Potrebbero piacerti anche
- The Physical Basis of Electronics: An Introductory CourseDa EverandThe Physical Basis of Electronics: An Introductory CourseNessuna valutazione finora
- A Study of Ferroresonant Conditions On Distribution Circuits InvoDocumento80 pagineA Study of Ferroresonant Conditions On Distribution Circuits InvoModestoNessuna valutazione finora
- Motor-Driven Boiler Feed Pumps in Today'S: Economic Cofi - Flarison of The Constant and Variable SpeedDocumento69 pagineMotor-Driven Boiler Feed Pumps in Today'S: Economic Cofi - Flarison of The Constant and Variable SpeedLong Nguyễn HoàngNessuna valutazione finora
- Capacitor Discharges - Magnetohydrodynamics - X-Rays - UltrasonicsDa EverandCapacitor Discharges - Magnetohydrodynamics - X-Rays - UltrasonicsValutazione: 5 su 5 stelle5/5 (1)
- LD5655.V855 1959.g673-TextbookDocumento64 pagineLD5655.V855 1959.g673-Textbookrajagopal gNessuna valutazione finora
- A Method For Studying Sequential Faults On A Three Phase DistribuDocumento73 pagineA Method For Studying Sequential Faults On A Three Phase DistribuwasimwalayatNessuna valutazione finora
- A LORAN-C Antenna Coupling Unit.Documento72 pagineA LORAN-C Antenna Coupling Unit.Arindam ChakrabortyNessuna valutazione finora
- Infinite Beams On An Elastic Foundation Infinite Beams On An Elastic FoundationDocumento46 pagineInfinite Beams On An Elastic Foundation Infinite Beams On An Elastic FoundationJonny LeeNessuna valutazione finora
- Flexible Power Transmission: The HVDC OptionsDa EverandFlexible Power Transmission: The HVDC OptionsValutazione: 5 su 5 stelle5/5 (1)
- The Design of Three-Port Strip Line CirculatorDocumento43 pagineThe Design of Three-Port Strip Line CirculatorAranga NadinNessuna valutazione finora
- Antennas - Markov - 1958Documento521 pagineAntennas - Markov - 1958Samuel ChavesNessuna valutazione finora
- Theory of Microwave Valves: International Series of Monographs on Electronics and InstrumentationDa EverandTheory of Microwave Valves: International Series of Monographs on Electronics and InstrumentationNessuna valutazione finora
- Seri/tr 731 587Documento43 pagineSeri/tr 731 587Sandeep SharmaNessuna valutazione finora
- These - Torsion Box Girder PDFDocumento167 pagineThese - Torsion Box Girder PDFtarekhocineNessuna valutazione finora
- Construction Exe 09 August SR I 2010 Module StringingDocumento206 pagineConstruction Exe 09 August SR I 2010 Module StringingQvixote Eléctrico100% (5)
- Application of The Photoelastic Coating Method To Evaluate The ST PDFDocumento51 pagineApplication of The Photoelastic Coating Method To Evaluate The ST PDFFakhre AlamNessuna valutazione finora
- Ac GeneratorDocumento43 pagineAc GeneratorHari RuthreshwarNessuna valutazione finora
- Correlation of Weir Crest Depth Froude Number H - P Ratio Weir TDocumento90 pagineCorrelation of Weir Crest Depth Froude Number H - P Ratio Weir Tjo-an gidoNessuna valutazione finora
- Vdoc - Pub Electromagnetic Fields in Electrical EngineeringDocumento305 pagineVdoc - Pub Electromagnetic Fields in Electrical EngineeringFaisal JavaidNessuna valutazione finora
- Griffin 008934282Documento85 pagineGriffin 008934282Aneesh PrabhakaranNessuna valutazione finora
- ASTMD7264 FlexuralCompDocumento194 pagineASTMD7264 FlexuralCompDaniel Maldonado ForinNessuna valutazione finora
- Coats Elements of Reservoir SimulationDocumento199 pagineCoats Elements of Reservoir SimulationWelsinsin Kevin SinNessuna valutazione finora
- Instantaneous High Impedance Differential ProtectionDocumento49 pagineInstantaneous High Impedance Differential ProtectionHarish Nagabatla0% (1)
- Effect of Calcium Lignosulfonate On Properties of Concrete at Early AgesDocumento72 pagineEffect of Calcium Lignosulfonate On Properties of Concrete at Early AgesKresno Fatih ImaniNessuna valutazione finora
- Operational Characteristics of The Differential Dynamometer: Conductometric TitrationsDocumento77 pagineOperational Characteristics of The Differential Dynamometer: Conductometric TitrationsAnjali ShahNessuna valutazione finora
