Potrebbero piacerti anche
- 4 - Improved Altitude Control Algorithm For Quadcopter Unmanned Aerial Vehicles PDFDocumento15 pagine4 - Improved Altitude Control Algorithm For Quadcopter Unmanned Aerial Vehicles PDFusmancheema81Nessuna valutazione finora
- Aircraft Pitch Control Design Using LQG Controller Based On Genetic AlgorithmDocumento9 pagineAircraft Pitch Control Design Using LQG Controller Based On Genetic AlgorithmTELKOMNIKANessuna valutazione finora
- A PID-Type Fuzzy Logic Controller-Based Approach For Motion Control ApplicationsDocumento19 pagineA PID-Type Fuzzy Logic Controller-Based Approach For Motion Control ApplicationsAlexandre RezendeNessuna valutazione finora
- Comparison of Classical PD and Fuzzy PD Controller Performances of An Aircraft Pitch Angle Control SystemDocumento9 pagineComparison of Classical PD and Fuzzy PD Controller Performances of An Aircraft Pitch Angle Control SystemDalia MuraddNessuna valutazione finora
- Backstepping Approach For Design of PID Controller With Guaranteed Performance For Micro-Air UAVDocumento15 pagineBackstepping Approach For Design of PID Controller With Guaranteed Performance For Micro-Air UAVDuy KhổngNessuna valutazione finora
- Aerospace 04 00003sdDocumento17 pagineAerospace 04 00003sdnabillNessuna valutazione finora
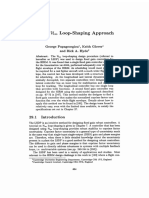
- Mechatronics: Baris Baykant Alagoz, Abdullah Ates, Celaleddin YerogluDocumento9 pagineMechatronics: Baris Baykant Alagoz, Abdullah Ates, Celaleddin Yeroglunsit.mohitNessuna valutazione finora
- Optimizing An Adaptive Fuzzy Logic Controller of A 3-DOF Helicopter With A Modified PSO AlgorithmDocumento35 pagineOptimizing An Adaptive Fuzzy Logic Controller of A 3-DOF Helicopter With A Modified PSO Algorithmshuku.naderiNessuna valutazione finora
- Design and Experimentation of A Self-Tuning PID Control Applied To The 3DOF HelicopterDocumento21 pagineDesign and Experimentation of A Self-Tuning PID Control Applied To The 3DOF HelicopterMairaj-ud-din MuftiNessuna valutazione finora
- Adaptive Backstepping Ight Control For A mini-UAVDocumento18 pagineAdaptive Backstepping Ight Control For A mini-UAVoussama sadkiNessuna valutazione finora
- Pitch ControlDocumento14 paginePitch Controlsakthiya ramNessuna valutazione finora
- 88 IjecsDocumento15 pagine88 IjecsMuhammad RamishNessuna valutazione finora
- LQR and Lmi Based Optimal Control Design For Aircraft PDFDocumento7 pagineLQR and Lmi Based Optimal Control Design For Aircraft PDFFlorea Maria BiancaNessuna valutazione finora
- Nonlinear Adaptive Flight Control Using Neural NetworksDocumento24 pagineNonlinear Adaptive Flight Control Using Neural NetworksAria IraniNessuna valutazione finora
- Mathematical Modelling of Engineering Problems: Received: 26 June 2022 Accepted: 22 October 2022Documento7 pagineMathematical Modelling of Engineering Problems: Received: 26 June 2022 Accepted: 22 October 2022mustafa11dahamNessuna valutazione finora
- Control Methods For QuadsDocumento28 pagineControl Methods For Quadshw606Nessuna valutazione finora
- Calculation and Identification of The Aerodynamic ParametersDocumento18 pagineCalculation and Identification of The Aerodynamic Parametersgustavo12Nessuna valutazione finora
- Mathematical Modeling and Simulation of Quadcopter-UAV Using PID ControllerDocumento8 pagineMathematical Modeling and Simulation of Quadcopter-UAV Using PID Controllerأبو هشامNessuna valutazione finora
- Enhancing Performance and Stability of Gain-Scheduling Control SystemDocumento21 pagineEnhancing Performance and Stability of Gain-Scheduling Control SystemAisha Sir ElkhatemNessuna valutazione finora
