Potrebbero piacerti anche
- Practical Machinery Vibration Analysis and Predictive MaintenanceDa EverandPractical Machinery Vibration Analysis and Predictive MaintenanceValutazione: 4.5 su 5 stelle4.5/5 (10)
- Ultrasonic Distance Measurement With The MSP430: Murugavel Raju Mixed Signal ProcessorsDocumento18 pagineUltrasonic Distance Measurement With The MSP430: Murugavel Raju Mixed Signal Processorsbadu51Nessuna valutazione finora
- Spectrum Requirement Planning in Wireless Communications: Model and Methodology for IMT - AdvancedDa EverandSpectrum Requirement Planning in Wireless Communications: Model and Methodology for IMT - AdvancedHideaki TakagiNessuna valutazione finora
- msp430 Controller Ultrasonic Distance MeasurmentDocumento45 paginemsp430 Controller Ultrasonic Distance Measurmentchandre100% (3)
- Deep Space Optical CommunicationsDa EverandDeep Space Optical CommunicationsHamid HemmatiNessuna valutazione finora
- Ultrasonic Distance Measurement With The MSP430Documento18 pagineUltrasonic Distance Measurement With The MSP430lgrome73Nessuna valutazione finora
- GSM - Architecture, Protocols and ServicesDa EverandGSM - Architecture, Protocols and ServicesValutazione: 1 su 5 stelle1/5 (1)
- Superheterodyne PDFDocumento21 pagineSuperheterodyne PDFThế Dân TrầnNessuna valutazione finora
- Mehr FatimaDocumento18 pagineMehr FatimaDavi NathanNessuna valutazione finora
- Acoustic SensorsDocumento106 pagineAcoustic Sensorshamadaxx2000Nessuna valutazione finora
- Experiment 1 Spectrum AnalyzerDocumento23 pagineExperiment 1 Spectrum AnalyzerTumzangwanaNessuna valutazione finora
- Echolocation and Blind Navigation System: Mini Project ReportDocumento29 pagineEcholocation and Blind Navigation System: Mini Project Reportlekshmidevi mNessuna valutazione finora
- Super-Regenerative Receiver For UWB-FM Rui - Hou - 2008 PDFDocumento136 pagineSuper-Regenerative Receiver For UWB-FM Rui - Hou - 2008 PDFjbranthooverNessuna valutazione finora
- High Performance Multi-Channel High-Speed IO Circuits PDFDocumento91 pagineHigh Performance Multi-Channel High-Speed IO Circuits PDFVăn CôngNessuna valutazione finora
- Autocorrelation of An Ultrashort Laser Pulse To Determine Its DurationDocumento26 pagineAutocorrelation of An Ultrashort Laser Pulse To Determine Its DurationMirelly FerreiraNessuna valutazione finora
- ITU Spec-PsophometerDocumento17 pagineITU Spec-PsophometerWerner JakobusNessuna valutazione finora
- Design of A Metal DetectorDocumento56 pagineDesign of A Metal DetectorKireNessuna valutazione finora
- Radar Systems & Applications: Department of Ece, Pesit-BscDocumento18 pagineRadar Systems & Applications: Department of Ece, Pesit-BscvivekallcoolNessuna valutazione finora
- Evaluation of Real-Time Noise Classifier Based On CNN-LSTM and MFCC For SmartphonesDocumento66 pagineEvaluation of Real-Time Noise Classifier Based On CNN-LSTM and MFCC For SmartphonesWin RoedilyNessuna valutazione finora
- Atcor3 Manual PDFDocumento263 pagineAtcor3 Manual PDFAnonymous cC2VeA9MBNessuna valutazione finora
- ISC NIRScan User Manual - EN - V1.1Documento55 pagineISC NIRScan User Manual - EN - V1.1bexepac929100% (1)
- CAS Beam Instrumentation BookletDocumento186 pagineCAS Beam Instrumentation Bookletabr6ls4heNessuna valutazione finora
- ECE 5525FinalProjectDocDocumento12 pagineECE 5525FinalProjectDocRamkumar ThiruvenkadamNessuna valutazione finora
- Project Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwariDocumento3 pagineProject Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwariSuraj UpadhyayNessuna valutazione finora
- LT-2900 - Double Beam Instruction ManualDocumento23 pagineLT-2900 - Double Beam Instruction Manualsaurabh shukla100% (1)