- A Compact and Portable EMP Generator Based On Tesla Transformer TechnologyDocumento200 pagineA Compact and Portable EMP Generator Based On Tesla Transformer Technologyjake polNessuna valutazione finora
- R 6915641Documento87 pagineR 6915641BulentNessuna valutazione finora
- ANO A: Design Construction of Twin Ruby LaserDocumento81 pagineANO A: Design Construction of Twin Ruby LaserHarsh ChaudharyNessuna valutazione finora
- Analysis of Induction Machine Dynamics During Power System UnbalancesDocumento199 pagineAnalysis of Induction Machine Dynamics During Power System Unbalancesthanh haNessuna valutazione finora
- DP MS 88 57Documento140 pagineDP MS 88 57Pushp DuttNessuna valutazione finora
- Thesis 2008 SarkarDocumento200 pagineThesis 2008 SarkarNivas VallavanNessuna valutazione finora
- 0 Matlab Simulink ModelDocumento6 pagine0 Matlab Simulink Modelpreety rajputNessuna valutazione finora
- Design of Vierendeel TrussesDocumento52 pagineDesign of Vierendeel TrusseskyleNessuna valutazione finora
- 67538905749Documento46 pagine67538905749Vibha LakheraNessuna valutazione finora
- Modelling and Analysis of Hydropower Generator RotDocumento81 pagineModelling and Analysis of Hydropower Generator RotAlija JusićNessuna valutazione finora
- IEEE STD 80 Substation DesignDocumento80 pagineIEEE STD 80 Substation DesignWaleed BASALAMANessuna valutazione finora
- CDC 10439 DS1Documento49 pagineCDC 10439 DS1Budyanung AninditaNessuna valutazione finora
- Hydro Plant BasicsDocumento12 pagineHydro Plant BasicsPrasanna DharmapriyaNessuna valutazione finora
- Merklin Eldon O1953Documento93 pagineMerklin Eldon O1953Arman ManguerraNessuna valutazione finora
- A Study of The Effect of Magnetite Additions To Shell Molds On THDocumento106 pagineA Study of The Effect of Magnetite Additions To Shell Molds On THneel gajNessuna valutazione finora
- The International Journal of Engineering and Science (The IJES)Documento7 pagineThe International Journal of Engineering and Science (The IJES)theijesNessuna valutazione finora
- TM 11 265Documento87 pagineTM 11 265Andy BuyzeNessuna valutazione finora
- Analysis of Elastic Thermal Stresses by Station-Function CollocatDocumento51 pagineAnalysis of Elastic Thermal Stresses by Station-Function CollocatAzeem KhanNessuna valutazione finora
- Teshima Yoshio 1953Documento113 pagineTeshima Yoshio 1953Luis Alejandro Álvarez ZapataNessuna valutazione finora
- Power System Stability - Computaton of Critical Clearing Time and PDFDocumento67 paginePower System Stability - Computaton of Critical Clearing Time and PDFBelayneh TadesseNessuna valutazione finora
- Report TFM JuanDavid Fitxer de ConsultaDocumento74 pagineReport TFM JuanDavid Fitxer de ConsultaCaelestisNessuna valutazione finora
- The Air-Jet Yarn Texturing Process With Particular Reference To Nozzle Design and Improved Yarn Test MethodsDocumento384 pagineThe Air-Jet Yarn Texturing Process With Particular Reference To Nozzle Design and Improved Yarn Test Methodsanil kapadiaNessuna valutazione finora
- Mercury Arc Rectifier Practice 1936 PDFDocumento255 pagineMercury Arc Rectifier Practice 1936 PDFKyle MacfarlaneNessuna valutazione finora
- MehdianiBehrooz1985 PDFDocumento163 pagineMehdianiBehrooz1985 PDFVijai Shankar SinghNessuna valutazione finora
- DincoloDocumento949 pagineDincoloManase RomeoNessuna valutazione finora
- MV VFDDocumento34 pagineMV VFDKelvin LiewNessuna valutazione finora
- Determination of Vapor-Liquid Equilibrium Data by Continuous DistDocumento73 pagineDetermination of Vapor-Liquid Equilibrium Data by Continuous DistJuan Fernando Cano LarrotaNessuna valutazione finora
- Methods of Measurement and Estimation of Discharges at Hydraulic StructuresDocumento46 pagineMethods of Measurement and Estimation of Discharges at Hydraulic StructuresJea Escabal MosenabreNessuna valutazione finora
- Direct Current Transmission - KimbarkDocumento264 pagineDirect Current Transmission - Kimbarksrinathchary100% (13)
- DQ Modeling and Dynamic CharacteristicsDocumento9 pagineDQ Modeling and Dynamic CharacteristicsNAENWI YAABARINessuna valutazione finora
- Proposal For Solar Rooftop Power Generating SystemDocumento12 pagineProposal For Solar Rooftop Power Generating SystemAnson GonsalvesNessuna valutazione finora