- Reliable Robust Flight Tracking Control: An LMI ApproachDocumento14 pagineReliable Robust Flight Tracking Control: An LMI ApproachPriyanka ChowdaryNessuna valutazione finora
- Robust Second Order Sliding Mode Control For A Quadrotor Considering Motor DynamicsDocumento17 pagineRobust Second Order Sliding Mode Control For A Quadrotor Considering Motor DynamicsijctcmjournalNessuna valutazione finora
- Flight Control Laws Carefree Handling Clearance of A Highly Manoeuvrable Aircraft Using Multi-Strategy Adaptive Global OptimizationDocumento15 pagineFlight Control Laws Carefree Handling Clearance of A Highly Manoeuvrable Aircraft Using Multi-Strategy Adaptive Global OptimizationBlaze123xNessuna valutazione finora
- The International Journal of Engineering & ScienceDocumento9 pagineThe International Journal of Engineering & SciencetheijesNessuna valutazione finora
- Feedback Linearization and High Order Sliding Mode Observer For A Quadrotor UAVDocumento8 pagineFeedback Linearization and High Order Sliding Mode Observer For A Quadrotor UAVVictor Hugo OrtizNessuna valutazione finora
- Design of A Flight Stabilizer System and Automatic ControlDocumento5 pagineDesign of A Flight Stabilizer System and Automatic ControlJoshua DanielNessuna valutazione finora
- Eucass2017 204Documento16 pagineEucass2017 204joseph.mangan1892Nessuna valutazione finora
- Control and Estimation of A Quadcopter Dynamical MDocumento14 pagineControl and Estimation of A Quadcopter Dynamical MmahendranavionicsNessuna valutazione finora
- Er Giner 2012 VtolDocumento10 pagineEr Giner 2012 VtolAtharva SalunkheNessuna valutazione finora
- PID Drone Longitudinal Stabilisation: Control System - Ece2010 Project ReportDocumento20 paginePID Drone Longitudinal Stabilisation: Control System - Ece2010 Project Reportlahari jagarlamudiNessuna valutazione finora
- Flight Control Lecture 3Documento56 pagineFlight Control Lecture 3Sahil SahNessuna valutazione finora
- 2010 PDFDocumento7 pagine2010 PDFShaheer DurraniNessuna valutazione finora
- Design of Non Linear Dynamic Inversion Controller For Trajectory FollowingDocumento8 pagineDesign of Non Linear Dynamic Inversion Controller For Trajectory FollowingHimanshuPrabhatNessuna valutazione finora
- InTech-Acceleration Based 3d Flight Control For Uavs Strategy and Longitudinal DesignDocumento24 pagineInTech-Acceleration Based 3d Flight Control For Uavs Strategy and Longitudinal DesignAndrei BadulescuNessuna valutazione finora
- Adaptive Neural Motion Control of A QuadrotorDocumento23 pagineAdaptive Neural Motion Control of A Quadrotorjos romNessuna valutazione finora
- An Aeroload SimulatorDocumento71 pagineAn Aeroload SimulatorNikunj AgarwalNessuna valutazione finora
- Optimal Fuzzy Self-Tuning of PI Controller Using Genetic Algorithm For Induction Motor Speed ControlDocumento2 pagineOptimal Fuzzy Self-Tuning of PI Controller Using Genetic Algorithm For Induction Motor Speed ControlSALEM234Nessuna valutazione finora
- Ahs 2006 Harding Ah64d MclawsDocumento15 pagineAhs 2006 Harding Ah64d MclawsversineNessuna valutazione finora
- A Fuzzy Track-Keeping Autopilot ForDocumento13 pagineA Fuzzy Track-Keeping Autopilot ForfaisalzhuidaNessuna valutazione finora
- 2012, An Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool Box V66-159an Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool BoxDocumento4 pagine2012, An Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool Box V66-159an Algorithm For Autonomous Aerial Navigation Using MATLAB® Mapping Tool BoxAph MazharNessuna valutazione finora
