Potrebbero piacerti anche
- Church Sound BookDocumento43 pagineChurch Sound BookKevin BroussardNessuna valutazione finora
- ENSC3001 - Exam NotesDocumento13 pagineENSC3001 - Exam NotesGeoffreyWanNessuna valutazione finora
- Geometric functions in computer aided geometric designDa EverandGeometric functions in computer aided geometric designNessuna valutazione finora
- Retaining Wall DesignDocumento106 pagineRetaining Wall Designriz2010Nessuna valutazione finora
- QMS MANUAL - QMS MNL 51 001 - R0 - ApprovedDocumento52 pagineQMS MANUAL - QMS MNL 51 001 - R0 - ApprovedOladunni Afolabi100% (3)
- Truss MethodDocumento9 pagineTruss Methodfanion47Nessuna valutazione finora
- FEM BasicDocumento70 pagineFEM Basicformech100% (1)
- JD Jackson Solution Chapter 1 and 2Documento56 pagineJD Jackson Solution Chapter 1 and 2JYOTIPRASAD DEKA100% (1)
- Preface: Gebze Institute of High TechnologyDocumento8 paginePreface: Gebze Institute of High TechnologyOnur Furkan CakıllıNessuna valutazione finora
- Unit 12 Line and Surf'Ace IntegralsDocumento60 pagineUnit 12 Line and Surf'Ace IntegralsRiddhima MukherjeeNessuna valutazione finora
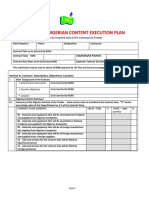
- Attachment IV - Nigeria Content Execution PlanDocumento4 pagineAttachment IV - Nigeria Content Execution PlanOladunni AfolabiNessuna valutazione finora
- Finite Element Method Chapter 4 - The DSMDocumento17 pagineFinite Element Method Chapter 4 - The DSMsteven_gogNessuna valutazione finora
- Financial Proposal TemplateDocumento6 pagineFinancial Proposal TemplateAndile Ntuli100% (1)
- A06 Plate Bending Element With FontsDocumento6 pagineA06 Plate Bending Element With FontsSeyhan ÖzenNessuna valutazione finora
- Attachment Iv - Nigeria Content Execution Plan PDFDocumento4 pagineAttachment Iv - Nigeria Content Execution Plan PDFOladunni Afolabi100% (3)
- Beam Element in FEM/FEADocumento24 pagineBeam Element in FEM/FEAOnkar KakadNessuna valutazione finora
- Shape FunctDocumento46 pagineShape FunctKashmir JamadarNessuna valutazione finora
- 2013-Pump Sizing With Exercises r1Documento25 pagine2013-Pump Sizing With Exercises r1edhy_03Nessuna valutazione finora
- What Are Exegesis, Eisegesis, and Hermeneutics - PDFDocumento5 pagineWhat Are Exegesis, Eisegesis, and Hermeneutics - PDFOladunni Afolabi100% (1)
- MATLAB Project Assembling The Global Stiffness MatrixDocumento16 pagineMATLAB Project Assembling The Global Stiffness MatrixSuneel Kanhar100% (2)
- Beme For DamDocumento5 pagineBeme For DamOladunni Afolabi50% (2)
- Truss Matlab Mef StifnessDocumento8 pagineTruss Matlab Mef StifnessAoun Omar100% (1)
- Mechanics of Solids Week 10 LecturesDocumento9 pagineMechanics of Solids Week 10 LecturesFlynn GouldNessuna valutazione finora
- FEM Exam With SolutionDocumento8 pagineFEM Exam With SolutionArifian Agusta100% (2)
- Analysis of Frames Beams TrussesDocumento17 pagineAnalysis of Frames Beams TrussesRameez AnwarNessuna valutazione finora
- 4500ICBTEGDocumento9 pagine4500ICBTEGKalana wickramanayakaNessuna valutazione finora
- 4 Node QuadDocumento27 pagine4 Node QuadMathiew EstephoNessuna valutazione finora
- 3d TrussDocumento5 pagine3d Trussganesh_withucadNessuna valutazione finora
- 10-Linear Strain Triangle and Other Types of 2d ElementsDocumento31 pagine10-Linear Strain Triangle and Other Types of 2d Elementskranthi142434Nessuna valutazione finora
- Paper 23-A New Type Method For The Structured Variational Inequalities ProblemDocumento4 paginePaper 23-A New Type Method For The Structured Variational Inequalities ProblemEditor IJACSANessuna valutazione finora
- Higher Order Elements: Steps in The Formulation of LST Element Stiffness EquationsDocumento7 pagineHigher Order Elements: Steps in The Formulation of LST Element Stiffness EquationsChatchai ManathamsombatNessuna valutazione finora
- 3D Truss AnalysisDocumento5 pagine3D Truss AnalysisMarco DanielNessuna valutazione finora
- Performance of The Finite Strip Method For Structural Analysis On A Parallel ComputerDocumento14 paginePerformance of The Finite Strip Method For Structural Analysis On A Parallel ComputerFabio OkamotoNessuna valutazione finora
