nacional de Ingeniería Facultad de Ingeniería Mecánicacarlos auvin rojas leonNessuna valutazione finora
- Proyecto BUQUE PETROLERO PDFDocumento590 pagineProyecto BUQUE PETROLERO PDFEdgard AntonioNessuna valutazione finora
- El Proyecto Del Buque MercanteDocumento18 pagineEl Proyecto Del Buque MercanteEduardo TorresNessuna valutazione finora
- PFC Jaime García Ruyman MedinaDocumento513 paginePFC Jaime García Ruyman MedinaozielcoNessuna valutazione finora
- Caracterización de Las Instalaciones Energéticas de Un BuqueDocumento43 pagineCaracterización de Las Instalaciones Energéticas de Un BuquePablo González RomeroNessuna valutazione finora
- Plantas Propulsoras NavalesDocumento4 paginePlantas Propulsoras Navalesrafael espinosa semper100% (1)
- 2.1 EstanqueidadDocumento3 pagine2.1 EstanqueidadNicolás Villegas ArcosNessuna valutazione finora
- Word ClaseDocumento23 pagineWord ClasetrewuNessuna valutazione finora
- Experimento InclinaciónDocumento4 pagineExperimento Inclinaciónfagagomez7373Nessuna valutazione finora
- Libro Propulsion PDFDocumento519 pagineLibro Propulsion PDFRafael Acosta100% (2)
- Diseño Del Buque.Documento4 pagineDiseño Del Buque.Ana SandovalNessuna valutazione finora
- Potencia PropulsoraDocumento24 paginePotencia PropulsoraangelNessuna valutazione finora
- Hélices NáuticasDocumento22 pagineHélices Náuticaseduardo_albornoz_5100% (1)
- Ejercicios Centroide y Momento InerciaDocumento3 pagineEjercicios Centroide y Momento InerciaSantiago Suárez TovarNessuna valutazione finora
- El TimonDocumento4 pagineEl TimonJesus Manuel Larez JimenezNessuna valutazione finora
- Cuestionario de Cálculo de EstructurasDocumento32 pagineCuestionario de Cálculo de EstructurasArledis De Forbes100% (2)
- 3-2015-Teoria Del Buque Completo PDFDocumento23 pagine3-2015-Teoria Del Buque Completo PDFMiguel PamplonaNessuna valutazione finora
- Mantenimiento de BuquesDocumento38 pagineMantenimiento de BuquesChristhian Frank100% (1)
- Servicio de Agua SaladaDocumento8 pagineServicio de Agua SaladaKARGNessuna valutazione finora
- Equipos y Servicios. Sistemas AuxiliaresDocumento67 pagineEquipos y Servicios. Sistemas AuxiliaresJosé Agustín González AlmeidaNessuna valutazione finora
- Comportamiento en La Mar de Estructuras FlotantesDocumento6 pagineComportamiento en La Mar de Estructuras FlotantesJhon LeftrrsNessuna valutazione finora
- Un tripulante llamado Murphy: (Santander-Elba-Santander en el Corto Maltés)Da EverandUn tripulante llamado Murphy: (Santander-Elba-Santander en el Corto Maltés)Nessuna valutazione finora
- El Proyecto Del Buque Sistemas Basicos DDocumento25 pagineEl Proyecto Del Buque Sistemas Basicos DMario ParedesNessuna valutazione finora
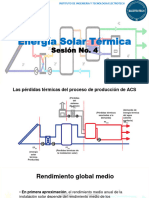
- Energia Solar Termica Sesion 4Documento44 pagineEnergia Solar Termica Sesion 4Antero Siva RamosNessuna valutazione finora
- Manual FinalizadoDocumento14 pagineManual FinalizadoCarlos Alejandro Mancia GarciaNessuna valutazione finora
- Trabojo Final D CentralesDocumento23 pagineTrabojo Final D Centralesosvaldo perezNessuna valutazione finora
- Centrales Termicas Con Grupos ElectrogenosDocumento54 pagineCentrales Termicas Con Grupos ElectrogenosMarco Soraluz Cubas0% (1)
- Modelo 1Documento4 pagineModelo 1Fabian SanzNessuna valutazione finora
- Balance MotorDocumento8 pagineBalance MotorJachNessuna valutazione finora
- 0.-Material Ácidos y Bases en La Vida Cotidiana - AU 205Documento10 pagine0.-Material Ácidos y Bases en La Vida Cotidiana - AU 205quarkqNessuna valutazione finora
- Teoría de Sucesiones y SeriesDocumento6 pagineTeoría de Sucesiones y SeriesquarkqNessuna valutazione finora
- Petroleo Libro2Documento129 paginePetroleo Libro2quarkqNessuna valutazione finora
- Lineamientos para Viáticos y Gastos de ViajesDocumento5 pagineLineamientos para Viáticos y Gastos de ViajesquarkqNessuna valutazione finora