- Design and Simulation of Longitudinal Autopilot Modes For A Conventional AircraftDocumento7 pagineDesign and Simulation of Longitudinal Autopilot Modes For A Conventional AircraftDeniz Can ÇetinelNessuna valutazione finora
- Control and Navigation System For A Fixed-Wing Unmanned Aerial VehicleDocumento11 pagineControl and Navigation System For A Fixed-Wing Unmanned Aerial VehicleJU EE 2021Nessuna valutazione finora
- Ica20110200001 94894672Documento8 pagineIca20110200001 94894672Anggara T NugrahaNessuna valutazione finora
- 1 PBDocumento12 pagine1 PBK JelNessuna valutazione finora
- CH 29Documento20 pagineCH 29aprilswapnilNessuna valutazione finora
- Dynamics and Control For An In-Plane Morphing Wing: Shi Rongqi and Song JianmeiDocumento8 pagineDynamics and Control For An In-Plane Morphing Wing: Shi Rongqi and Song JianmeiRitesh SinghNessuna valutazione finora
- Applied SciencesDocumento26 pagineApplied SciencesMiguel Angel Cruz DiazNessuna valutazione finora
- 01 Fuzzy Model Reference Learning Control For Cargo Ship SteeringDocumento12 pagine01 Fuzzy Model Reference Learning Control For Cargo Ship SteeringermankoybasiNessuna valutazione finora
- Robust Attitude Control of Helicopters With Actuator Dynamics Using Neural NetworksDocumento18 pagineRobust Attitude Control of Helicopters With Actuator Dynamics Using Neural NetworksAbdallah Omar Al AyoubiNessuna valutazione finora
- Vtol Design PDFDocumento25 pagineVtol Design PDFElner CrystianNessuna valutazione finora
- Logic For Mode Transition of Autopilots in Lateral Direction For Commercial AircraftsDocumento7 pagineLogic For Mode Transition of Autopilots in Lateral Direction For Commercial AircraftsBONFRINGNessuna valutazione finora
- An Alternative Structure For Next Generation Regulatory Controllers Part I Basic Theory For Design Development and Implementation 2006 Journal of ProcDocumento11 pagineAn Alternative Structure For Next Generation Regulatory Controllers Part I Basic Theory For Design Development and Implementation 2006 Journal of ProcLarry LimNessuna valutazione finora
- CSD146Documento4 pagineCSD146Erlan MedranoNessuna valutazione finora
- Heba ElKholy Thesis S2014Documento13 pagineHeba ElKholy Thesis S2014AlexandraAndreeaNessuna valutazione finora
- Stability and Control of Stovl Aircraft PDFDocumento10 pagineStability and Control of Stovl Aircraft PDFChegrani AhmedNessuna valutazione finora
- Mechatronics: Baris Baykant Alagoz, Abdullah Ates, Celaleddin YerogluDocumento9 pagineMechatronics: Baris Baykant Alagoz, Abdullah Ates, Celaleddin Yerogludiego martos tavaresNessuna valutazione finora
- H Robust Control Design For The Nasa Airstar Flight Test VehicleDocumento14 pagineH Robust Control Design For The Nasa Airstar Flight Test VehicleAlfa BetaNessuna valutazione finora
- Autopilot Design of Tilt Rotor UAV Using Particle Swarm Optimization MethodDocumento5 pagineAutopilot Design of Tilt Rotor UAV Using Particle Swarm Optimization MethodMohammad Reza MadadiNessuna valutazione finora
- 6/Vwhp, Ghqwlilfdwlrq DQG &rqwuro Ri D 6Pdoo-6Fdoh 3dudprwruDocumento7 pagine6/Vwhp, Ghqwlilfdwlrq DQG &rqwuro Ri D 6Pdoo-6Fdoh 3dudprwrusudhirm16Nessuna valutazione finora
- Nature-Inspired Optimization Algorithms for Fuzzy Controlled Servo SystemsDa EverandNature-Inspired Optimization Algorithms for Fuzzy Controlled Servo SystemsNessuna valutazione finora
