Potrebbero piacerti anche
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentDa EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentNessuna valutazione finora
- Neural Network-Based Adaptive Sliding Mode Control Design For Position and Attitude Control of A Quadrotor UAVDocumento16 pagineNeural Network-Based Adaptive Sliding Mode Control Design For Position and Attitude Control of A Quadrotor UAVdelima palwa sariNessuna valutazione finora
- Fast Adaptive Control Theory for Robust Aircraft SystemsDocumento46 pagineFast Adaptive Control Theory for Robust Aircraft SystemsPhạm Văn TưởngNessuna valutazione finora
- Proof JournalPaper FnuDocumento13 pagineProof JournalPaper FnuIbrahim HasanNessuna valutazione finora
- s12206-024-0234-6Documento14 pagines12206-024-0234-6JyotisMan BorahNessuna valutazione finora
- Chattering-Free Neuro-Sliding Mode Control of 2-DOF Planar Parallel ManipulatorsDocumento15 pagineChattering-Free Neuro-Sliding Mode Control of 2-DOF Planar Parallel ManipulatorsQuyết Nguyễn CôngNessuna valutazione finora
- Smart Traffic Lights That Learn !: of Adaptive Traffic Signal ControllersDocumento20 pagineSmart Traffic Lights That Learn !: of Adaptive Traffic Signal ControllerskaranNessuna valutazione finora
- Adaptive Nonlinear Control of Agile Antiair Missiles Using Neural NetworksDocumento8 pagineAdaptive Nonlinear Control of Agile Antiair Missiles Using Neural NetworksYomar RealpeNessuna valutazione finora
- Pref Ace: 1. Gain Scheduling: in This Method, Typically, The Full OperatingDocumento6 paginePref Ace: 1. Gain Scheduling: in This Method, Typically, The Full OperatingBiplab SatpatiNessuna valutazione finora
- ISA Transactions: M. Rida Mokhtari, Brahim CherkiDocumento16 pagineISA Transactions: M. Rida Mokhtari, Brahim CherkiSaad HadjiNessuna valutazione finora
- Nonlinear Adaptive Flight Control Using Neural NetworksDocumento24 pagineNonlinear Adaptive Flight Control Using Neural NetworksAria IraniNessuna valutazione finora
- Robust Trajectory Tracking Control Design For Nonholonomic Mobile Robot (NMR)Documento6 pagineRobust Trajectory Tracking Control Design For Nonholonomic Mobile Robot (NMR)bilalNessuna valutazione finora
- How Rapid TransferDocumento9 pagineHow Rapid TransferSourabhYadavNessuna valutazione finora
- Proposal For Master Thesis - 16-11Documento16 pagineProposal For Master Thesis - 16-11Ahmed MansourNessuna valutazione finora
- Robust Localization of An Autonomous Underwater Vehicle: A Comparative StudyDocumento7 pagineRobust Localization of An Autonomous Underwater Vehicle: A Comparative Studyspandan_roy_1989Nessuna valutazione finora
- Project Titles For PG Students - June 2014: Department of Electrical Engineering COE PuneDocumento13 pagineProject Titles For PG Students - June 2014: Department of Electrical Engineering COE PuneGrishma TantarpaleNessuna valutazione finora
- H. Saied Et Al, From Non-Model-Based To Model-Based Control of PKMs A Comparative StudyDocumento7 pagineH. Saied Et Al, From Non-Model-Based To Model-Based Control of PKMs A Comparative StudyElleuch DorsafNessuna valutazione finora
- Disturbance Observer-Based Adaptive Tracking Control With Actuator Saturation and Its ApplicationDocumento8 pagineDisturbance Observer-Based Adaptive Tracking Control With Actuator Saturation and Its ApplicationPedro Eusebio AlvaradoNessuna valutazione finora
- Transformation Desing and Operation WorkingDocumento72 pagineTransformation Desing and Operation Workingjohn georgeNessuna valutazione finora
- Lecture - 01 - Introduction & MotivationDocumento21 pagineLecture - 01 - Introduction & MotivationShivan BiradarNessuna valutazione finora