- Low-Noise Amplifier Design and Optimization: Master'S ThesisDocumento0 pagineLow-Noise Amplifier Design and Optimization: Master'S Thesisjitu123456789Nessuna valutazione finora
- Ultrasonic Sensing BasicsDocumento15 pagineUltrasonic Sensing BasicsEdsonNessuna valutazione finora
- UV-2800 Series Spectrophotometer: User's ManualDocumento47 pagineUV-2800 Series Spectrophotometer: User's ManualAngelaNessuna valutazione finora
- Carey Thesis 2017Documento70 pagineCarey Thesis 2017atalasa-1Nessuna valutazione finora
- Distributed Rayleigh Sensing: Xinyu FanDocumento50 pagineDistributed Rayleigh Sensing: Xinyu FanFelipe Alejandro Muñoz CarmonaNessuna valutazione finora
- Acquisition of Seismic Data Using Wiener FilterDocumento26 pagineAcquisition of Seismic Data Using Wiener FilterVijay Seshu RNessuna valutazione finora
- Interference Rejection Combining System PerformanceDocumento73 pagineInterference Rejection Combining System PerformanceumeraftabranaNessuna valutazione finora
- Ultrasonic Sensing Basics: Application ReportDocumento15 pagineUltrasonic Sensing Basics: Application Reportkundu.banhimitraNessuna valutazione finora
- MatlabDocumento113 pagineMatlabMadhumitha MNessuna valutazione finora
- 00849A Spectrum Monitoring Techniques ANDocumento28 pagine00849A Spectrum Monitoring Techniques ANchuzv11Nessuna valutazione finora
- Atcor3 Tutorial PDFDocumento36 pagineAtcor3 Tutorial PDFGongNessuna valutazione finora
- SES 2000 Instruction ManualDocumento38 pagineSES 2000 Instruction Manualxuantruong0212Nessuna valutazione finora
- Mazin ThesisDocumento179 pagineMazin ThesisAndrew JaffeNessuna valutazione finora
- IC-TGD-100 User's ManualDocumento29 pagineIC-TGD-100 User's ManualJboy SchlossNessuna valutazione finora
- Book Title: Cognitive Radio NetworksDocumento37 pagineBook Title: Cognitive Radio NetworkslaerciomosNessuna valutazione finora
- Di Trocchio SpecialisticaDocumento101 pagineDi Trocchio SpecialisticabaymanNessuna valutazione finora
- Ultrasonic Transducers Technical NotesDocumento11 pagineUltrasonic Transducers Technical NotesBelaliaNessuna valutazione finora
- Manual 25 RadarDocumento54 pagineManual 25 RadarKalashnikov GCG GeofísicaNessuna valutazione finora
- MATLAB BASED SPECAN AlgorithmDocumento91 pagineMATLAB BASED SPECAN Algorithmnaivedya_mishra0% (1)
- Multilayer Integrated Film Bulk Acoustic Resonators - Yafei Zhang, Da ChenDocumento158 pagineMultilayer Integrated Film Bulk Acoustic Resonators - Yafei Zhang, Da ChenSasaNessuna valutazione finora
- Dark Fiber: Evaluation With OTDRDocumento17 pagineDark Fiber: Evaluation With OTDRАлексей Лагунов100% (1)
- Sound CaptureDocumento278 pagineSound CaptureJulio Gándara GarcíaNessuna valutazione finora
- Aer403 Lab Manual Rev1.3Documento34 pagineAer403 Lab Manual Rev1.3Urshia Likes CookiesNessuna valutazione finora
- Final Report Complete PDFDocumento26 pagineFinal Report Complete PDFsudeendraNessuna valutazione finora
- Project Report. DSDocumento9 pagineProject Report. DSHassaan YousafNessuna valutazione finora
- Pfeiffer DRDocumento105 paginePfeiffer DRloaizaleoNessuna valutazione finora
- Wu2013 PDFDocumento198 pagineWu2013 PDFKarima Ben salahNessuna valutazione finora
- An 1405-1 PDFDocumento28 pagineAn 1405-1 PDFjinterpaulNessuna valutazione finora
- Acoustic SensorsDocumento107 pagineAcoustic SensorsSuman MandalNessuna valutazione finora
- AN Spectrum Analyzers For EMC TestingDocumento18 pagineAN Spectrum Analyzers For EMC Testingchuku7Nessuna valutazione finora
- UTG-2800 2018 BookletDocumento31 pagineUTG-2800 2018 BookletQAMAR ALI KHANNessuna valutazione finora
- Project Ultrasonic Range FinderDocumento7 pagineProject Ultrasonic Range FinderSufiyan SiddiqueNessuna valutazione finora
- ThesisDocumento59 pagineThesiseuler.amNessuna valutazione finora