- Energies: Model Predictive Control Optimization Via Genetic Algorithm Using A Detailed Building Energy ModelDocumento18 pagineEnergies: Model Predictive Control Optimization Via Genetic Algorithm Using A Detailed Building Energy ModelNors NoorNessuna valutazione finora
- Design of Hybrid Neural Fuzzy Controller For Human Robotic Leg SystemDocumento11 pagineDesign of Hybrid Neural Fuzzy Controller For Human Robotic Leg SystemNors NoorNessuna valutazione finora
- 10.1007@978 3 030 25446 9Documento363 pagine10.1007@978 3 030 25446 9Nors NoorNessuna valutazione finora
- Ornelas Tellez2012Documento13 pagineOrnelas Tellez2012Nors NoorNessuna valutazione finora
- Design of Fuzzy Controller Rule Base Using Bat Algorithm Design of Fuzzy Controller Rule Base Using Bat AlgorithmDocumento10 pagineDesign of Fuzzy Controller Rule Base Using Bat Algorithm Design of Fuzzy Controller Rule Base Using Bat AlgorithmNors NoorNessuna valutazione finora
- RBF NN-Based Backstepping Control For Strict Feedback Block Nonlinear System and Its ApplicationDocumento9 pagineRBF NN-Based Backstepping Control For Strict Feedback Block Nonlinear System and Its ApplicationNors NoorNessuna valutazione finora
- Adaptive Backstepping Control: Abstract. Adaptive Backsteppingalgorithms For A Class of Nonlinear ContinuousDocumento25 pagineAdaptive Backstepping Control: Abstract. Adaptive Backsteppingalgorithms For A Class of Nonlinear ContinuousNors NoorNessuna valutazione finora
- University of Technology Control and System Eng. Computer Branch Arduino 2019-2020 Diana Hikmat Hassan Duaa Saad QiabDocumento10 pagineUniversity of Technology Control and System Eng. Computer Branch Arduino 2019-2020 Diana Hikmat Hassan Duaa Saad QiabNors NoorNessuna valutazione finora
- On Integral Control in Backstepping: Analysis of Different TechniquesDocumento6 pagineOn Integral Control in Backstepping: Analysis of Different TechniquesNors NoorNessuna valutazione finora
- California Institute of Technology Control and Dynamical Systems CDS 270: Adaptive ControlDocumento2 pagineCalifornia Institute of Technology Control and Dynamical Systems CDS 270: Adaptive ControlNors NoorNessuna valutazione finora
- Matlab/simulink Simulation of Unified Power Quality Conditioner-Battery Energy Storage System Supplied by PV-wind Hybrid Using Fuzzy Logic ControllerDocumento17 pagineMatlab/simulink Simulation of Unified Power Quality Conditioner-Battery Energy Storage System Supplied by PV-wind Hybrid Using Fuzzy Logic ControllerNors NoorNessuna valutazione finora
- 1 PB PDFDocumento9 pagine1 PB PDFNors NoorNessuna valutazione finora
- Design and Implementation of A Novel Adaptive Backstepping Control Scheme For A PMSM With Unknown Load TorqueDocumento11 pagineDesign and Implementation of A Novel Adaptive Backstepping Control Scheme For A PMSM With Unknown Load TorqueNors NoorNessuna valutazione finora
- FPGA Implementation of MIMO AlgorithmsDocumento4 pagineFPGA Implementation of MIMO AlgorithmsNors NoorNessuna valutazione finora
- Engel 2015 IOP Conf. Ser. Mater. Sci. Eng. 94 012009Documento9 pagineEngel 2015 IOP Conf. Ser. Mater. Sci. Eng. 94 012009Nors NoorNessuna valutazione finora
- Fuzzy Logic Control of A Rotary Double Inverted Pendulum SystemDocumento8 pagineFuzzy Logic Control of A Rotary Double Inverted Pendulum SystemNors Noor0% (1)
- Pack-A-Plane: Designing A Compact RC Aircraft For Rapid DeploymentDocumento16 paginePack-A-Plane: Designing A Compact RC Aircraft For Rapid DeploymentBartłomiej BurlagaNessuna valutazione finora
- Uavbook SupplementDocumento156 pagineUavbook SupplementWilliam LinNessuna valutazione finora
