Potrebbero piacerti anche
- A Reconfigurable Digital Signal Processing SystemDocumento6 pagineA Reconfigurable Digital Signal Processing Systempym1506gmail.comNessuna valutazione finora
- Introduction To IC: Instructor: NCTUDocumento34 pagineIntroduction To IC: Instructor: NCTUTan Chee YeongNessuna valutazione finora
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Da EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Nessuna valutazione finora
- B35apo - Lecture07 Io 1Documento122 pagineB35apo - Lecture07 Io 1dukeNessuna valutazione finora
- Computing Platforms: Design Methodology. Consumer Electronics Architectures. System-Level Performance and Power AnalysisDocumento38 pagineComputing Platforms: Design Methodology. Consumer Electronics Architectures. System-Level Performance and Power AnalysisLordwin MichealNessuna valutazione finora
- When To Use A Clock Vs An OscillatorDocumento4 pagineWhen To Use A Clock Vs An OscillatorjeykrisNessuna valutazione finora
- Laboratory Exercise 12: BackgroundDocumento6 pagineLaboratory Exercise 12: BackgroundRyan ReasNessuna valutazione finora
- Hitachi PLCDocumento8 pagineHitachi PLCTeck Soon TeoNessuna valutazione finora
- 2011 ARM Physical IP Seminar Taiwan Mickie LiuDocumento15 pagine2011 ARM Physical IP Seminar Taiwan Mickie LiuMohith ThankachanNessuna valutazione finora
- ASSIGNMENT 1 (Embd&IOmT)Documento9 pagineASSIGNMENT 1 (Embd&IOmT)rakesh.jNessuna valutazione finora
- Dap-Final ReportDocumento67 pagineDap-Final Reportedinesh90Nessuna valutazione finora
- I2c Bus OverviewDocumento158 pagineI2c Bus OverviewSkyline Dv100% (2)
- Design and Implementation of FPGA Based 32 Bit Floating Point Processor For DSP ApplicationDocumento5 pagineDesign and Implementation of FPGA Based 32 Bit Floating Point Processor For DSP ApplicationAzhar Yaseen N JNessuna valutazione finora
- Introduction To Embedded System DesignDocumento22 pagineIntroduction To Embedded System DesignAnanthNessuna valutazione finora
- DSK 6713Documento15 pagineDSK 6713sachin_bhingareNessuna valutazione finora
- FPGA Basics and Nios II Processor Intro: Week 2 Dr. Kimberly E. Newman Hybrid Embedded SystemsDocumento22 pagineFPGA Basics and Nios II Processor Intro: Week 2 Dr. Kimberly E. Newman Hybrid Embedded Systemskanthi_thotaNessuna valutazione finora
- DSP Processors Engr. Naveed Khan BalochDocumento48 pagineDSP Processors Engr. Naveed Khan BalochMuhammad AqilNessuna valutazione finora
- Mircroprocessor Systems and InterfacingDocumento72 pagineMircroprocessor Systems and InterfacingMuaz ShahidNessuna valutazione finora
- All Digital FPGA Based Lock-In AmplifierDocumento15 pagineAll Digital FPGA Based Lock-In AmplifiersastrakusumawijayaNessuna valutazione finora
- Psoc Handbook Manual OfficialDocumento78 paginePsoc Handbook Manual Officialsantosh_babar_26Nessuna valutazione finora
- Describe The Operation of Timing and Control BlockDocumento4 pagineDescribe The Operation of Timing and Control BlockTamayo Arrianna MurielNessuna valutazione finora
- Introduction To SOCDocumento50 pagineIntroduction To SOCPraveen HalladmaniNessuna valutazione finora
- Doc-A.14-Text Editor On A LCD Using At89c51 Micro Controller and KeyboardDocumento48 pagineDoc-A.14-Text Editor On A LCD Using At89c51 Micro Controller and KeyboardRockson Kwame AgyemanNessuna valutazione finora
- Chapter TwoDocumento14 pagineChapter TwoAbdissaTadeseNessuna valutazione finora
- Music Synthesizer Senior Project - Individual ReportDocumento39 pagineMusic Synthesizer Senior Project - Individual Report邓雪松Nessuna valutazione finora
- Design and Implementation of Digital IIR & FIR Filters On DSK6713 Using CC STUDIOV6.1 PlatformDocumento6 pagineDesign and Implementation of Digital IIR & FIR Filters On DSK6713 Using CC STUDIOV6.1 PlatformIheb HamedNessuna valutazione finora
