Potrebbero piacerti anche
- Hosa User GuideDocumento258 pagineHosa User GuideKarim ShahbazNessuna valutazione finora
- Small Adt MkII Elec SchematicsDocumento19 pagineSmall Adt MkII Elec SchematicsSMM ENTREPRISENessuna valutazione finora
- Axe FX II Owners ManualDocumento201 pagineAxe FX II Owners ManualJuan Carlos Fiallos Rodas100% (1)
- Hino 700 Brake EquipmentDocumento42 pagineHino 700 Brake Equipmentjoki marzuki100% (1)
- Manual de Partes Bob CatDocumento455 pagineManual de Partes Bob CatJugaro Oscar100% (2)
- Channel Estimation With MatlabDocumento34 pagineChannel Estimation With Matlabsaeedmap95% (19)
- Diagrama de Fuente BA21F0F0102 - Fuente Philips TV LCDDocumento1 paginaDiagrama de Fuente BA21F0F0102 - Fuente Philips TV LCDneumatraxxx83% (35)
- EQ Cheatsheet MixcloudDocumento43 pagineEQ Cheatsheet MixcloudВалентин Иванов100% (1)
- This Document Has Been Printed From SPI . Not For Resale: Engine Management SystemDocumento10 pagineThis Document Has Been Printed From SPI . Not For Resale: Engine Management SystemHaidar Al Mosawi100% (1)
- Information TheoryDocumento116 pagineInformation TheoryTahir SiddiquiNessuna valutazione finora
- Advanced VAV Control Sequences - Taylor Engineering - 2013Documento122 pagineAdvanced VAV Control Sequences - Taylor Engineering - 2013Steve JacobsonNessuna valutazione finora
- BS1 - Trip - Close Coil Voltage Drop Calculation Rev ADocumento11 pagineBS1 - Trip - Close Coil Voltage Drop Calculation Rev Apriyanka236Nessuna valutazione finora
- VHDL Fir FilterDocumento31 pagineVHDL Fir FilterSyam SanalNessuna valutazione finora
- Amkasyn - Aw - 1326 (Inglés)Documento21 pagineAmkasyn - Aw - 1326 (Inglés)Isao TomitaNessuna valutazione finora
- 18 12bit AD ConverterDocumento38 pagine18 12bit AD Converternicolas8702Nessuna valutazione finora
- Universal PBA Operation GuideDocumento7 pagineUniversal PBA Operation GuideEdison EspinalNessuna valutazione finora
- CPM1A-DA041: Operating ManualDocumento2 pagineCPM1A-DA041: Operating Manualomnitech2Nessuna valutazione finora
- Servo Amplifier VT 1600 Series 3X Data SheetDocumento4 pagineServo Amplifier VT 1600 Series 3X Data SheetMagno SalgadoNessuna valutazione finora
- Vega EL 11Documento60 pagineVega EL 11shadowNessuna valutazione finora
- L1000A Technical Manual Addendum - YASKAWA AC DriveDocumento89 pagineL1000A Technical Manual Addendum - YASKAWA AC Drivem.alfarez87gmail.comNessuna valutazione finora
- Sanyo SM28DN7CDocumento32 pagineSanyo SM28DN7Ctechols.clNessuna valutazione finora
- Monte Carlo SpiceDocumento13 pagineMonte Carlo Spicetoufik bendibNessuna valutazione finora
- Re 30264Documento8 pagineRe 30264Ismail CivgazNessuna valutazione finora
- Isolated Continuous Conduction Mode Flyback Using The TPS55340Documento16 pagineIsolated Continuous Conduction Mode Flyback Using The TPS55340pietisc pietiscNessuna valutazione finora
- An4050 Stevalisv012v1 Lithiumion Solar Battery Charger StmicroelectronicsDocumento17 pagineAn4050 Stevalisv012v1 Lithiumion Solar Battery Charger Stmicroelectronicsashraf.imraishNessuna valutazione finora
- Ve 20SNDocumento26 pagineVe 20SNVladimirNessuna valutazione finora
- Ps-Fela (Berd) Date TehniceDocumento2 paginePs-Fela (Berd) Date Tehnicecorina_maria_eneNessuna valutazione finora
- CNC SERVO ADJUSTMENT GUIDEDocumento120 pagineCNC SERVO ADJUSTMENT GUIDEAlisson cruzNessuna valutazione finora
- Ispravljačza KočnicuDocumento8 pagineIspravljačza KočnicuAhmet HrustićNessuna valutazione finora
- Sanyo Eb8-A Ce21dn9fDocumento26 pagineSanyo Eb8-A Ce21dn9fvideosonNessuna valutazione finora
- Service Manual LCD Television: Model No. LCD-23XL2Documento32 pagineService Manual LCD Television: Model No. LCD-23XL2FEDE514Nessuna valutazione finora
- Op Amp StabilityDocumento32 pagineOp Amp Stabilityapdim79Nessuna valutazione finora