- Hydrogen From Renewable EnergyDocumento32 pagineHydrogen From Renewable EnergyKuldeep Singh PariharNessuna valutazione finora
- Boost ProjectDocumento13 pagineBoost ProjectAbdur RahmanNessuna valutazione finora
- ABB S800-S500 2ccc413003c0201Documento158 pagineABB S800-S500 2ccc413003c0201Andy WijayaNessuna valutazione finora
- BAM 1020 MOTOR SpecificationDocumento2 pagineBAM 1020 MOTOR SpecificationksbbsNessuna valutazione finora
- Phys 2 Lecture 01 Thermodynamics-1Documento19 paginePhys 2 Lecture 01 Thermodynamics-1Maruja TheaNessuna valutazione finora
- Difense University Institute of Technology: By: Dr. Milkias B. (PH.D.) Adama Science and Technology UniversityDocumento52 pagineDifense University Institute of Technology: By: Dr. Milkias B. (PH.D.) Adama Science and Technology UniversityyaredNessuna valutazione finora
- Compound Wound Generator Long & Short Shunt Compound WoundDocumento4 pagineCompound Wound Generator Long & Short Shunt Compound Woundmark amthonyNessuna valutazione finora
- Test Bank For Mosbys Respiratory Care Equipment 10th Edition J M CairoDocumento36 pagineTest Bank For Mosbys Respiratory Care Equipment 10th Edition J M Cairotrigraphlaudably.3i52id100% (47)
- Submitted By:-: Grid-Connected Wind-Photovoltaic Cogeneration Using Back-to-Back Voltage Source ConvertersDocumento9 pagineSubmitted By:-: Grid-Connected Wind-Photovoltaic Cogeneration Using Back-to-Back Voltage Source ConvertersThulasi PrasadNessuna valutazione finora
- CH 3 Domsttic Electtricity Textbook Suggested AnswersDocumento16 pagineCH 3 Domsttic Electtricity Textbook Suggested Answers黃淑敏Nessuna valutazione finora
- Fichas Técnicas Equipos Multifuncionales GELA 2Documento1 paginaFichas Técnicas Equipos Multifuncionales GELA 2hmr810104Nessuna valutazione finora
- Medium Voltage Potential Transformer Ptg5: Features 15Kv ClassDocumento2 pagineMedium Voltage Potential Transformer Ptg5: Features 15Kv ClassalejandrozabalaNessuna valutazione finora
- Environment Conservation and Hazard ManagementDocumento3 pagineEnvironment Conservation and Hazard ManagementKID'S ENTERTAINMENTNessuna valutazione finora
- Is 9921 3 1982 PDFDocumento12 pagineIs 9921 3 1982 PDFsridharNessuna valutazione finora
- Pathways and Pitfalls: The International Politics of Lebanon's Energy CrisisDocumento20 paginePathways and Pitfalls: The International Politics of Lebanon's Energy CrisisHoover InstitutionNessuna valutazione finora
- Catalogue MPS 2022Documento32 pagineCatalogue MPS 2022Vietnam Barista QuocVietNessuna valutazione finora
- Turbinas Evaporativas de GasDocumento158 pagineTurbinas Evaporativas de GasluijamurNessuna valutazione finora
- Electrical SubstationsDocumento16 pagineElectrical SubstationsEngr Syed Numan ShahNessuna valutazione finora
- Applied Thermodynamics: BSEE 2019-2023 3 Semester Pakistan Institute of Engineering and Applied Sciences, IslamabadDocumento43 pagineApplied Thermodynamics: BSEE 2019-2023 3 Semester Pakistan Institute of Engineering and Applied Sciences, IslamabadAliNessuna valutazione finora
- Protection of Transmission Lines (Distance Protection)Documento35 pagineProtection of Transmission Lines (Distance Protection)abdul basitNessuna valutazione finora
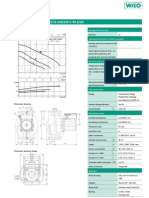
- Wilo TOP S 40 4 2080041Documento5 pagineWilo TOP S 40 4 2080041Banovic MirkoNessuna valutazione finora
- IC EnginesDocumento2 pagineIC EnginesVinay Korekar0% (1)
- 8DA11 ManualDocumento136 pagine8DA11 ManualCostin DavidoiuNessuna valutazione finora
- ABB Surge Arrester POLIM-C LB - Data Sheet 1HC0093992 E01 AADocumento4 pagineABB Surge Arrester POLIM-C LB - Data Sheet 1HC0093992 E01 AAHan HuangNessuna valutazione finora
- Capacitacion Tecnico-Comercial Generac, Personal RideDocumento81 pagineCapacitacion Tecnico-Comercial Generac, Personal Ridejrincon26Nessuna valutazione finora
- Ritz HFDSR Intro - Nov23Documento18 pagineRitz HFDSR Intro - Nov23Sulistyono SulistyonoNessuna valutazione finora
- Dual Servo FinalDocumento19 pagineDual Servo FinalAnonymous zHpPJaNessuna valutazione finora
