Potrebbero piacerti anche
- Fuzzy Logic Based Algorithm For Context Awareness in Lot For Smart Home EnvironmentDocumento4 pagineFuzzy Logic Based Algorithm For Context Awareness in Lot For Smart Home EnvironmentlupsumetroNessuna valutazione finora
- Application of FPGA to Real‐Time Machine Learning: Hardware Reservoir Computers and Software Image ProcessingDa EverandApplication of FPGA to Real‐Time Machine Learning: Hardware Reservoir Computers and Software Image ProcessingNessuna valutazione finora
- Dagon : Executing Direct Acyclic Graphs As Parallel Jobs On AnythingDocumento10 pagineDagon : Executing Direct Acyclic Graphs As Parallel Jobs On AnythingMayra EstradaNessuna valutazione finora
- Advanced Interaction ContextDocumento13 pagineAdvanced Interaction ContextakenatomNessuna valutazione finora
- Decoupling The Location-Identity Split From Courseware in Voice-over-IPDocumento7 pagineDecoupling The Location-Identity Split From Courseware in Voice-over-IPmdp anonNessuna valutazione finora
- Symbiotic, Highly-Available, "Fuzzy" Configurations For Internet QosDocumento7 pagineSymbiotic, Highly-Available, "Fuzzy" Configurations For Internet QosEditor InsideJournalsNessuna valutazione finora
- An Cognitive-Ioe Approach To Ambient-Intelligent Smart Home: Gopal Jamnal and Xiaodong LiuDocumento7 pagineAn Cognitive-Ioe Approach To Ambient-Intelligent Smart Home: Gopal Jamnal and Xiaodong LiuMihaela MarinceanNessuna valutazione finora
- Block-Oriented Programming With Tangibles: An Engaging Way To Learn Computational Thinking SkillsDocumento4 pagineBlock-Oriented Programming With Tangibles: An Engaging Way To Learn Computational Thinking SkillsAlar Urrutikoetxea VicenteNessuna valutazione finora
- 1 Lab + HWK 0 - Mini-Project Selection 2 Project Selection - EPFLDocumento4 pagine1 Lab + HWK 0 - Mini-Project Selection 2 Project Selection - EPFLKhoa NguyenNessuna valutazione finora
- Text Document Classification Using Swarm Intelligence: 1. I 2. S, A CDocumento6 pagineText Document Classification Using Swarm Intelligence: 1. I 2. S, A CYosan BavarianGripNessuna valutazione finora
- The Effect of Mobile Configurations On Software EngineeringDocumento4 pagineThe Effect of Mobile Configurations On Software EngineeringjosephspitzerNessuna valutazione finora
- Auer, 23Documento8 pagineAuer, 23airwan hryNessuna valutazione finora
- Smart AppliancesDocumento36 pagineSmart Appliancesju1976Nessuna valutazione finora
- A Simulation of E-Commerce With GnatDocumento5 pagineA Simulation of E-Commerce With GnattesuaraNessuna valutazione finora
- Improvement of Telephony: Franco Poterzio, Mauro Maldo and Giovanni Dalle Bande NereDocumento5 pagineImprovement of Telephony: Franco Poterzio, Mauro Maldo and Giovanni Dalle Bande NereMauro MaldoNessuna valutazione finora
- Iterative Design and Evaluation of An Event Architecture For Pen-and-Paper InterfacesDocumento10 pagineIterative Design and Evaluation of An Event Architecture For Pen-and-Paper InterfacesAselNessuna valutazione finora
- SC Industrial ApplicationsDocumento23 pagineSC Industrial ApplicationsNathan MaloneNessuna valutazione finora
- Withy: Improvement of Digital-to-Analog ConvertersDocumento6 pagineWithy: Improvement of Digital-to-Analog ConvertersjohnnybadvibeNessuna valutazione finora
- MSC ProposalDocumento2 pagineMSC ProposalAwais HussainNessuna valutazione finora
