Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- CNCmakers 1000M Milling CNC Controller User ManualDocumento360 pagineCNCmakers 1000M Milling CNC Controller User ManualKristijan ApicNessuna valutazione finora
- FlashCut CNC 3.0 Users GuideDocumento195 pagineFlashCut CNC 3.0 Users GuideYamith GomezNessuna valutazione finora
- Sharpcut Operating ManualDocumento69 pagineSharpcut Operating Manualcoyoteassasin0% (1)
- L4 TA202A NC ProgrammingDocumento28 pagineL4 TA202A NC ProgrammingJiya YadavNessuna valutazione finora
- Arb 4x4 Accessories 1 Arb Product Catalogue 2015 PDFDocumento188 pagineArb 4x4 Accessories 1 Arb Product Catalogue 2015 PDFMeigallomanNessuna valutazione finora
- IDslDocumento404 pagineIDslFacundo Ompré100% (1)
- Cncdrivesbrochure WebDocumento16 pagineCncdrivesbrochure Webpc100xohmNessuna valutazione finora
- CNC MachineDocumento18 pagineCNC MachineRajeev Ranjan100% (1)
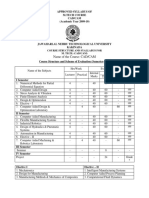
- JNTU Kakinada M.tech CAD-CAM SyllabusDocumento18 pagineJNTU Kakinada M.tech CAD-CAM SyllabusTony AryanNessuna valutazione finora
- Shapeoko XXL Assembly GuideDocumento71 pagineShapeoko XXL Assembly GuideMaja i Aleksandar JovanovićNessuna valutazione finora
- Genmitsu - 4030XLPROVer MANUALv1.01Documento39 pagineGenmitsu - 4030XLPROVer MANUALv1.01abunom48Nessuna valutazione finora
- Iron Product Industries ReportDocumento3 pagineIron Product Industries ReportanthonyNessuna valutazione finora
- Essi 2 EiaDocumento7 pagineEssi 2 EiaagnisivadasanNessuna valutazione finora
- G-Code - Wikipedia, The Free EncyclopediaDocumento6 pagineG-Code - Wikipedia, The Free EncyclopediajoydeepNessuna valutazione finora
- Meat Grinder ReportDocumento10 pagineMeat Grinder Reportadem3521Nessuna valutazione finora
- Dugard BrochureDocumento16 pagineDugard Brochurepc100xohmNessuna valutazione finora
- CNC Milling Advantage & ConclusionDocumento2 pagineCNC Milling Advantage & ConclusionSlim ShaddysNessuna valutazione finora
- A Smart Assistive Computer Numerical Control System For Visually Impaired People To Learn WritingDocumento5 pagineA Smart Assistive Computer Numerical Control System For Visually Impaired People To Learn WritingTrolls TrollyouthsNessuna valutazione finora
- w12 Series 4 Rolls Hydraulic CNC Rolling MachineDocumento8 paginew12 Series 4 Rolls Hydraulic CNC Rolling MachineMarishal Van DititchNessuna valutazione finora
- CNC Programing Guide For TurningDocumento58 pagineCNC Programing Guide For TurningbutindersinghNessuna valutazione finora
- WinDNC - V05 - 01 English PDFDocumento2 pagineWinDNC - V05 - 01 English PDFJoySalinasNessuna valutazione finora
- Vrste CNC Masina PDFDocumento9 pagineVrste CNC Masina PDFveljko82Nessuna valutazione finora
- Cimatron - CAD/CAM Solution For Die MakingDocumento20 pagineCimatron - CAD/CAM Solution For Die MakingMrLanternNessuna valutazione finora
- Camworks 2015 InfoDocumento36 pagineCamworks 2015 InfoWalter AguirreNessuna valutazione finora
- 1 Exercise - FANUCDocumento175 pagine1 Exercise - FANUCdickyohhimNessuna valutazione finora
- CammDocumento177 pagineCammbrar352Nessuna valutazione finora
- Takisawa Japan TPS Series Machine Catalogue - February 2016Documento11 pagineTakisawa Japan TPS Series Machine Catalogue - February 2016renatoeliege100% (2)
- Lecture 7 - Numerical Control - CH 7Documento25 pagineLecture 7 - Numerical Control - CH 7RaghuNessuna valutazione finora
- Anilam 3000M CNC 70000499fDocumento126 pagineAnilam 3000M CNC 70000499fAnonymous iYKTkmhpZNessuna valutazione finora
- AUGUST 2019 Surplus Record Machinery & Equipment DirectoryDocumento717 pagineAUGUST 2019 Surplus Record Machinery & Equipment DirectorySurplus RecordNessuna valutazione finora