- Embedded Analog To Digital ConvertersDocumento13 pagineEmbedded Analog To Digital Converterspamba anjanaNessuna valutazione finora
- Ccs Manual 1Documento53 pagineCcs Manual 1VicathorNessuna valutazione finora
- NIOS II ProcessorDocumento28 pagineNIOS II ProcessorVinchipsytm VlsitrainingNessuna valutazione finora
- New Advances in ONFI (Open NAND Flash Interface) : Knut GrimsrudDocumento16 pagineNew Advances in ONFI (Open NAND Flash Interface) : Knut GrimsrudSrinivas KrishnaNessuna valutazione finora
- 2 Marks MicroprocessorDocumento17 pagine2 Marks MicroprocessorShreyaNessuna valutazione finora
- Research Paper GPS Based Voice Alert System For The BlindDocumento5 pagineResearch Paper GPS Based Voice Alert System For The BlindVenkata RatnamNessuna valutazione finora
- RTU560 Remote Terminal Unit: Subdevice Communication Interface With Indactic 33 ProtocolDocumento35 pagineRTU560 Remote Terminal Unit: Subdevice Communication Interface With Indactic 33 ProtocolT Dung LuNessuna valutazione finora
- 89 S 52Documento8 pagine89 S 52Ashok BalajiNessuna valutazione finora
- DSP Lab Manual - UpdatedDocumento70 pagineDSP Lab Manual - UpdatedSatya kavyaNessuna valutazione finora
- Fpga Based Processor ImplementationDocumento5 pagineFpga Based Processor ImplementationGHATAM A S S P PAVANKUMAR SASTRINessuna valutazione finora
- Lecture 3Documento39 pagineLecture 3akttripathi0% (1)
- Power Saving Time Operated Electrical Appliance Using Microcontroller AT89S52Documento19 paginePower Saving Time Operated Electrical Appliance Using Microcontroller AT89S52zetamieNessuna valutazione finora
- Synthesis AlDocumento7 pagineSynthesis AlAgnathavasiNessuna valutazione finora
- Introduction To MicrocontrollersDocumento13 pagineIntroduction To MicrocontrollerssvirkomartinkoNessuna valutazione finora
- Lecture 3Documento39 pagineLecture 3Joseph AntoNessuna valutazione finora
- Introduction To Embedded SystemsDocumento64 pagineIntroduction To Embedded SystemsTechTerms_YoutubeNessuna valutazione finora
- Mechatronics 4Documento7 pagineMechatronics 4Ab AnNessuna valutazione finora
- Computer Architecture and OrganizationDocumento49 pagineComputer Architecture and OrganizationMooni KhanNessuna valutazione finora
- Embedded Systems IntroductionDocumento44 pagineEmbedded Systems IntroductionGokulSubramanianNessuna valutazione finora
- Xport TCP IpDocumento5 pagineXport TCP IpKarthick Vijayan100% (1)
- Arquitectura de PSoC - EasypsocDocumento41 pagineArquitectura de PSoC - EasypsocRednaxela SaenzNessuna valutazione finora
- Integrated Control System: Prepared By: Guided By: Rajyaguru Maulik M. D.M. Patel (General Manage, Inst)Documento31 pagineIntegrated Control System: Prepared By: Guided By: Rajyaguru Maulik M. D.M. Patel (General Manage, Inst)Sunil PillaiNessuna valutazione finora
- Emerson DCS PresentationDocumento25 pagineEmerson DCS Presentationruchikaporwal2018Nessuna valutazione finora
- Chapter 2.1 MicrocontrollerDocumento32 pagineChapter 2.1 MicrocontrollerEyob eyasuNessuna valutazione finora
- MC 18ec46 Mod1Documento19 pagineMC 18ec46 Mod1kirthi bharadwajNessuna valutazione finora
- Vlsi Design FlowDocumento7 pagineVlsi Design FlowAster RevNessuna valutazione finora
- Microcontroller 8051Documento31 pagineMicrocontroller 8051Munazza FatmaNessuna valutazione finora
- The Microarchitecture of The Pentium 4 Processor 1Documento12 pagineThe Microarchitecture of The Pentium 4 Processor 1nwxcvbnNessuna valutazione finora
- EL 501 OSP 5020 Electrical Maintenance RevDDocumento478 pagineEL 501 OSP 5020 Electrical Maintenance RevDAntonio Lucas100% (4)
- D V A Apb3 P C: Esign and Erification Nalysis of Rotocol With OverageDocumento8 pagineD V A Apb3 P C: Esign and Erification Nalysis of Rotocol With OverageAliya SarunNessuna valutazione finora