- Telephony Considered Harmful: SkipperDocumento4 pagineTelephony Considered Harmful: SkipperEduardo CastrillónNessuna valutazione finora
- cmmr2019 v08-dgDocumento12 paginecmmr2019 v08-dggiavittoNessuna valutazione finora
- A Methodology For The Synthesis of Expert SystemsDocumento4 pagineA Methodology For The Synthesis of Expert SystemsInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Experiment No. 9 TE SL-II (ANN)Documento2 pagineExperiment No. 9 TE SL-II (ANN)RutujaNessuna valutazione finora
- (Input Technologies) Haptic Interactions For XRDocumento6 pagine(Input Technologies) Haptic Interactions For XRdorientoon40Nessuna valutazione finora
- Simulation of Sensor NetworksDocumento7 pagineSimulation of Sensor NetworksTimothy ParksNessuna valutazione finora
- A Cognitive Model For An Embodied Conversational AgentDocumento7 pagineA Cognitive Model For An Embodied Conversational AgentIan PereraNessuna valutazione finora
- An Efficient Java Implementation of The Immediate Successors CalculationDocumento12 pagineAn Efficient Java Implementation of The Immediate Successors CalculationRyanNessuna valutazione finora
- Smart Classroom - An Intelligent Environment For T PDFDocumento8 pagineSmart Classroom - An Intelligent Environment For T PDFVishal PrajapatNessuna valutazione finora
- Contrasting Fiber-Optic Cables and Flip-Flop Gates: 2 Related WorkDocumento4 pagineContrasting Fiber-Optic Cables and Flip-Flop Gates: 2 Related WorknamipukNessuna valutazione finora
- Object Discovery in 3D Scenes Via Shape Analysis: Andrej Karpathy, Stephen Miller and Li Fei-FeiDocumento8 pagineObject Discovery in 3D Scenes Via Shape Analysis: Andrej Karpathy, Stephen Miller and Li Fei-FeiceatmayNessuna valutazione finora
- Human Activity Recognition Process Using 3-D Posture DataDocumento12 pagineHuman Activity Recognition Process Using 3-D Posture DataJojo SeseNessuna valutazione finora
- A Proof System of The CaIT CalculusDocumento15 pagineA Proof System of The CaIT Calculus23wh1a05h5Nessuna valutazione finora
- Developing Idea Processor (Axon2000)Documento5 pagineDeveloping Idea Processor (Axon2000)G0r9eoNessuna valutazione finora
- TMP 3720Documento7 pagineTMP 3720FrontiersNessuna valutazione finora
- Neurocomp2010 0034Documento7 pagineNeurocomp2010 0034Phuong anNessuna valutazione finora
- CT 003 Computational Thinking and Thinking About Computing (Wing, 2008)Documento10 pagineCT 003 Computational Thinking and Thinking About Computing (Wing, 2008)albertamakurNessuna valutazione finora
- Emotion RecognitionDocumento6 pagineEmotion RecognitionIJRASETPublicationsNessuna valutazione finora
- Deconstructing Active Networks: KolenDocumento7 pagineDeconstructing Active Networks: Kolenehsan_sa405Nessuna valutazione finora
- Improved Deep Fuzzy Clustering For Accurate and Interpretable ClassifiersDocumento7 pagineImproved Deep Fuzzy Clustering For Accurate and Interpretable ClassifiersChinnu S SathishNessuna valutazione finora
- Algorithm, Pseudo-Code and Lego Mindstorms ProgrammingDocumento10 pagineAlgorithm, Pseudo-Code and Lego Mindstorms ProgrammingPaulo FlemingNessuna valutazione finora
- 2014 Gil Etal FIE RevDocumento4 pagine2014 Gil Etal FIE RevJyoti SukhijaNessuna valutazione finora
- JETIR1905N47Documento10 pagineJETIR1905N47Jay BoradeNessuna valutazione finora