- C 3 C V, V C 3.1 C: Hapter Ontrol Olumes Ector AlculusDocumento10 pagineC 3 C V, V C 3.1 C: Hapter Ontrol Olumes Ector Alculusnanduslns07Nessuna valutazione finora
- Analytical and Numerical Modal Analysis of An Automobile Rear Torsion Beam SuspensionDocumento13 pagineAnalytical and Numerical Modal Analysis of An Automobile Rear Torsion Beam SuspensionMarco DanielNessuna valutazione finora
- Determinants: Ms Do Thi Phuong Thao Fall 2012Documento31 pagineDeterminants: Ms Do Thi Phuong Thao Fall 2012minhthang_hanuNessuna valutazione finora
- Analysis of A Rectangular Waveguide Using Finite Element MethodDocumento9 pagineAnalysis of A Rectangular Waveguide Using Finite Element MethodV'nod Rathode BNessuna valutazione finora
- MANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deDocumento40 pagineMANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu devenky364Nessuna valutazione finora
- FRAMEDocumento209 pagineFRAMELeeCH LeeCHNessuna valutazione finora
- 4curve Fitting TechniquesDocumento32 pagine4curve Fitting TechniquesSubhankarGangulyNessuna valutazione finora
- Buckled Beam Nonlinear VibrationDocumento10 pagineBuckled Beam Nonlinear Vibrationhmsedighi459Nessuna valutazione finora
- Basu-Fem Notes Me623Documento210 pagineBasu-Fem Notes Me623Subhradeep ChatterjeeNessuna valutazione finora
- Hmwk01 APAM4300Documento14 pagineHmwk01 APAM4300Renzo Alexander Montoya MoralesNessuna valutazione finora
- Lecture 2: Review of Vector Calculus: Instructor: Dr. Gleb V. Tcheslavski Contact: Office Hours: Class Web SiteDocumento30 pagineLecture 2: Review of Vector Calculus: Instructor: Dr. Gleb V. Tcheslavski Contact: Office Hours: Class Web Siterkumar_504291Nessuna valutazione finora
- Pre PrintDocumento30 paginePre Printgorot1Nessuna valutazione finora
- Modeling and Mathematical Formulation: 4-1: Finite Element FormulationsDocumento24 pagineModeling and Mathematical Formulation: 4-1: Finite Element FormulationsHusseinali HusseinNessuna valutazione finora
- PEME200001 Mathematical Techniques 2Documento10 paginePEME200001 Mathematical Techniques 2Andrew AndersonNessuna valutazione finora
- Sankar Shil PDFDocumento17 pagineSankar Shil PDFChandra Kishore PaulNessuna valutazione finora
- Chapter 16Documento43 pagineChapter 16German ToledoNessuna valutazione finora
- NP Tel ProblemsDocumento18 pagineNP Tel ProblemsSreedevi KrishnakumarNessuna valutazione finora
- Se130b HW2Documento6 pagineSe130b HW2Yannis KoutromanosNessuna valutazione finora
- Appendix 10 PDFDocumento10 pagineAppendix 10 PDFHusseinali HusseinNessuna valutazione finora
- Finite Element Analysis by S.S. Bhavikatti, New Age Int. (2005)Documento11 pagineFinite Element Analysis by S.S. Bhavikatti, New Age Int. (2005)Ravi Pratap SinghNessuna valutazione finora
- Eigen Value-Stifness MatrixDocumento9 pagineEigen Value-Stifness Matrixumuduma85Nessuna valutazione finora
- Tutorial 5Documento4 pagineTutorial 5NUR ADRIANA FARIESYA BINTI MOHD RIZAIMINessuna valutazione finora
- Symmetry and Bandwidth: AE and Bars 3, 4, 5, and 6Documento11 pagineSymmetry and Bandwidth: AE and Bars 3, 4, 5, and 6Hilary WatsonNessuna valutazione finora
- Jacobi EDODocumento10 pagineJacobi EDOJhon Edison Bravo BuitragoNessuna valutazione finora
- Some Modified Matrix Eigenvalue: E 2 (X), (A I) A (X) - (9) ) - A (A) O'i (A O'2 (A A, (A) 21 (A) 22 (A) 2, (A)Documento17 pagineSome Modified Matrix Eigenvalue: E 2 (X), (A I) A (X) - (9) ) - A (A) O'i (A O'2 (A A, (A) 21 (A) 22 (A) 2, (A)Satyavir YadavNessuna valutazione finora
- Free Vibration of Laminated Plates by A Variable-Kinematic Chebyshev-Ritz MethodDocumento3 pagineFree Vibration of Laminated Plates by A Variable-Kinematic Chebyshev-Ritz MethoddozioNessuna valutazione finora
- SLAM of Multi-Robot System Considering Its Network Topology: H. W. Dong, Z. W. LuoDocumento2 pagineSLAM of Multi-Robot System Considering Its Network Topology: H. W. Dong, Z. W. LuopaperopenaccessNessuna valutazione finora