- FFR Technologies PDFDocumento181 pagineFFR Technologies PDFMuhammadNessuna valutazione finora
- A Hybrid PID Control Scheme For Flexible Joint Manipulators and A ComparisonDocumento7 pagineA Hybrid PID Control Scheme For Flexible Joint Manipulators and A Comparisonmuhammet zahit bakışNessuna valutazione finora
- Design and Comparison of Robust Nonlinear Controllers For The Lateral Dynamics of Intelligent Vehicles (Controlador Lateral e I&I)Documento14 pagineDesign and Comparison of Robust Nonlinear Controllers For The Lateral Dynamics of Intelligent Vehicles (Controlador Lateral e I&I)Renan PortoNessuna valutazione finora
- "System Wide Modeling in Fast-Time Simulation" Current and Future CapabilitiesDocumento14 pagine"System Wide Modeling in Fast-Time Simulation" Current and Future CapabilitiesSubhashish RoutNessuna valutazione finora
- Robust Active Disturbance Rejection Control For Flexible Link ManipulatorDocumento18 pagineRobust Active Disturbance Rejection Control For Flexible Link Manipulatorabdelhamid.ghoul93Nessuna valutazione finora
- Open RAN: Is It Destined To Be Closed?: June 15, 2021Documento33 pagineOpen RAN: Is It Destined To Be Closed?: June 15, 2021HumbertoJLaRocheNessuna valutazione finora
- Kadhim 2020 IOP Conf. Ser. Mater. Sci. Eng. 881 012128Documento12 pagineKadhim 2020 IOP Conf. Ser. Mater. Sci. Eng. 881 012128hawicha AbomaNessuna valutazione finora
- Robust Adaptive Control For Mobile Manipulators: International Journal of Automation and Computing February 2011Documento7 pagineRobust Adaptive Control For Mobile Manipulators: International Journal of Automation and Computing February 2011Chandrasekar ElankannanNessuna valutazione finora
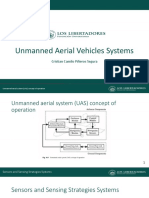
- Unmanned Aerial Vehicles Systems: Cristian Camilo Piñeros SeguraDocumento13 pagineUnmanned Aerial Vehicles Systems: Cristian Camilo Piñeros Seguracristian camilo piñeros seguraNessuna valutazione finora
- Mprest AHM OverviewDocumento17 pagineMprest AHM OverviewLuan NguyenNessuna valutazione finora
- Adaptive Backstepping Fault Tolerant Control For Flexible Spacecraft With Unknown Bounded Disturbances and Actuator Failures 2010 ISA TransactionsDocumento13 pagineAdaptive Backstepping Fault Tolerant Control For Flexible Spacecraft With Unknown Bounded Disturbances and Actuator Failures 2010 ISA TransactionsAravindan MohanNessuna valutazione finora
- An Integral Predictive Nonlinear HinfiniDocumento12 pagineAn Integral Predictive Nonlinear HinfinigabrielberthoNessuna valutazione finora
- L00161 1027Documento21 pagineL00161 1027rajaavikhram37190% (1)
- Adaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural NetworkDocumento10 pagineAdaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural Networkdelima palwa sariNessuna valutazione finora
- Two Link RobotDocumento16 pagineTwo Link RobotselvamNessuna valutazione finora
- Mokhtari 2006Documento22 pagineMokhtari 2006Saad HadjiNessuna valutazione finora
- 1 EE-379 Lecture 01 IntroductionDocumento29 pagine1 EE-379 Lecture 01 IntroductionMuhammad ShaarifNessuna valutazione finora
- Linear Sys Lect1Documento17 pagineLinear Sys Lect1Ali HassanNessuna valutazione finora
- An Approach To Grid Control Engineer Training Using National Occupational StandardsDocumento6 pagineAn Approach To Grid Control Engineer Training Using National Occupational StandardsHamlyn HolderNessuna valutazione finora
- Isatra 4010Documento14 pagineIsatra 4010Franklin Alcarraz AlegriaNessuna valutazione finora