- SAED Cell Lib Rev1 4 20 1 PDFDocumento100 pagineSAED Cell Lib Rev1 4 20 1 PDFPradeep RoyalNessuna valutazione finora
- DO-254/CTS™: FPGA Level In-Target TestingDocumento2 pagineDO-254/CTS™: FPGA Level In-Target Testingmadhu.nandha9285Nessuna valutazione finora
- Methodology of RGY Traffic Light Controller SystemDocumento23 pagineMethodology of RGY Traffic Light Controller Systemincubusmalique008Nessuna valutazione finora
- Vlsi TestingDocumento51 pagineVlsi Testingkashi vissuNessuna valutazione finora
- Computer Organization Instruction FormatsDocumento5 pagineComputer Organization Instruction FormatstawandaNessuna valutazione finora
- Sumi Proj Copyprojectdoc (Repaired)Documento13 pagineSumi Proj Copyprojectdoc (Repaired)lucky jNessuna valutazione finora
- Memory Types LaptopDocumento4 pagineMemory Types LaptopNsb El-kathiriNessuna valutazione finora
- Computer System ArchitectureDocumento22 pagineComputer System ArchitectureParth ViraniNessuna valutazione finora
- L192 CMOSPassCompI (2 UP) PDFDocumento10 pagineL192 CMOSPassCompI (2 UP) PDFmurganNessuna valutazione finora
- Transistores PEAVEYDocumento25 pagineTransistores PEAVEYalitoparana75% (4)
- Baremetal On ARMDocumento30 pagineBaremetal On ARMsuchakraNessuna valutazione finora
- Logic Circuit Simplification - Page1 - Combine - CombineDocumento10 pagineLogic Circuit Simplification - Page1 - Combine - CombineChethan JayasimhaNessuna valutazione finora
- Ee 381A: Digital Circuits and Microprocessors 2021-2022/II Experiment 2 Prbs & Sequence Generators Using Shift RegistersDocumento2 pagineEe 381A: Digital Circuits and Microprocessors 2021-2022/II Experiment 2 Prbs & Sequence Generators Using Shift RegistersAKANSH AGRAWALNessuna valutazione finora
- WS File 1Documento13 pagineWS File 1rhythm 2021Nessuna valutazione finora
- Scan Insertion Lab Observations: Vlsiguru DFT TrainingDocumento3 pagineScan Insertion Lab Observations: Vlsiguru DFT Trainingsenthilkumar100% (1)
- AND Gate PROJECT REPORTDocumento5 pagineAND Gate PROJECT REPORTSanskar Bhalerao100% (1)
- Parts of MotherboardDocumento14 pagineParts of MotherboardNoelyn GarciaNessuna valutazione finora
- PLC ProgrammingDocumento53 paginePLC ProgrammingSnehilNessuna valutazione finora
- Logic Gates True or FalseDocumento5 pagineLogic Gates True or FalseEmilia KullutweNessuna valutazione finora
- Clock GeneratorDocumento11 pagineClock GeneratorswathipushpaNessuna valutazione finora
- Project On Logic Gate (Not Gate)Documento3 pagineProject On Logic Gate (Not Gate)ANSHUMAN SAGARNessuna valutazione finora
- Introduction Au TransistorsDocumento3 pagineIntroduction Au TransistorsY WNessuna valutazione finora
- FSM AnswersDocumento6 pagineFSM AnswersstudboyNessuna valutazione finora
- 06 Library Dokumentation v2.0 enDocumento13 pagine06 Library Dokumentation v2.0 enBenyamin Farzaneh AghajarieNessuna valutazione finora
- SSFDFDocumento9 pagineSSFDFMaycol ParicahuaNessuna valutazione finora
- Dr. N.G.P. Institute of Technology: Unit - I Minimization Techniques and Logic GatesDocumento23 pagineDr. N.G.P. Institute of Technology: Unit - I Minimization Techniques and Logic Gatessaipradeepkp90% (20)
- 74 HC 573Documento5 pagine74 HC 573Yann Van OsselaerNessuna valutazione finora
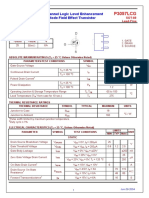
- P3057LCG Niko-Sem: N-Channel Logic Level Enhancement Mode Field Effect TransistorDocumento4 pagineP3057LCG Niko-Sem: N-Channel Logic Level Enhancement Mode Field Effect Transistorlepicane7Nessuna valutazione finora
- EE-421 Digital System Design Laboratory Manual: Group MembersDocumento34 pagineEE-421 Digital System Design Laboratory Manual: Group MembersMuhammad SohaibNessuna valutazione finora
- Atmel ATmega328 Test Circuit DiagramDocumento6 pagineAtmel ATmega328 Test Circuit Diagramcadeyare2Nessuna valutazione finora