Potrebbero piacerti anche
- Realtime Painterly Rendering For AnimationDocumento6 pagineRealtime Painterly Rendering For Animationcherryjiao1986Nessuna valutazione finora
- Xel Noggit's Log 09-16-09Documento382 pagineXel Noggit's Log 09-16-09theX3LNessuna valutazione finora
- CSG ReportDocumento7 pagineCSG Reportkhalil alhatabNessuna valutazione finora
- CdaDocumento10 pagineCdakinny1974Nessuna valutazione finora
- Convolutional Mesh Regression For Single-Image Human Shape ReconstructionDocumento10 pagineConvolutional Mesh Regression For Single-Image Human Shape Reconstruction7ddv29qw89Nessuna valutazione finora
- GPU-Driven Real-Time Mesh Contour VectorizationDocumento13 pagineGPU-Driven Real-Time Mesh Contour Vectorization王毅Nessuna valutazione finora
- Real-Time 6D Object Pose Estimation On CPU: Yoshinori Konishi, Kosuke Hattori and Manabu HashimotoDocumento8 pagineReal-Time 6D Object Pose Estimation On CPU: Yoshinori Konishi, Kosuke Hattori and Manabu HashimotoNicolas ProuteauNessuna valutazione finora
- Neural Point-Based Graphics: Kara-Ali Aliev, Dmitry Ulyanov, Victor LempitskyDocumento11 pagineNeural Point-Based Graphics: Kara-Ali Aliev, Dmitry Ulyanov, Victor LempitskyChidera UnigweNessuna valutazione finora
- Fast Image Generation of Constructive Solid Geometry Using A Cellular Array ProcessorDocumento8 pagineFast Image Generation of Constructive Solid Geometry Using A Cellular Array ProcessorAnis HadjariNessuna valutazione finora
- Li SECAD-Net Self-Supervised CAD Reconstruction by Learning Sketch-Extrude Operations CVPR 2023 PaperDocumento11 pagineLi SECAD-Net Self-Supervised CAD Reconstruction by Learning Sketch-Extrude Operations CVPR 2023 Paper7knhfwr87wNessuna valutazione finora
- Inferring CAD Modeling Sequences Using Zone Graphs: Input B-Rep Zone GraphDocumento9 pagineInferring CAD Modeling Sequences Using Zone Graphs: Input B-Rep Zone GraphpwzNessuna valutazione finora
- Icalip 2014 7009932Documento5 pagineIcalip 2014 7009932ابراهيم التباعNessuna valutazione finora
- FPGA Implementation of A Simple 3D Graphics PipelineDocumento9 pagineFPGA Implementation of A Simple 3D Graphics PipelineBharat NarumanchiNessuna valutazione finora
- 1.fan - A Point Set Generation Network For 3D Object Reconstruction From A Single Image - CVPR - 2017 - PaperDocumento9 pagine1.fan - A Point Set Generation Network For 3D Object Reconstruction From A Single Image - CVPR - 2017 - PaperxuhangmkNessuna valutazione finora
- Submap-Based Bundle Adjustment For 3D Reconstruction From RGB-D DataDocumento13 pagineSubmap-Based Bundle Adjustment For 3D Reconstruction From RGB-D DataZQQNessuna valutazione finora
- DSP-SLAM: Object Oriented SLAM With Deep Shape PriorsDocumento16 pagineDSP-SLAM: Object Oriented SLAM With Deep Shape PriorsmateNessuna valutazione finora
- Zero-1-To-3: Zero-Shot One Image To 3D ObjectDocumento13 pagineZero-1-To-3: Zero-Shot One Image To 3D ObjectJeremy AhnNessuna valutazione finora
- Tracking of Industrial Objects by Using CAD Models: October 2007Documento10 pagineTracking of Industrial Objects by Using CAD Models: October 2007thanhit08Nessuna valutazione finora
- Geometry Processing For Real-Time Pencil SketchingDocumento8 pagineGeometry Processing For Real-Time Pencil SketchingHồ Văn ChươngNessuna valutazione finora
- 1604 00449 PDFDocumento17 pagine1604 00449 PDF王王金强Nessuna valutazione finora
- (Visualization) Quality-Driven 360 Video ExtrapolationDocumento4 pagine(Visualization) Quality-Driven 360 Video Extrapolationdorientoon40Nessuna valutazione finora