- NA3 AND NA4 - PARTS LISTING INDEX (p100)Documento20 pagineNA3 AND NA4 - PARTS LISTING INDEX (p100)Julio BacilioNessuna valutazione finora
- IVPAUserGuideDocumento16 pagineIVPAUserGuideYouba FofanaNessuna valutazione finora
- Compressed Air Manual Tcm44-1249312Documento8 pagineCompressed Air Manual Tcm44-1249312Osama Kamel ElghitanyNessuna valutazione finora
- Voltage Reference Scalling Techniques Increase The Accuaracy of The Converter As Well As The ResolutionDocumento6 pagineVoltage Reference Scalling Techniques Increase The Accuaracy of The Converter As Well As The Resolutionmehdi.bzinebNessuna valutazione finora
- FR-E800 Instruction Manual (Function)Documento420 pagineFR-E800 Instruction Manual (Function)Diogo CampezattoNessuna valutazione finora
- Man 8040T NFDocumento38 pagineMan 8040T NFjean bartNessuna valutazione finora
- Cp1w-Ad Da Mad Ts DRT SRT Pages From W471-E1-04Documento70 pagineCp1w-Ad Da Mad Ts DRT SRT Pages From W471-E1-04Juni HartantoNessuna valutazione finora
- Sony-Cpd E220 PDFDocumento34 pagineSony-Cpd E220 PDFyako1511Nessuna valutazione finora
- Rockchip RK3399 IO List V1.5 enDocumento27 pagineRockchip RK3399 IO List V1.5 enXeltar AégisNessuna valutazione finora
- TLC1542C, TLC1542I, TLC1542M, TLC1542Q, TLC1543C, TLC1543I, TLC1543Q 10-Bit Analog-To-Digital Converters With Serial Control and 11 Analog InputsDocumento27 pagineTLC1542C, TLC1542I, TLC1542M, TLC1542Q, TLC1543C, TLC1543I, TLC1543Q 10-Bit Analog-To-Digital Converters With Serial Control and 11 Analog InputsCarlos Alberto de Andrade Freitas JuniorNessuna valutazione finora
- Man 8040M NFDocumento44 pagineMan 8040M NFjean bartNessuna valutazione finora
- DAC ADC Interfacing With 8051Documento37 pagineDAC ADC Interfacing With 8051Gowri100% (1)
- ADC Module Configuration & ChannelsDocumento12 pagineADC Module Configuration & ChannelsAndres CalleNessuna valutazione finora
- 82 Series - Modular Timers 5 ADocumento5 pagine82 Series - Modular Timers 5 Adragos_dimitriuNessuna valutazione finora
- Pulse-Width-Modulation Control Circuits Az7500EDocumento13 paginePulse-Width-Modulation Control Circuits Az7500EMy shop Cool100% (1)
- (11863264) R00 E-S-P Parada de SegurancaDocumento36 pagine(11863264) R00 E-S-P Parada de SegurancaJean da LE Soluções em EnergiaNessuna valutazione finora
- Codigo de FallaDocumento5 pagineCodigo de FallaMarco Yarasca RomeroNessuna valutazione finora
- U209B M AtmelDocumento19 pagineU209B M Atmelyassine yassineNessuna valutazione finora
- LCD SSD1815Documento36 pagineLCD SSD1815vuhongthuy1Nessuna valutazione finora
- Tlm-1903 Service ManualDocumento40 pagineTlm-1903 Service ManualdaldoggyNessuna valutazione finora
- Sanyo EC5-A - ChassisDocumento24 pagineSanyo EC5-A - Chassisivan BarriosNessuna valutazione finora
- PIC18F4550 ADC TutorialDocumento9 paginePIC18F4550 ADC TutorialKrishanu Modak100% (1)
- Sbaa332 PDFDocumento5 pagineSbaa332 PDFAnurag RajakNessuna valutazione finora
- SED1530 Series: Dot Matrix LCD Driver-ControllerDocumento20 pagineSED1530 Series: Dot Matrix LCD Driver-ControllerJuan Carlos BarandicaNessuna valutazione finora
- CAT7105 2.0A High Efficiency Step-Down DC/DC Converter Datasheet SummaryDocumento12 pagineCAT7105 2.0A High Efficiency Step-Down DC/DC Converter Datasheet Summarymonitores culpinaNessuna valutazione finora
- 3 Axis Control Box ManualDocumento12 pagine3 Axis Control Box ManualМарко СајићNessuna valutazione finora
- JVCDocumento26 pagineJVCDaniel CharlesNessuna valutazione finora
- V/I, I/V, V/F, F/V Converters Mod. MCM7A/EV: Volume 1/2 Theory and ExercisesDocumento48 pagineV/I, I/V, V/F, F/V Converters Mod. MCM7A/EV: Volume 1/2 Theory and ExercisesbrzNessuna valutazione finora
- 128K x8 bit 3.3V Low Power CMOS SRAMDocumento12 pagine128K x8 bit 3.3V Low Power CMOS SRAMsmhzzNessuna valutazione finora
- Gdi Uns881 107542Documento11 pagineGdi Uns881 107542Nguyen Duc NhaNessuna valutazione finora