- LogitDocumento8 pagineLogitRobson GlasscockNessuna valutazione finora
- Symmetry: Modified Jacobi-Gradient Iterative Method For Generalized Sylvester Matrix EquationDocumento15 pagineSymmetry: Modified Jacobi-Gradient Iterative Method For Generalized Sylvester Matrix EquationEDU CIPANANessuna valutazione finora
- Ee 5307 HomeworksDocumento15 pagineEe 5307 HomeworksManoj KumarNessuna valutazione finora
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeDa EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeNessuna valutazione finora
- Difference Equations in Normed Spaces: Stability and OscillationsDa EverandDifference Equations in Normed Spaces: Stability and OscillationsNessuna valutazione finora
- A Course of Mathematics for Engineers and ScientistsDa EverandA Course of Mathematics for Engineers and ScientistsNessuna valutazione finora
- 29.00 Design Procedures For C and C v19Documento11 pagine29.00 Design Procedures For C and C v19Oladunni AfolabiNessuna valutazione finora
- Building A Change Management OfficeDocumento7 pagineBuilding A Change Management OfficeOladunni AfolabiNessuna valutazione finora
- How To Calculate Bearing Capacity of Soil From Plate Load TestDocumento14 pagineHow To Calculate Bearing Capacity of Soil From Plate Load TestOladunni AfolabiNessuna valutazione finora
- The Role of Transaction Advisers in A PPP Project PDFDocumento15 pagineThe Role of Transaction Advisers in A PPP Project PDFOladunni AfolabiNessuna valutazione finora
- Loop 202 Preliminary Design Public Input Meeting Report Presentation Boards Appendix GDocumento6 pagineLoop 202 Preliminary Design Public Input Meeting Report Presentation Boards Appendix GOladunni AfolabiNessuna valutazione finora
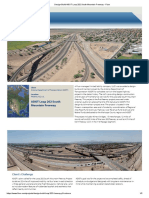
- Design-Build ADOT Loop 202 South Mountain Freeway - FluorDocumento2 pagineDesign-Build ADOT Loop 202 South Mountain Freeway - FluorOladunni AfolabiNessuna valutazione finora
- 06-GB Moment ConnectionsDocumento16 pagine06-GB Moment ConnectionscblerNessuna valutazione finora
- Kogi Water Layout New PDFDocumento1 paginaKogi Water Layout New PDFOladunni AfolabiNessuna valutazione finora
- The Role of Transaction Advisers in A PPP Project PDFDocumento15 pagineThe Role of Transaction Advisers in A PPP Project PDFOladunni AfolabiNessuna valutazione finora
- Wire Size and Amp Ratings PDFDocumento3 pagineWire Size and Amp Ratings PDFOladunni AfolabiNessuna valutazione finora
- Planning Commision - Model-RFQDocumento93 paginePlanning Commision - Model-RFQPradeep Reddy BoppidiNessuna valutazione finora
- 3.3kw Solar Array Support StructureDocumento6 pagine3.3kw Solar Array Support StructureOladunni AfolabiNessuna valutazione finora
- Traffic Parameter DefinitionsDocumento1 paginaTraffic Parameter DefinitionsOladunni AfolabiNessuna valutazione finora
- Audit Report 2013-11 - Public Works - Construction Contracts Review (AUD14003) (City Wide)Documento7 pagineAudit Report 2013-11 - Public Works - Construction Contracts Review (AUD14003) (City Wide)Oladunni AfolabiNessuna valutazione finora
- Design Parameters For Longitudinal Bars (Beams - BS 8110)Documento3 pagineDesign Parameters For Longitudinal Bars (Beams - BS 8110)Oladunni AfolabiNessuna valutazione finora
- Sector Insights: Skills and Performance Challenges in The Energy SectorDocumento13 pagineSector Insights: Skills and Performance Challenges in The Energy SectorOladunni AfolabiNessuna valutazione finora
- VarshaB SessionVII 29dec2006 PDFDocumento20 pagineVarshaB SessionVII 29dec2006 PDFOladunni AfolabiNessuna valutazione finora
- Admin Block ElevationDocumento1 paginaAdmin Block ElevationOladunni AfolabiNessuna valutazione finora
- Fighting Sexual TemptationsDocumento27 pagineFighting Sexual TemptationsOladunni AfolabiNessuna valutazione finora
- Automated Computerized GarageDocumento1 paginaAutomated Computerized GarageOladunni AfolabiNessuna valutazione finora
- Admin Block-Floors PlansDocumento1 paginaAdmin Block-Floors PlansOladunni AfolabiNessuna valutazione finora