- Progressive Reconstruction of 3D Objects From A Single Free-Hand Line DrawingDocumento12 pagineProgressive Reconstruction of 3D Objects From A Single Free-Hand Line DrawingCyrille LamasséNessuna valutazione finora
- Stylesdf: High-Resolution 3D-Consistent Image and Geometry GenerationDocumento17 pagineStylesdf: High-Resolution 3D-Consistent Image and Geometry GenerationAkhilesh YadavNessuna valutazione finora
- Solid Model DesignDocumento28 pagineSolid Model DesignManish GogoiNessuna valutazione finora
- Unit 2Documento12 pagineUnit 2GGRNessuna valutazione finora
- Edge To Image Reconstruction Using Pix2pix Conditional GanDocumento6 pagineEdge To Image Reconstruction Using Pix2pix Conditional GanSoumya PolisettyNessuna valutazione finora
- 3DMV: Joint 3D-Multi-View Prediction For 3D Semantic Scene SegmentationDocumento20 pagine3DMV: Joint 3D-Multi-View Prediction For 3D Semantic Scene SegmentationIgnacio VizzoNessuna valutazione finora
- 09 - S. Kim, S. Nowozin, P. Kohli, and C. D. Yoo, Higher-Order Correlation Clustering For Image SegmentationDocumento14 pagine09 - S. Kim, S. Nowozin, P. Kohli, and C. D. Yoo, Higher-Order Correlation Clustering For Image SegmentationBruno TondinNessuna valutazione finora
- 3d-Aware Conditional Image Synthesis: Kangle Deng Gengshan Yang Deva Ramanan Jun-Yan Zhu Carnegie Mellon UniversityDocumento15 pagine3d-Aware Conditional Image Synthesis: Kangle Deng Gengshan Yang Deva Ramanan Jun-Yan Zhu Carnegie Mellon Universitypyash2113Nessuna valutazione finora
- Auto Splats: Dynamic Point Cloud Visualization On The GPUDocumento10 pagineAuto Splats: Dynamic Point Cloud Visualization On The GPU张啊康Nessuna valutazione finora
- Learning To Estimate 3D Human Pose and Shape From A Single Color ImageDocumento10 pagineLearning To Estimate 3D Human Pose and Shape From A Single Color ImageSravan ChandraNessuna valutazione finora
- LGM: Large Multi-View Gaussian Model For High-Resolution 3D Content CreationDocumento20 pagineLGM: Large Multi-View Gaussian Model For High-Resolution 3D Content CreationNam NguyenNessuna valutazione finora
- From CAD and RP To Innovative ManufacturDocumento10 pagineFrom CAD and RP To Innovative Manufacturtotenkopf0424Nessuna valutazione finora
- CUDA Implementation of A Biologically Inspired Object Recognition SystemDocumento5 pagineCUDA Implementation of A Biologically Inspired Object Recognition Systemproxymo1Nessuna valutazione finora
- Im High Quality Structure ICCV 2015 PaperDocumento9 pagineIm High Quality Structure ICCV 2015 PaperGhazlan HishamNessuna valutazione finora
- Dual ContourDocumento8 pagineDual ContourunttiitledNessuna valutazione finora
- Pix2Vox Context-Aware 3D Reconstruction From Single and Multi-View ImagesDocumento9 paginePix2Vox Context-Aware 3D Reconstruction From Single and Multi-View ImagesABHIRAJ ENessuna valutazione finora
- Wu Unsupervised Joint 3D Object Model Learning and 6D Pose Estimation ICCVW 2019 PaperDocumento10 pagineWu Unsupervised Joint 3D Object Model Learning and 6D Pose Estimation ICCVW 2019 PaperIbon MerinoNessuna valutazione finora
- GRF: L G R F 3DS R R: Earning A Eneral Adiance Ield For Cene Epresentation and EnderingDocumento28 pagineGRF: L G R F 3DS R R: Earning A Eneral Adiance Ield For Cene Epresentation and EnderingSushobhan GhoshNessuna valutazione finora
- Occupancy Networks: Learning 3D Reconstruction in Function SpaceDocumento11 pagineOccupancy Networks: Learning 3D Reconstruction in Function SpaceIgnacio VizzoNessuna valutazione finora