- An Analytical Review On Fpga Based Autonomous Flight Control System For Small UavsDocumento5 pagineAn Analytical Review On Fpga Based Autonomous Flight Control System For Small UavsMahesh MahiNessuna valutazione finora
- Robust Discrete Time Flight Control of UAV With External DisturbsncesDocumento219 pagineRobust Discrete Time Flight Control of UAV With External DisturbsnceszackNessuna valutazione finora
- tnc18 Slides 5 2018-04 - Infinera - OpenLineSystemAndOpenROADM 04Documento17 paginetnc18 Slides 5 2018-04 - Infinera - OpenLineSystemAndOpenROADM 04Andrea ValleNessuna valutazione finora
- Robust Control Theory Workshop Rev2Documento3 pagineRobust Control Theory Workshop Rev2totoler100% (1)
- IEI Journal Print VersionDocumento13 pagineIEI Journal Print Versionspandan_roy_1989Nessuna valutazione finora
- Tsourdos2005 Adaptive Flight Control Design For Nonlinear MissileDocumento10 pagineTsourdos2005 Adaptive Flight Control Design For Nonlinear MissileSaeb AmirAhmadi ChomacharNessuna valutazione finora
- Adaptive Control: An Overview: Intan Zaurah Mat Darus, PHD C23 226, FKM, Utm 016 7616716Documento15 pagineAdaptive Control: An Overview: Intan Zaurah Mat Darus, PHD C23 226, FKM, Utm 016 7616716Muhammad Aliuddin BakarNessuna valutazione finora
- Particle Swarm Optimization For Generating Interpretable Fuzzy Reinforcement PDFDocumento15 pagineParticle Swarm Optimization For Generating Interpretable Fuzzy Reinforcement PDFАржаев ВалентинNessuna valutazione finora
- Editorial Choosing Advanced ControlDocumento9 pagineEditorial Choosing Advanced ControlMohd HamedNessuna valutazione finora
- StateOfArtControlEngineering Kosak2014Documento9 pagineStateOfArtControlEngineering Kosak2014Susana VieiraNessuna valutazione finora
- 2Tue4B Controlo18 Submission 2Documento7 pagine2Tue4B Controlo18 Submission 2Văn Nghĩa NguyễnNessuna valutazione finora
- Review and Classification of Control Systems in Grid Tied InvertersDocumento10 pagineReview and Classification of Control Systems in Grid Tied InvertersmanNessuna valutazione finora
- A Comparison Study of Several Adaptive Control Strategies For Resilient Flight ControlDocumento22 pagineA Comparison Study of Several Adaptive Control Strategies For Resilient Flight ControlJovan BoskovicNessuna valutazione finora
- Classification of Vessel Motion ControlDocumento6 pagineClassification of Vessel Motion ControlNvlArchNessuna valutazione finora
- FRAX150 DS enDocumento8 pagineFRAX150 DS enYan Lin AungNessuna valutazione finora
- International Journal of Computational Fluid DynamicsDocumento11 pagineInternational Journal of Computational Fluid DynamicsJINU CHANDRANNessuna valutazione finora
- Fractional Order PID Controller for Perturbed Load Frequency ControlDocumento13 pagineFractional Order PID Controller for Perturbed Load Frequency Controlshekhar yadavNessuna valutazione finora
- An Anthropomimetic Approach To High Performance TRDocumento11 pagineAn Anthropomimetic Approach To High Performance TRMinh Thắng NguyễnNessuna valutazione finora
- Neural adaptive observer-based sensor and actuator fault detection in nonlinear systemsDocumento13 pagineNeural adaptive observer-based sensor and actuator fault detection in nonlinear systemsHipólito AguilarNessuna valutazione finora
- 2016 - Chen Et Al. - Robust Backstepping Sliding-Mode Control and Observer-Based Fault Estimation For A Quadrotor UDocumento12 pagine2016 - Chen Et Al. - Robust Backstepping Sliding-Mode Control and Observer-Based Fault Estimation For A Quadrotor UMạnh Đỗ ĐứcNessuna valutazione finora
- Tech Horizons 2010Documento171 pagineTech Horizons 2010Philip MumfordNessuna valutazione finora