- Design and Fault Analysis of EHV HVDC Transmission Line Using MATLAB SimulinkDocumento19 pagineDesign and Fault Analysis of EHV HVDC Transmission Line Using MATLAB SimulinkShubham Bodade100% (1)
- Planos de Interruptor 60kVDocumento22 paginePlanos de Interruptor 60kVLuis VasquezNessuna valutazione finora
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterDa EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterNessuna valutazione finora
- Solar Energy: Survive Easily on Solar Power Off the GridDa EverandSolar Energy: Survive Easily on Solar Power Off the GridNessuna valutazione finora
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesDa EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesValutazione: 4.5 su 5 stelle4.5/5 (21)
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceDa EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNessuna valutazione finora
- Well Integrity for Workovers and RecompletionsDa EverandWell Integrity for Workovers and RecompletionsValutazione: 5 su 5 stelle5/5 (3)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialDa EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNessuna valutazione finora
- Building Energy Management Systems and Techniques: Principles, Methods, and ModellingDa EverandBuilding Energy Management Systems and Techniques: Principles, Methods, and ModellingNessuna valutazione finora
- Renewable Energy: Physics, Engineering, Environmental Impacts, Economics and PlanningDa EverandRenewable Energy: Physics, Engineering, Environmental Impacts, Economics and PlanningValutazione: 5 su 5 stelle5/5 (4)
- Well Control for Completions and InterventionsDa EverandWell Control for Completions and InterventionsValutazione: 4 su 5 stelle4/5 (10)
- Renewable Energy Finance: Theory and PracticeDa EverandRenewable Energy Finance: Theory and PracticeValutazione: 4 su 5 stelle4/5 (1)
- Introduction to Power System ProtectionDa EverandIntroduction to Power System ProtectionValutazione: 5 su 5 stelle5/5 (1)
- Electric Motor Control: DC, AC, and BLDC MotorsDa EverandElectric Motor Control: DC, AC, and BLDC MotorsValutazione: 4.5 su 5 stelle4.5/5 (19)
- Oil: An Overview of the Petroleum IndustryDa EverandOil: An Overview of the Petroleum IndustryValutazione: 4.5 su 5 stelle4.5/5 (3)
- The Homeowner's DIY Guide to Electrical WiringDa EverandThe Homeowner's DIY Guide to Electrical WiringValutazione: 5 su 5 stelle5/5 (2)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureDa EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureValutazione: 3.5 su 5 stelle3.5/5 (48)
- Oil companies and the energy transitionDa EverandOil companies and the energy transitionNessuna valutazione finora
- Shorting the Grid: The Hidden Fragility of Our Electric GridDa EverandShorting the Grid: The Hidden Fragility of Our Electric GridValutazione: 4.5 su 5 stelle4.5/5 (2)
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ADa EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ANessuna valutazione finora
- Electric Motors and Drives: Fundamentals, Types and ApplicationsDa EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsValutazione: 4.5 su 5 stelle4.5/5 (12)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsDa EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNessuna valutazione finora
- Handbook of Offshore Oil and Gas OperationsDa EverandHandbook of Offshore Oil and Gas OperationsValutazione: 4.5 su 5 stelle4.5/5 (4)
- Case Studies of Material Corrosion Prevention for Oil and Gas ValvesDa EverandCase Studies of Material Corrosion Prevention for Oil and Gas ValvesNessuna valutazione finora
- Global Landscape of Renewable Energy FinanceDa EverandGlobal Landscape of Renewable Energy FinanceNessuna valutazione finora
- Natural Gas Processing: Technology and Engineering DesignDa EverandNatural Gas Processing: Technology and Engineering DesignValutazione: 5 su 5 stelle5/5 (8)
- Thermal Power Plant: Design and OperationDa EverandThermal Power Plant: Design and OperationValutazione: 4.5 su 5 stelle4.5/5 (23)
- Handbook on Battery Energy Storage SystemDa EverandHandbook on Battery Energy Storage SystemValutazione: 4.5 su 5 stelle4.5/5 (2)