- Design of Electrical Powertrain For Chalmers Formula Stu-Dent With Focus On 4WD Versus RWD and Regenerative BrakingDocumento72 pagineDesign of Electrical Powertrain For Chalmers Formula Stu-Dent With Focus On 4WD Versus RWD and Regenerative BrakingLuizNessuna valutazione finora
- VTOL Tilt Rotor Equations of Motion, Trim and LinealizationDocumento15 pagineVTOL Tilt Rotor Equations of Motion, Trim and LinealizationRafael TrujilloNessuna valutazione finora
- Eagle - ManualDocumento2 pagineEagle - ManualAldo SantosNessuna valutazione finora
- Modeling UavsDocumento30 pagineModeling UavsendoparasiteNessuna valutazione finora
- A320 Flight Deck and Systems BriefingDocumento223 pagineA320 Flight Deck and Systems Briefingpontoo100% (6)
- A320 Hyd PDFDocumento1 paginaA320 Hyd PDFStephanie Johnson100% (1)
- Kongsberg Cjoy Ot Joystick System: Operator ManualDocumento208 pagineKongsberg Cjoy Ot Joystick System: Operator ManualBeni SaputraNessuna valutazione finora
- Flightline ManualDocumento4 pagineFlightline ManualLol PcNessuna valutazione finora
- 3DOF HelicopterDocumento2 pagine3DOF HelicopterQazi KamalNessuna valutazione finora
- Missile Roll Control Part IIDocumento9 pagineMissile Roll Control Part IID.Viswanath100% (2)
- GL 117Documento14 pagineGL 117Luiz CarlosNessuna valutazione finora
- "Design & Development Analysis of Quadcopter": Parag Parihar, Priyanshu Bhawsar, Piyush HargodDocumento6 pagine"Design & Development Analysis of Quadcopter": Parag Parihar, Priyanshu Bhawsar, Piyush HargodAnonymous e7Rajar9SwNessuna valutazione finora
- The Brillant Engineering of The First FlightDocumento1 paginaThe Brillant Engineering of The First FlightMarine LecomteNessuna valutazione finora
- F-16d BLK 50 AlbaceteDocumento40 pagineF-16d BLK 50 AlbacetedimNessuna valutazione finora
- Principles of Flight: Presented by Group - 1Documento32 paginePrinciples of Flight: Presented by Group - 1Anonymous VKv75qe98Nessuna valutazione finora
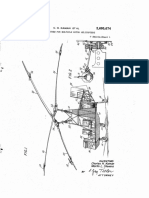
- 1950 Kaman Servoflap US2695674Documento23 pagine1950 Kaman Servoflap US2695674jorge paezNessuna valutazione finora
- Simulation Research On An Electric Vehicle Chassis System Based On A Collaborative Control SystemDocumento18 pagineSimulation Research On An Electric Vehicle Chassis System Based On A Collaborative Control SystemJulius RojoNessuna valutazione finora
- Nasa Ntrs Archive 19810019547Documento90 pagineNasa Ntrs Archive 19810019547aero sapaceNessuna valutazione finora
- A Battlefield 4 Jet Tutorial Manuscript Rev 2Documento27 pagineA Battlefield 4 Jet Tutorial Manuscript Rev 2Russel Nicoletti Voyka100% (1)
- Xflr5 Analysis of Foils and Wings Operating at Low Reynolds NumbersDocumento53 pagineXflr5 Analysis of Foils and Wings Operating at Low Reynolds NumbersSusycosta5py100% (3)
- B200 Normal ProceduresDocumento18 pagineB200 Normal ProceduresManuel NietoNessuna valutazione finora
- ArduPilot For Cessna 182 ProjectDocumento40 pagineArduPilot For Cessna 182 Projectahmedmedhat_eg7021Nessuna valutazione finora
- QuadDocumento55 pagineQuadVgokulGokulNessuna valutazione finora
- Missile ControlDocumento9 pagineMissile ControlD.Viswanath100% (2)
- QRH E170Documento128 pagineQRH E170bnolascoNessuna valutazione finora
- Control Surface Sizing: Level Flight TrimDocumento14 pagineControl Surface Sizing: Level Flight Trima320neoNessuna valutazione finora
- Direction IndicatorDocumento7 pagineDirection IndicatorHimanshu HaldarNessuna valutazione finora
- Autopilot System: Flight Guidance Mode SelectionDocumento16 pagineAutopilot System: Flight Guidance Mode SelectionHelene AnesterNessuna valutazione finora