Potrebbero piacerti anche
- Embedded Systems: ARM Programming and OptimizationDa EverandEmbedded Systems: ARM Programming and OptimizationNessuna valutazione finora
- Cpu Scheduling Algorithm: Switches From Waiting To Ready ExitsDocumento5 pagineCpu Scheduling Algorithm: Switches From Waiting To Ready Exitsseema syedNessuna valutazione finora
- STMJOURNALCPUSCHEDULINGDocumento6 pagineSTMJOURNALCPUSCHEDULINGDevidas ShindeNessuna valutazione finora
- Round RobinDocumento7 pagineRound RobinAmit MeherNessuna valutazione finora
- Thesis Cpu Scheduling AlgorithmsDocumento6 pagineThesis Cpu Scheduling Algorithmsangieleeportland100% (2)
- CPU Scheduling AlgorithmDocumento17 pagineCPU Scheduling AlgorithmShekhar JadhavNessuna valutazione finora
- Process Control Block With Cpu Scheduling AlgorithmDocumento12 pagineProcess Control Block With Cpu Scheduling AlgorithmRohit GadekarNessuna valutazione finora
- Operating Systems Project Based LabDocumento6 pagineOperating Systems Project Based LabBeverly NortonNessuna valutazione finora
- Osy ReportDocumento25 pagineOsy ReportOmkar KhutwadNessuna valutazione finora
- Computer Model TarvoDocumento13 pagineComputer Model TarvoNarayan ManeNessuna valutazione finora
- Fin Irjmets1662369943Documento6 pagineFin Irjmets1662369943rehewa4529Nessuna valutazione finora
- p34 WongDocumento10 paginep34 WongDavide Carmichael DoninelliNessuna valutazione finora
- SynopsisDocumento13 pagineSynopsisRangrez shaibazNessuna valutazione finora
- Paper 8Documento10 paginePaper 8Devidas ShindeNessuna valutazione finora
- CPU Scheduling Algorithms (Report)Documento17 pagineCPU Scheduling Algorithms (Report)Uzair A.91% (11)
- Implementing CPU Scheduling Algorithm: A) What Do You Mean by Context Switching ?Documento5 pagineImplementing CPU Scheduling Algorithm: A) What Do You Mean by Context Switching ?NoorNessuna valutazione finora
- Smart Round Robin CPU Scheduling Algorithm For Operating SystemsDocumento8 pagineSmart Round Robin CPU Scheduling Algorithm For Operating SystemsVedant JollyNessuna valutazione finora
- 1Documento11 pagine1aiadaiadNessuna valutazione finora
- Performance Enhancement of CPU Scheduling by Hybrid Algorithms Using Genetic ApproachDocumento3 paginePerformance Enhancement of CPU Scheduling by Hybrid Algorithms Using Genetic ApproachIjarcet Journal100% (1)
- OS Lec2Documento12 pagineOS Lec2Huzaifa AhmedNessuna valutazione finora
- Software Timing Analysis Using HWSW Cosimulation and Instruction Set SimulatorDocumento5 pagineSoftware Timing Analysis Using HWSW Cosimulation and Instruction Set Simulatorkmjung1Nessuna valutazione finora
- Combinatory CPU Scheduling AlgorithmDocumento5 pagineCombinatory CPU Scheduling AlgorithmEngr Safiyan Abubakar GizaNessuna valutazione finora
- Osy MicroDocumento12 pagineOsy Microatul gaikwadNessuna valutazione finora
- A Comparative Study of CPU Scheduling AlgorithmsDocumento7 pagineA Comparative Study of CPU Scheduling AlgorithmsOmer TariqNessuna valutazione finora
- Kapil Sai PagadalaLab3Documento8 pagineKapil Sai PagadalaLab3ram jiNessuna valutazione finora
- Cse2005 - Operating SystemsDocumento10 pagineCse2005 - Operating SystemsADITYA SINGHNessuna valutazione finora