- Ponnappan - AOARD PowerDocumento18 paginePonnappan - AOARD PowerafosrNessuna valutazione finora
- 2009 AFOSR Strategic PlanDocumento24 pagine2009 AFOSR Strategic PlanafosrNessuna valutazione finora
- 2009 AFOSR Strategic PlanDocumento24 pagine2009 AFOSR Strategic PlanafosrNessuna valutazione finora
- Thompson-EOARD SpaceDocumento15 pagineThompson-EOARD SpaceafosrNessuna valutazione finora
- Pollak - EOARD MaterialsDocumento25 paginePollak - EOARD MaterialsafosrNessuna valutazione finora
- Tech Horizons 2010Documento171 pagineTech Horizons 2010Philip MumfordNessuna valutazione finora
- Tech Horizons 2010Documento171 pagineTech Horizons 2010Philip MumfordNessuna valutazione finora
- Air Force Office of Scientific Research Overview: AFOSR Spring Review 15 March 2011Documento57 pagineAir Force Office of Scientific Research Overview: AFOSR Spring Review 15 March 2011afosrNessuna valutazione finora
- Jata-AOARD MaterialsDocumento17 pagineJata-AOARD MaterialsafosrNessuna valutazione finora
- Lee Charles - Organic Materials ChemistryDocumento40 pagineLee Charles - Organic Materials ChemistryafosrNessuna valutazione finora
- Jata-RSA-Thermal SciencesDocumento28 pagineJata-RSA-Thermal SciencesafosrNessuna valutazione finora
- Birkan - Space Propulsion and PowerDocumento40 pagineBirkan - Space Propulsion and PowerafosrNessuna valutazione finora
- Bonneau - Complex NetworksDocumento53 pagineBonneau - Complex NetworksafosrNessuna valutazione finora
- Harrison - Low DensityDocumento22 pagineHarrison - Low DensityafosrNessuna valutazione finora
- Stargel - Multi-ScaleDocumento82 pagineStargel - Multi-ScaleafosrNessuna valutazione finora
- SAYIR-High TempDocumento24 pagineSAYIR-High TempafosrNessuna valutazione finora
- Lee, Les - Mechanics ofDocumento63 pagineLee, Les - Mechanics ofafosrNessuna valutazione finora
- Seo - FlightDocumento19 pagineSeo - FlightafosrNessuna valutazione finora
- Smith - Flow InteractionsDocumento26 pagineSmith - Flow InteractionsafosrNessuna valutazione finora
- Berman - MolecularDocumento27 pagineBerman - MolecularafosrNessuna valutazione finora
- Gord - CombustionDocumento35 pagineGord - CombustionafosrNessuna valutazione finora
- Schmisseur - AerothermodynamicsDocumento27 pagineSchmisseur - AerothermodynamicsafosrNessuna valutazione finora
- Abate - EOARD AeronauticalDocumento27 pagineAbate - EOARD AeronauticalafosrNessuna valutazione finora
- Dudley - EOARD PhysicsDocumento35 pagineDudley - EOARD PhysicsafosrNessuna valutazione finora
- Fuller - RSA OverviewDocumento10 pagineFuller - RSA OverviewafosrNessuna valutazione finora
- Luginsland - Plasma and Electro-EnergeticDocumento25 pagineLuginsland - Plasma and Electro-EnergeticafosrNessuna valutazione finora
- Nachman - ElectromagneticsDocumento21 pagineNachman - ElectromagneticsafosrNessuna valutazione finora
- Erstfeld - AFOSR Taiwan NanoscienceDocumento29 pagineErstfeld - AFOSR Taiwan NanoscienceafosrNessuna valutazione finora
- Sjogren - Sensing SurveillanceDocumento24 pagineSjogren - Sensing SurveillanceafosrNessuna valutazione finora
- 2010 MaxxForce DT-9-10 DiagnosticDocumento1.329 pagine2010 MaxxForce DT-9-10 Diagnosticbullfly100% (8)
- Oracle Data Integration - An Overview With Emphasis in DW AppDocumento34 pagineOracle Data Integration - An Overview With Emphasis in DW Appkinan_kazuki104Nessuna valutazione finora
- Nord Factory Restore Instructions Edition CDocumento1 paginaNord Factory Restore Instructions Edition CTonino CannavacciuoloNessuna valutazione finora