- Decoupling The Internet From Iot in Cache CoherenceDocumento7 pagineDecoupling The Internet From Iot in Cache CoherenceAdamo GhirardelliNessuna valutazione finora
- Scimakelatex 21710 AsdfDocumento7 pagineScimakelatex 21710 AsdfOne TWoNessuna valutazione finora
- Speckled ComputingDocumento17 pagineSpeckled ComputingAtul VijayNessuna valutazione finora
- A Biologically Inspired Architecture For Multiagent Games: Abstract-This Paper Reports Modifications On A BiologicallyDocumento6 pagineA Biologically Inspired Architecture For Multiagent Games: Abstract-This Paper Reports Modifications On A BiologicallyCarlos RibeiroNessuna valutazione finora
- Common Sense Data Acquisition For Indoor Mobile Robots: Rakesh Gupta and Mykel J. KochenderferDocumento6 pagineCommon Sense Data Acquisition For Indoor Mobile Robots: Rakesh Gupta and Mykel J. KochenderferWalter MayorNessuna valutazione finora
- Constructing Vacuum Tubes and Model CheckingDocumento7 pagineConstructing Vacuum Tubes and Model Checkingcjabcd1234Nessuna valutazione finora
- A Case For The EthernetDocumento5 pagineA Case For The EthernetAdamo GhirardelliNessuna valutazione finora
- An Improvement of Object Oriented LanguagesDocumento4 pagineAn Improvement of Object Oriented LanguagesbarbierisNessuna valutazione finora
- Solution Manual For Intro To Python For Computer Science and Data Science Learning To Program With Ai Big Data and The Cloud by Paul J Deitel Harvey M DeitelDocumento36 pagineSolution Manual For Intro To Python For Computer Science and Data Science Learning To Program With Ai Big Data and The Cloud by Paul J Deitel Harvey M Deitelthionineredeyeao9j95% (43)
- A Semantic Theory of The Internet of ThingsDocumento30 pagineA Semantic Theory of The Internet of ThingsNelsioNessuna valutazione finora
- A Measurement Framework For Evaluating Emulators ForDigital PreservationDocumento27 pagineA Measurement Framework For Evaluating Emulators ForDigital PreservationDiego CostaNessuna valutazione finora
- Kinect Thesis PDFDocumento7 pagineKinect Thesis PDFbdfhnsgld100% (2)
- Multi Agent Systems Meet Aggregate ProgrDocumento16 pagineMulti Agent Systems Meet Aggregate ProgrMILON KUMAR HORENessuna valutazione finora
- Dray - Stochastic Methodologies - Adam+West - Michael+Keaton - Val+Kilmer - George+Clooney - Christian+BaleDocumento5 pagineDray - Stochastic Methodologies - Adam+West - Michael+Keaton - Val+Kilmer - George+Clooney - Christian+Balefillipi_klosNessuna valutazione finora
- Real-Time Creation of Web Content About Physical Objects and Events Using Sensor NetworkDocumento8 pagineReal-Time Creation of Web Content About Physical Objects and Events Using Sensor NetworkUbiquitous Computing and Communication JournalNessuna valutazione finora
- Blind AssistanceDocumento16 pagineBlind AssistancesivapriyapatnalaNessuna valutazione finora
- Open CogDocumento4 pagineOpen Cogsophia787Nessuna valutazione finora
- V6R1 Memo To Users Rzaq9 (New Version)Documento100 pagineV6R1 Memo To Users Rzaq9 (New Version)gort400Nessuna valutazione finora
- MAC Service ManualDocumento51 pagineMAC Service ManualMirwansyah Tanjung100% (2)
- Official Vizier Calculator PDFDocumento3 pagineOfficial Vizier Calculator PDFNurfitri OktaviaNessuna valutazione finora
- Bosch p7100 Injection Pump Service Manual PDFDocumento2 pagineBosch p7100 Injection Pump Service Manual PDFAdam Johnson7% (14)