- A Comparative Study of CPU Scheduling Algorithms: July 2013Documento8 pagineA Comparative Study of CPU Scheduling Algorithms: July 2013ameer hamzaNessuna valutazione finora
- A Priority Based Round Robin CPU Scheduling Algorithm For Real Time SystemsDocumento11 pagineA Priority Based Round Robin CPU Scheduling Algorithm For Real Time SystemsVũNhậtCátNessuna valutazione finora
- An Optimized Round Robin Scheduling Algorithm For CPU Scheduling PDFDocumento3 pagineAn Optimized Round Robin Scheduling Algorithm For CPU Scheduling PDFccalero78Nessuna valutazione finora
- Assignment 1Documento4 pagineAssignment 1WmshadyNessuna valutazione finora
- Host-Compiled Multicore RTOS Simulator For Embedded Real-Time Software DevelopmentDocumento6 pagineHost-Compiled Multicore RTOS Simulator For Embedded Real-Time Software DevelopmentRey JohnNessuna valutazione finora
- Operating Systems: Literature Review On Scheduling Algorithms of Operating SystemDocumento12 pagineOperating Systems: Literature Review On Scheduling Algorithms of Operating SystemTeja PeddiNessuna valutazione finora
- Operating Systems CSE-2005: Under The Guidance Of, Prof. Sendhil Kumar K.S ByDocumento3 pagineOperating Systems CSE-2005: Under The Guidance Of, Prof. Sendhil Kumar K.S ByNandu ReddyNessuna valutazione finora
- RL SchedulingDocumento25 pagineRL Schedulingofaofa1Nessuna valutazione finora
- OS Final PaperDocumento21 pagineOS Final PaperSharan SharmaNessuna valutazione finora
- CPU Scheduling Algorithmsreport OSDocumento32 pagineCPU Scheduling Algorithmsreport OSlorone8362Nessuna valutazione finora
- Operating System and Information SystemDocumento26 pagineOperating System and Information SystemSurendra PokhrelNessuna valutazione finora
- Ijait 020602Documento12 pagineIjait 020602ijaitjournalNessuna valutazione finora
- Mod 4Documento19 pagineMod 4PraneethNessuna valutazione finora
- Assignment 1.2 CHAPTER 1Documento4 pagineAssignment 1.2 CHAPTER 1Scholar MacayNessuna valutazione finora
- Enhanced Priority Scheduling Algorithm TDocumento7 pagineEnhanced Priority Scheduling Algorithm Tkaifi azamNessuna valutazione finora
- 5 - Process SchedulingDocumento6 pagine5 - Process SchedulingmanoNessuna valutazione finora
- Embedded Multi-Processor System TopicsDocumento3 pagineEmbedded Multi-Processor System TopicsmathhoangNessuna valutazione finora
- Efficient Round Robin Cpu Scheduling Algorithm For Operating SystemsDocumento7 pagineEfficient Round Robin Cpu Scheduling Algorithm For Operating SystemsRamsés RamírezNessuna valutazione finora
- Performance Analysis of Parallel Algorithms On MulDocumento11 paginePerformance Analysis of Parallel Algorithms On MulRIYA GUPTANessuna valutazione finora
- Challenges in Scheduling in Operating System: February 2015Documento5 pagineChallenges in Scheduling in Operating System: February 2015Nutty NkosiNessuna valutazione finora
- Novel Real Time Scheduling Algorithm For Embedded Multimedia ApplicationsDocumento6 pagineNovel Real Time Scheduling Algorithm For Embedded Multimedia ApplicationsRakeshconclaveNessuna valutazione finora