- 1 Electronica IndustrialDocumento17 pagine1 Electronica Industrialjerrygo_03Nessuna valutazione finora
- V1-Using The ADC of 80C552Documento18 pagineV1-Using The ADC of 80C552Dams Ruc100% (1)
- Anais Do Workshop De Micro-ondasDa EverandAnais Do Workshop De Micro-ondasNessuna valutazione finora
- Python Binance Readthedocs Io en LatestDocumento226 paginePython Binance Readthedocs Io en LatestRicardo José ItriagoNessuna valutazione finora
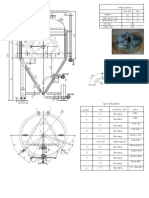
- 400L Jacketed FermenterDocumento1 pagina400L Jacketed FermenterRicardo José ItriagoNessuna valutazione finora
- 1000L Jacketed FermenterDocumento1 pagina1000L Jacketed FermenterRicardo José ItriagoNessuna valutazione finora
- EthernetDocumento3 pagineEthernetRicardo José ItriagoNessuna valutazione finora
- Signal Sampling and Quantization - 1Documento20 pagineSignal Sampling and Quantization - 1Lana AlakhrasNessuna valutazione finora
- Preferred Audio Settings IC-7610 - ON2PCODocumento2 paginePreferred Audio Settings IC-7610 - ON2PCOtester van de testNessuna valutazione finora
- Fundamentals of Equalizers and Linear EqualizersDocumento22 pagineFundamentals of Equalizers and Linear EqualizersThota DeepNessuna valutazione finora
- John Arnold SamsonDocumento5 pagineJohn Arnold SamsonJ Arnold SamsonNessuna valutazione finora
- Service ManualDocumento81 pagineService ManualKiss IstvánNessuna valutazione finora
- Gemini - Amplifier P-700 - Service ManualDocumento12 pagineGemini - Amplifier P-700 - Service Manualapi-3711045100% (2)
- TG-40SP Ultrasonic Directional SpeakerDocumento2 pagineTG-40SP Ultrasonic Directional SpeakermeichengNessuna valutazione finora
- Quad 405 Mk2 Owners ManualDocumento14 pagineQuad 405 Mk2 Owners ManualAnthony IpNessuna valutazione finora
- The Ultimate Roland JV, JD, XV F.A.Q. (Don Solaris)Documento19 pagineThe Ultimate Roland JV, JD, XV F.A.Q. (Don Solaris)CirrusStratusNessuna valutazione finora
- Data CommunicationDocumento17 pagineData CommunicationSnehal KarkiNessuna valutazione finora
- Tutoring Questions 1Documento10 pagineTutoring Questions 1labibasalam0Nessuna valutazione finora
- Common Base Amplifier: CharacteristicsDocumento8 pagineCommon Base Amplifier: CharacteristicsfarhanmadhiNessuna valutazione finora
- Lic Project ReportDocumento9 pagineLic Project ReportJayachandra JVNessuna valutazione finora
- Histogram: CII4F3 / Digital Image ProcessingDocumento61 pagineHistogram: CII4F3 / Digital Image ProcessingAqmal Insan cendekiaNessuna valutazione finora
- Decorative PendantSpeaker Decorative Pendant Inline Speaker DataSheet-G875Documento1 paginaDecorative PendantSpeaker Decorative Pendant Inline Speaker DataSheet-G875ahmad allenNessuna valutazione finora
- HERTZ TechSheet DST30.3B Rev17ADocumento1 paginaHERTZ TechSheet DST30.3B Rev17ARenato de CastroNessuna valutazione finora
- Ads 1299Documento65 pagineAds 1299Adrian QuijijeNessuna valutazione finora
- Quick start guide for VMS ML-2Documento4 pagineQuick start guide for VMS ML-2Mendo KusaiiNessuna valutazione finora
- Natural Radio ReceiverDocumento4 pagineNatural Radio ReceiverFJ GLNessuna valutazione finora
- Filter Design 2Documento0 pagineFilter Design 2www.bhawesh.com.npNessuna valutazione finora
- Lecture 9 2Documento53 pagineLecture 9 2Trường HoàngNessuna valutazione finora
- Design and Implementation of Power Factor Correction (PFC) Converter With Average Current Mode Control Using DSPDocumento4 pagineDesign and Implementation of Power Factor Correction (PFC) Converter With Average Current Mode Control Using DSPPhúc ThiệnNessuna valutazione finora
- Image ImpedanceDocumento16 pagineImage ImpedanceErick Wangila WanyonyiNessuna valutazione finora
- Musical Sound Processing CsetubeDocumento2 pagineMusical Sound Processing CsetubeSara SwathiNessuna valutazione finora