- STEPS User ManualDocumento53 pagineSTEPS User ManualAndres PaezNessuna valutazione finora
- User's Manual: Riga 2017Documento70 pagineUser's Manual: Riga 2017sinyor deliNessuna valutazione finora
- MHDV2262-04 Fuente Ob2273Documento64 pagineMHDV2262-04 Fuente Ob2273Andres AlegriaNessuna valutazione finora
- Module4.Etching - Ee143 f14.CtnDocumento20 pagineModule4.Etching - Ee143 f14.CtnstansilawNessuna valutazione finora
- TM1651 V1.1 enDocumento12 pagineTM1651 V1.1 enPriyanka ShanmugamNessuna valutazione finora
- Vlsi Physical Design PDFDocumento41 pagineVlsi Physical Design PDFParul TrivediNessuna valutazione finora
- ECE 372 - Chap14Documento65 pagineECE 372 - Chap14amritaeceNessuna valutazione finora
- Exam Questions-Section 1Documento38 pagineExam Questions-Section 1Gecca VergaraNessuna valutazione finora
- CatalogDocumento34 pagineCatalogccvvbbnnNessuna valutazione finora
- CG-428 - 06 TransistorsDocumento17 pagineCG-428 - 06 TransistorsMark ClementsNessuna valutazione finora
- Project Report On Speed Control of DC Motor by Using PWM TechniqueDocumento75 pagineProject Report On Speed Control of DC Motor by Using PWM Techniquepandyamech80% (15)
- Intrinsic Safety MaintenanceDocumento2 pagineIntrinsic Safety MaintenanceRoadieNessuna valutazione finora
- Quantification of Ion Migration in CH NH Pbi Perovskite Solar Cells by Transient Capacitance MeasurementsDocumento37 pagineQuantification of Ion Migration in CH NH Pbi Perovskite Solar Cells by Transient Capacitance MeasurementsAbhinav PaikNessuna valutazione finora
- TH-42PD50U Plasma Training CourseDocumento85 pagineTH-42PD50U Plasma Training CourseElmer ChristoperNessuna valutazione finora
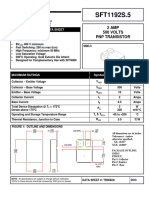
- SFT1192S.5: Solid State Devices, IncDocumento2 pagineSFT1192S.5: Solid State Devices, IncIPUNK PURNOMONessuna valutazione finora
- Philips Lumileds: IESNA LM-80 Test ReportDocumento25 paginePhilips Lumileds: IESNA LM-80 Test ReportR A ArunkrishnanNessuna valutazione finora
- Max1909 Max8725Documento30 pagineMax1909 Max8725Juan CarlosNessuna valutazione finora
- Polycab Wires PVT LTD: HT Xlpe CablesDocumento18 paginePolycab Wires PVT LTD: HT Xlpe Cablesmohit616Nessuna valutazione finora
- Wharfedale TITAN SUB-A12 - 1-400wDocumento13 pagineWharfedale TITAN SUB-A12 - 1-400wNguyễn Quang TrânNessuna valutazione finora
- PAL007A Pioneer PDFDocumento1 paginaPAL007A Pioneer PDFWillian Jose Rosas MartinezNessuna valutazione finora
- Analog Communications Laboratory (Documento5 pagineAnalog Communications Laboratory (shivam007Nessuna valutazione finora
- Diode Resistance & Diode Equivalent CircuitsDocumento42 pagineDiode Resistance & Diode Equivalent Circuitsgirishkumardarisi254Nessuna valutazione finora
- Basic Silicone Chemistry P 1Documento21 pagineBasic Silicone Chemistry P 1Rahul Yadav100% (1)
- LM 395Documento20 pagineLM 395Baixista Sapiens NeanderthalensisNessuna valutazione finora
- Slim TV Service Manual - Sy33 ChassisDocumento45 pagineSlim TV Service Manual - Sy33 ChassisUmar MajeedNessuna valutazione finora
- Jinko Mono 340wDocumento2 pagineJinko Mono 340wDiego Alejandro CampoNessuna valutazione finora
- Aluminum Lithium Alloy Welding Process FeaturesDocumento82 pagineAluminum Lithium Alloy Welding Process FeaturesMitone DiazNessuna valutazione finora
- Chip Finish Icc TCLDocumento5 pagineChip Finish Icc TCLgenx142Nessuna valutazione finora
- SLS11Documento27 pagineSLS11maneeshNessuna valutazione finora
- Multistage Amplifier Lab ReportDocumento10 pagineMultistage Amplifier Lab ReportasifNessuna valutazione finora
- 1909 WFDocumento71 pagine1909 WFBob HazNessuna valutazione finora
- Week 9 - Ceramic Matrix CompositeDocumento31 pagineWeek 9 - Ceramic Matrix Compositewani75% (4)