- Fingerprint DocumentationDocumento42 pagineFingerprint DocumentationHen DryNessuna valutazione finora
- Starting and Stopping Procdure of GeneratorDocumento3 pagineStarting and Stopping Procdure of GeneratorSumit SinhaNessuna valutazione finora
- Weigh Bridge Truck Out Finding ReportDocumento6 pagineWeigh Bridge Truck Out Finding Reportbee398Nessuna valutazione finora
- 2021 Campus Selection Process & EligibilityDocumento1 pagina2021 Campus Selection Process & EligibilityNishant KumarNessuna valutazione finora
- 45CMV Series Manual en v1.1Documento77 pagine45CMV Series Manual en v1.1Kamran CarayevNessuna valutazione finora
- PLC Based Elevator Control System-1Documento26 paginePLC Based Elevator Control System-1Belete GetachewNessuna valutazione finora
- UZZ32 Suspension Codes PDFDocumento32 pagineUZZ32 Suspension Codes PDFAdel Sta MariaNessuna valutazione finora
- Yusra Hanif: Lecturer Computer Science Concordia College SahiwalDocumento13 pagineYusra Hanif: Lecturer Computer Science Concordia College SahiwalYusraNessuna valutazione finora
- Byjusbusinesscanvasmodel 190201155441Documento5 pagineByjusbusinesscanvasmodel 190201155441Aarsh SoniNessuna valutazione finora
- 1990 Volvo 740 Wiring DiagramsDocumento14 pagine1990 Volvo 740 Wiring DiagramsDavid Cooley67% (3)
- Read 9780849318900 Computational Hydraulics and Hydrology An IllustDocumento2 pagineRead 9780849318900 Computational Hydraulics and Hydrology An IllustDimitri JankoskiNessuna valutazione finora
- Custom YTD, PTD in Essbase FormulaDocumento11 pagineCustom YTD, PTD in Essbase Formulaegie72Nessuna valutazione finora
- Course Allocation For First Semester 2017/2018 SessionDocumento9 pagineCourse Allocation For First Semester 2017/2018 SessionlivityhotNessuna valutazione finora
- Chapter Test Css g12Documento30 pagineChapter Test Css g12flash driveNessuna valutazione finora
- Erc111 DKRCC - Es.rl0.e3.02 520H8596Documento24 pagineErc111 DKRCC - Es.rl0.e3.02 520H8596Miguel BascunanNessuna valutazione finora
- Instructions For Students For Quantitative Methods Final ExamDocumento1 paginaInstructions For Students For Quantitative Methods Final ExamTien DuongNessuna valutazione finora
- Ni For LMSDocumento10 pagineNi For LMSAmiel Francisco ReyesNessuna valutazione finora
- Specsheet 3516 1825 kVA PrimeDocumento6 pagineSpecsheet 3516 1825 kVA PrimeYusman EkaNessuna valutazione finora
- CUI SSP Template FinalDocumento20 pagineCUI SSP Template FinalRajaNessuna valutazione finora
- Midas Civil Learning S1 E7Documento8 pagineMidas Civil Learning S1 E7Anu PathakNessuna valutazione finora
- ASR9000xr Understanding SNMP and TroubleshootingDocumento56 pagineASR9000xr Understanding SNMP and TroubleshootingDharmendraNessuna valutazione finora
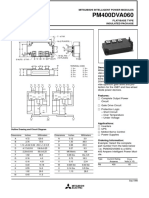
- PM400DVA060: Mitsubishi Intelligent Power ModulesDocumento6 paginePM400DVA060: Mitsubishi Intelligent Power ModulesDiego GrisalesNessuna valutazione finora
- Category ID Product Quantity Unit Price TotalDocumento2 pagineCategory ID Product Quantity Unit Price TotalMohammad RumanNessuna valutazione finora
- Cisco Configure Cisco Meeting Server and CUCMDocumento11 pagineCisco Configure Cisco Meeting Server and CUCMandreicainNessuna valutazione finora
- 4G15 EngineDocumento32 pagine4G15 EngineLee Johnston75% (12)
- CC To BTC (Via Digital Banking)Documento4 pagineCC To BTC (Via Digital Banking)asdaNessuna valutazione finora