Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Leaving The Matrix - EbookDocumento214 pagineLeaving The Matrix - EbookNina100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Encyclopedia of Early Modern Philosophy and The SciencesDocumento2.267 pagineEncyclopedia of Early Modern Philosophy and The SciencesThe Literary BudNessuna valutazione finora
- Questions in Shipman and Tillery BookDocumento65 pagineQuestions in Shipman and Tillery BookEpoy100% (2)
- 583-2 PDFDocumento48 pagine583-2 PDFWai YanNessuna valutazione finora
- Elasticity: L L, L LDocumento8 pagineElasticity: L L, L LaassNessuna valutazione finora
- 4Documento6 pagine4ruydegatreNessuna valutazione finora
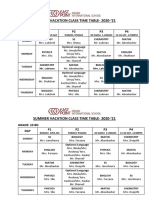
- Summer Vacation Class Time TableDocumento3 pagineSummer Vacation Class Time TableAsraar BudyeNessuna valutazione finora
- Relation Between Difference OperatorsDocumento8 pagineRelation Between Difference OperatorsS AdilakshmiNessuna valutazione finora
- Omega Bright Steel: Test CertificateDocumento1 paginaOmega Bright Steel: Test CertificateBHUSHANNessuna valutazione finora
- Som Notes Vivek Gupta 22.6.22-1-InvertDocumento616 pagineSom Notes Vivek Gupta 22.6.22-1-InvertAnkush rajNessuna valutazione finora
- Consol 71 FC: 2-Part Thixotropic Multipurpose Epoxy AdhesiveDocumento2 pagineConsol 71 FC: 2-Part Thixotropic Multipurpose Epoxy AdhesiveMuhammad FirdausNessuna valutazione finora
- 2.9 - Exponential Functions and The Natural Exponential Filled inDocumento3 pagine2.9 - Exponential Functions and The Natural Exponential Filled injpaim1008Nessuna valutazione finora
- 3rd Periodical Test 2018 2019Documento44 pagine3rd Periodical Test 2018 2019rhocelNessuna valutazione finora
- Toefl Reading GDocumento82 pagineToefl Reading GGilang Satia LaksanaNessuna valutazione finora
- P 6Documento4 pagineP 6Mark Joseph MalaluanNessuna valutazione finora
- Design and Motion Control of Autonomous Underwater Vehicle AmoghDocumento9 pagineDesign and Motion Control of Autonomous Underwater Vehicle AmoghSuman SahaNessuna valutazione finora
- Free Electron TheoryDocumento68 pagineFree Electron TheoryV Sree Suswara SuswaraNessuna valutazione finora
- Sarmand 1Documento19 pagineSarmand 1Saroo MusicNessuna valutazione finora
- BEARD, R. Quadrotor Dynamics and Control. Brigham Young University, 2008 - Rev 0.1Documento48 pagineBEARD, R. Quadrotor Dynamics and Control. Brigham Young University, 2008 - Rev 0.1Wanderson TeotonioNessuna valutazione finora
- Power System StabilityDocumento6 paginePower System StabilitypriyansNessuna valutazione finora
- Entropy Changes in Reversible Processes PDFDocumento9 pagineEntropy Changes in Reversible Processes PDFZenghu HanNessuna valutazione finora
- Oiml R 137-1 & - 2 2009Documento55 pagineOiml R 137-1 & - 2 2009Marco VeraNessuna valutazione finora
- Lec 1 Introduction 19 Series EEE 2205Documento22 pagineLec 1 Introduction 19 Series EEE 2205Nasif TahmidNessuna valutazione finora
- Creep Behavior of Type 310 Stainless Steel. Part 1: Parameters From The Norton, Arrhenius and Monkman-Grant RelationsDocumento13 pagineCreep Behavior of Type 310 Stainless Steel. Part 1: Parameters From The Norton, Arrhenius and Monkman-Grant Relationssezgin bayramNessuna valutazione finora
- NEW Atlanta Permaline 2019Documento2 pagineNEW Atlanta Permaline 2019gregNessuna valutazione finora
- Mechanical EngineeringDocumento21 pagineMechanical EngineeringmayurNessuna valutazione finora
- The Breath of A Dog - An Example of The Trigonometric FunctionsDocumento2 pagineThe Breath of A Dog - An Example of The Trigonometric FunctionsJavierxd1Nessuna valutazione finora
- Nessie and Noctilucent CloudsDocumento21 pagineNessie and Noctilucent CloudsOliver D. SmithNessuna valutazione finora
- Pa6 GF30 - Basf Ultramid B3WG6Documento2 paginePa6 GF30 - Basf Ultramid B3WG6armandoNessuna valutazione finora
- CV - Madhavarao KulkarniDocumento6 pagineCV - Madhavarao KulkarniMadhavarao KulkarniNessuna valutazione finora