- Pix2Pose: Pixel-Wise Coordinate Regression of Objects For 6D Pose EstimationDocumento17 paginePix2Pose: Pixel-Wise Coordinate Regression of Objects For 6D Pose Estimation1903237473Nessuna valutazione finora
- Module 1Documento45 pagineModule 1SohanNessuna valutazione finora
- Cuda BasicsDocumento44 pagineCuda BasicssueNessuna valutazione finora
- Diff ShaderDocumento12 pagineDiff Shaderds0313Nessuna valutazione finora
- Coherent Hierarchical Culling: Hardware Occlusion Queries Made UsefulDocumento10 pagineCoherent Hierarchical Culling: Hardware Occlusion Queries Made UsefulAlexx AlexNessuna valutazione finora
- Neural Body Fitting: Unifying Deep Learning and Model-Based Human Pose and Shape EstimationDocumento13 pagineNeural Body Fitting: Unifying Deep Learning and Model-Based Human Pose and Shape EstimationSravan ChandraNessuna valutazione finora
- MPEG-7 Based Spatial Shape Concealment Difficulty: Luis Ducla Soares, Fernando PereiraDocumento5 pagineMPEG-7 Based Spatial Shape Concealment Difficulty: Luis Ducla Soares, Fernando PereiraMuthu Vijay DeepakNessuna valutazione finora
- 1612 00603 PDFDocumento12 pagine1612 00603 PDF王王金强Nessuna valutazione finora
- Zhao, Sandelin - 2012 - GMD Vignette PDFDocumento35 pagineZhao, Sandelin - 2012 - GMD Vignette PDFopigabiNessuna valutazione finora
- Journal of Statistical Software: GGMCMC: Analysis of MCMC Samples and BayesianDocumento20 pagineJournal of Statistical Software: GGMCMC: Analysis of MCMC Samples and Bayesian18rosa18Nessuna valutazione finora
- Final Exam CADCAMFinal 2016FinalAnswersDocumento10 pagineFinal Exam CADCAMFinal 2016FinalAnswerskhalil alhatabNessuna valutazione finora
- Cube-To-Sphere Projections For Procedural Texturing and BeyondDocumento22 pagineCube-To-Sphere Projections For Procedural Texturing and Beyondqrwyy8763876Nessuna valutazione finora
- Depth-Regularized Optimization For 3D Gaussian Splatting in Few-Shot ImagesDocumento10 pagineDepth-Regularized Optimization For 3D Gaussian Splatting in Few-Shot Imagesmarshe386Nessuna valutazione finora
- Foreground Object Segmentation in RGB-D Data Implemented On GPUDocumento12 pagineForeground Object Segmentation in RGB-D Data Implemented On GPUابراهيم التباعNessuna valutazione finora
- Efficient Spatially Sparse Inference For Conditional Gans and Diffusion ModelsDocumento22 pagineEfficient Spatially Sparse Inference For Conditional Gans and Diffusion Models20135A0504 CHAVAKULA VIJAYA RAMA KRISHNANessuna valutazione finora
- Efficient GPU Path Rendering Using Scanline RasterizationDocumento12 pagineEfficient GPU Path Rendering Using Scanline Rasterizationmarco nordiNessuna valutazione finora
- Real-Time Camera Tracking and 3D Reconstruction Using Signed Distance FunctionsDocumento8 pagineReal-Time Camera Tracking and 3D Reconstruction Using Signed Distance FunctionsBinh Pham ThanhNessuna valutazione finora
- A Real World Dataset For Multi-View 3DDocumento18 pagineA Real World Dataset For Multi-View 3D会爆炸的小米NoteNessuna valutazione finora
- Xu DisCoScene Spatially Disentangled Generative Radiance Fields For Controllable 3D-Aware Scene CVPR 2023 PaperDocumento11 pagineXu DisCoScene Spatially Disentangled Generative Radiance Fields For Controllable 3D-Aware Scene CVPR 2023 PaperS Divakar BhatNessuna valutazione finora
- Vector Graphics Editor: Empowering Visual Creation with Advanced AlgorithmsDa EverandVector Graphics Editor: Empowering Visual Creation with Advanced AlgorithmsNessuna valutazione finora
- Raster Graphics Editor: Transforming Visual Realities: Mastering Raster Graphics Editors in Computer VisionDa EverandRaster Graphics Editor: Transforming Visual Realities: Mastering Raster Graphics Editors in Computer VisionNessuna valutazione finora