- Unit I CSL 572 Operating SystemDocumento19 pagineUnit I CSL 572 Operating SystemRAZEB PATHANNessuna valutazione finora
- Unit IDocumento51 pagineUnit IDogiparthi ManishaNessuna valutazione finora
- Parallelizing SystemC Kernel For Fast Hardware Simulation On SMP MachinesDocumento8 pagineParallelizing SystemC Kernel For Fast Hardware Simulation On SMP MachinesNguyen Tuan AnhNessuna valutazione finora
- 04 Scheduling CDocumento24 pagine04 Scheduling CBigu Marius AlinNessuna valutazione finora
- Os and Sys Soft 2023Documento6 pagineOs and Sys Soft 2023Gloriya Priyadarshini CSNessuna valutazione finora
- Osy Microproject 29Documento15 pagineOsy Microproject 29Rohit GadekarNessuna valutazione finora
- Comparative Study of Various CPU Scheduling AlgorithmDocumento6 pagineComparative Study of Various CPU Scheduling AlgorithmInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Comparative Study of Scheduling Algorithms For Real Time EnvironmentDocumento4 pagineComparative Study of Scheduling Algorithms For Real Time EnvironmentSreedhar NagavellyNessuna valutazione finora
- Laboratory Exercises On Task Scheduling in Real-Time-Systems CourseDocumento13 pagineLaboratory Exercises On Task Scheduling in Real-Time-Systems Courseأيوب علاءNessuna valutazione finora
- LM13 - Multiprocessor & Real Time SchedulingDocumento18 pagineLM13 - Multiprocessor & Real Time SchedulingMani Deepak ChoudhryNessuna valutazione finora
- RTS M-4 NotesDocumento21 pagineRTS M-4 Notesmvs sowmyaNessuna valutazione finora
- Research Article: Amit Kumar Gupta ., Narendra Singh Yadav and Dinesh GoyalDocumento4 pagineResearch Article: Amit Kumar Gupta ., Narendra Singh Yadav and Dinesh GoyalOmer TariqNessuna valutazione finora
- CN Lab ManualDocumento34 pagineCN Lab ManualChaya Bsvrj75% (4)
- Computer Graphics Qut PaperDocumento2 pagineComputer Graphics Qut PaperjyotirmaypatelNessuna valutazione finora
- EXP5Documento3 pagineEXP5jyotirmaypatelNessuna valutazione finora
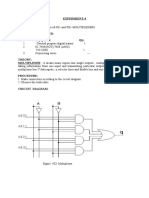
- EXP4Documento2 pagineEXP4jyotirmaypatelNessuna valutazione finora
- EXP3Documento2 pagineEXP3jyotirmaypatelNessuna valutazione finora
- EXP2Documento2 pagineEXP2jyotirmaypatelNessuna valutazione finora
- EXP1Documento3 pagineEXP1jyotirmaypatelNessuna valutazione finora
- Ncs-451 Lab ManualDocumento71 pagineNcs-451 Lab ManualjyotirmaypatelNessuna valutazione finora
- Asterix Band 16 Asterix Bei Den Schweizern PDFDocumento46 pagineAsterix Band 16 Asterix Bei Den Schweizern PDFJulia Jungle10% (10)
- SAP SLCM - Product ArchitectureDocumento59 pagineSAP SLCM - Product ArchitectureFawad AslamNessuna valutazione finora
- HP Man SM9.30 P3 ReleaseNotes PDFDocumento32 pagineHP Man SM9.30 P3 ReleaseNotes PDFArunkumar KumaresanNessuna valutazione finora
- QDK Arm Cortex Stm32 GnuDocumento38 pagineQDK Arm Cortex Stm32 Gnukalyanbn100% (2)
- Job Recommender Java Spring BootDocumento21 pagineJob Recommender Java Spring BootHanuman Sai MajetiNessuna valutazione finora
- Room Temperature Controller With 2 Point Control REV11 19252 HQ enDocumento2 pagineRoom Temperature Controller With 2 Point Control REV11 19252 HQ enIulianZaharescuNessuna valutazione finora