- Records of Intervention On The Findings of Test Results and Other Forms of AssessmentDocumento10 pagineRecords of Intervention On The Findings of Test Results and Other Forms of AssessmentLea May MagnoNessuna valutazione finora
- Technical Data: Pump NameDocumento6 pagineTechnical Data: Pump Nameسمير البسيونىNessuna valutazione finora
- How To Publish A Package in RDocumento14 pagineHow To Publish A Package in Rtoton1181Nessuna valutazione finora
- FMDS0129Documento49 pagineFMDS0129hhNessuna valutazione finora
- Probability Statistics and Random Processes Third Edition T Veerarajan PDFDocumento3 pagineProbability Statistics and Random Processes Third Edition T Veerarajan PDFbhavyamNessuna valutazione finora
- Vtol Design PDFDocumento25 pagineVtol Design PDFElner CrystianNessuna valutazione finora
- Rodi TestSystem EZSDI1 Iom D603Documento25 pagineRodi TestSystem EZSDI1 Iom D603Ricardo AndradeNessuna valutazione finora
- MSYS-1 0 11-ChangesDocumento3 pagineMSYS-1 0 11-ChangesCyril BerthelotNessuna valutazione finora
- Ikan Di Kepualauan Indo-AustraliaDocumento480 pagineIkan Di Kepualauan Indo-AustraliaDediNessuna valutazione finora
- Exponential & Logarithmic FunctionsDocumento13 pagineExponential & Logarithmic FunctionsRahul SankaranNessuna valutazione finora
- Alpha New Bp12Documento54 pagineAlpha New Bp12AUTO HUBNessuna valutazione finora
- Superconductivity in RH S and PD Se: A Comparative StudyDocumento5 pagineSuperconductivity in RH S and PD Se: A Comparative StudyChithra ArulmozhiNessuna valutazione finora
- Power Theft Identification Using GSM TechnologyDocumento3 paginePower Theft Identification Using GSM TechnologyIJORAT100% (1)
- Sip TrainingDocumento96 pagineSip Trainingronics123Nessuna valutazione finora
- 1.11 CHEM FINAL Chapter 11 Sulfuric AcidDocumento21 pagine1.11 CHEM FINAL Chapter 11 Sulfuric AcidSudhanshuNessuna valutazione finora
- Turbine Buyers Guide - Mick Sagrillo & Ian WoofendenDocumento7 pagineTurbine Buyers Guide - Mick Sagrillo & Ian WoofendenAnonymous xYhjeilnZNessuna valutazione finora
- Module 4 - What Is The Required Rate of ReturnDocumento2 pagineModule 4 - What Is The Required Rate of ReturnEthics BAENessuna valutazione finora
- Network Layer: Computer Networking: A Top Down ApproachDocumento83 pagineNetwork Layer: Computer Networking: A Top Down ApproachMuhammad Bin ShehzadNessuna valutazione finora
- Great Lakes PGDM Interview Access DetailsDocumento1 paginaGreat Lakes PGDM Interview Access DetailsJaswanth konkepudiNessuna valutazione finora
- Practice Workbook LR Method For Addition Subtraction PDFDocumento4 paginePractice Workbook LR Method For Addition Subtraction PDFEsa KhanNessuna valutazione finora
- Geophysical Report Megnatic SurveyDocumento29 pagineGeophysical Report Megnatic SurveyShahzad KhanNessuna valutazione finora
- Determination of Voltage DropDocumento6 pagineDetermination of Voltage DropFahmi CumiNessuna valutazione finora
- A320 CBT Test 1 PDFDocumento107 pagineA320 CBT Test 1 PDFCesarNessuna valutazione finora
- Uncompacted Void Content of Fine Aggregate (As Influenced by Particle Shape, Surface Texture, and Grading)Documento5 pagineUncompacted Void Content of Fine Aggregate (As Influenced by Particle Shape, Surface Texture, and Grading)ROBERTO MIRANDANessuna valutazione finora
- Wartsila CPP PaperDocumento4 pagineWartsila CPP Papergatheringforgardner9550Nessuna valutazione finora
- Blowfish Encryption AlgorithmDocumento3 pagineBlowfish Encryption AlgorithmParkerAllisonNessuna valutazione finora
- ASTM D 1510 - 02 Carbon Black-Iodine Adsorption NumberDocumento7 pagineASTM D 1510 - 02 Carbon Black-Iodine Adsorption Numberalin2005100% (1)