- Apostila RevitDocumento464 pagineApostila RevitLuis MarcosNessuna valutazione finora
- MS Final DIP 2011 2 PDFDocumento4 pagineMS Final DIP 2011 2 PDFSUNIL KUMARNessuna valutazione finora
- Catalog - Arroway Textures - Stone Volume One (EN) PDFDocumento19 pagineCatalog - Arroway Textures - Stone Volume One (EN) PDFKopopo90Nessuna valutazione finora
- 3D Modeling: Computer SimulationDocumento8 pagine3D Modeling: Computer SimulationGuna SeelanNessuna valutazione finora
- Computer Vision: Edge DetectionDocumento23 pagineComputer Vision: Edge DetectionThịi ÁnhhNessuna valutazione finora
- Chapter 4Documento8 pagineChapter 4bekemaNessuna valutazione finora
- Axonometric and Isometric Drawings: Sabine Pauli Spauli@cityu - Edu.hkDocumento6 pagineAxonometric and Isometric Drawings: Sabine Pauli Spauli@cityu - Edu.hkAliaa Ahmed Shemari0% (1)
- DIP3E Chapter02 ArtDocumento44 pagineDIP3E Chapter02 ArtRishav MishraNessuna valutazione finora
- Geomopholgy MapDocumento1 paginaGeomopholgy MapHamse HusseinNessuna valutazione finora
- Computer Science and Engineering: PreambleDocumento12 pagineComputer Science and Engineering: PreambleAbhinav GNessuna valutazione finora
- GCC-Ward Wise GCC - Zone WiseDocumento5 pagineGCC-Ward Wise GCC - Zone WiseDharmika KowtavarapuNessuna valutazione finora
- Peta Lapangan - Kotak PDFDocumento1 paginaPeta Lapangan - Kotak PDFMuhammad Anugrah FirdausNessuna valutazione finora
- Tip 1Documento2 pagineTip 1marie-joNessuna valutazione finora
- GISخارطة الطريق لتعلم PDFDocumento28 pagineGISخارطة الطريق لتعلم PDFmjd jodyNessuna valutazione finora
- Listado Software Bim 2016-11-08Documento78 pagineListado Software Bim 2016-11-08Gerónimo Sánchez TorresNessuna valutazione finora
- Thresholding in Image ProcessingDocumento21 pagineThresholding in Image ProcessingArushi SrivastavaNessuna valutazione finora
- Introduction To Gis: For Social ScienceDocumento8 pagineIntroduction To Gis: For Social SciencebiyuuNessuna valutazione finora
- Intro ArcgisDocumento16 pagineIntro ArcgisNaresh BabuNessuna valutazione finora
- Radiologist in DelhiDocumento9 pagineRadiologist in DelhishahulNessuna valutazione finora
- 2021 L5 GGY283 Data Models 2Documento19 pagine2021 L5 GGY283 Data Models 2Fanelo FelicityNessuna valutazione finora
- IntroductionDocumento57 pagineIntroductionLeonardo Da Silva CarvalhoNessuna valutazione finora
- B Spline C ImplementationDocumento24 pagineB Spline C ImplementationSnehalNessuna valutazione finora
- Unit 2 Solid ModelingDocumento26 pagineUnit 2 Solid ModelingMohammed Fakhruddin Hasan NizamiNessuna valutazione finora
- MI DAA Bresenham Line DrawingDocumento34 pagineMI DAA Bresenham Line DrawingMazharulislamNessuna valutazione finora
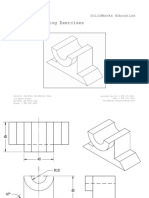
- Detailed Drawing Exercises: Solidworks EducationDocumento51 pagineDetailed Drawing Exercises: Solidworks EducationMajd HusseinNessuna valutazione finora
- 건설회사의 BIM 활용 실태 조사 및 시사점Documento66 pagine건설회사의 BIM 활용 실태 조사 및 시사점박중영Nessuna valutazione finora
- Features Google Sketchup Google Sketchup Pro: SupportDocumento4 pagineFeatures Google Sketchup Google Sketchup Pro: SupportDavorka Frgec-VrančićNessuna valutazione finora
- CBS4004 - Image-Processing-And-Pattern-Recognition - Eth - 1.0 - 66 - CBS4004 - 61 AcpDocumento2 pagineCBS4004 - Image-Processing-And-Pattern-Recognition - Eth - 1.0 - 66 - CBS4004 - 61 Acpcharchit MangalNessuna valutazione finora
- Chapter 10Documento51 pagineChapter 10Imran Basha50% (2)