- How To Change Dbname Dbid and Instance NameDocumento16 pagineHow To Change Dbname Dbid and Instance NameG.R.THIYAGU ; Oracle DBANessuna valutazione finora
- Us 2189285Documento3 pagineUs 2189285Jorge ZepedaNessuna valutazione finora
- Management of Information Security 5th Edition Whitman Test BankDocumento9 pagineManagement of Information Security 5th Edition Whitman Test BankJonathanWoodfkwpx100% (18)
- VBDocumento2 pagineVBMichael BenilanNessuna valutazione finora
- Nokia Bluetooth Headset BH-118 User Guide: Issue 1.0Documento11 pagineNokia Bluetooth Headset BH-118 User Guide: Issue 1.0Can RapsNessuna valutazione finora
- Nathan Garcia: Education University of Texas at El Paso (Utep)Documento1 paginaNathan Garcia: Education University of Texas at El Paso (Utep)Nathan GarciaNessuna valutazione finora
- COC2 Introduction To Networking Week 1Documento41 pagineCOC2 Introduction To Networking Week 1Arman Santiago100% (1)
- RHEL 7 - Global File System 2 en-USDocumento68 pagineRHEL 7 - Global File System 2 en-USSerge PallaNessuna valutazione finora
- Computer Engineering Orientation - Module 04 - 05Documento9 pagineComputer Engineering Orientation - Module 04 - 05Joel ManacmulNessuna valutazione finora
- Se r18 Lab ManualDocumento145 pagineSe r18 Lab Manualpradeeperukulla100% (2)
- Entitlement Portal TrainingDocumento55 pagineEntitlement Portal TrainingDaniel Aravena ElorzaNessuna valutazione finora
- VxRAIL P570F SpecsDocumento4 pagineVxRAIL P570F SpecsdfsfdsfNessuna valutazione finora
- Usb 3.0 DriverDocumento11 pagineUsb 3.0 DriverAlex GmimNessuna valutazione finora
- FiletypeDocumento13 pagineFiletypeNeikos TenkoseiNessuna valutazione finora
- Manual Page - Aircrack-Ng (1Documento4 pagineManual Page - Aircrack-Ng (1fred182belNessuna valutazione finora
- PHP Assignment 3 For DatabaseDocumento6 paginePHP Assignment 3 For DatabaseNguyễn Huy HoàngNessuna valutazione finora
- Microprocessor Architecture 8085, 8086 & OtherDocumento289 pagineMicroprocessor Architecture 8085, 8086 & OtherAshraf Ul IslamNessuna valutazione finora
- Rhino Level 1 Training ManualDocumento276 pagineRhino Level 1 Training ManualClaudia TeodoroviciNessuna valutazione finora
- Teacher'S Work Assignment PlanDocumento4 pagineTeacher'S Work Assignment PlanArt Villaceran AgiwabNessuna valutazione finora
- DDS - Drive PLC Developer Studio (V02.00) - v2-3 - ENDocumento340 pagineDDS - Drive PLC Developer Studio (V02.00) - v2-3 - ENEber MontoyaNessuna valutazione finora
- Response Itsec2 Ex1 MalwareDocumento7 pagineResponse Itsec2 Ex1 Malwaretanmaya1991Nessuna valutazione finora
- Abstract For Chemcon Software Tool For Assessment in Paper IndustryDocumento2 pagineAbstract For Chemcon Software Tool For Assessment in Paper IndustrychandrakanthNessuna valutazione finora
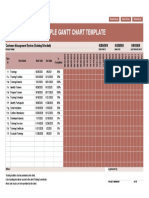
- Simple Gantt Chart Template - TemplateLabDocumento1 paginaSimple Gantt Chart Template - TemplateLabjparedesvillaltaNessuna valutazione finora
- A Markov Chain-Based Availability Model of Virtual Cluster NodesDocumento5 pagineA Markov Chain-Based Availability Model of Virtual Cluster NodesNguyen Tuan AnhNessuna valutazione finora