Potrebbero piacerti anche
- N-Line Simulation (Lossless) : (T) and Z (T) (T) and (T)Documento3 pagineN-Line Simulation (Lossless) : (T) and Z (T) (T) and (T)Ioan TudosaNessuna valutazione finora
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Da EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Nessuna valutazione finora
- Lecture14 Wed Oct 11Documento3 pagineLecture14 Wed Oct 11Akib ImtihanNessuna valutazione finora
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesDa EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNessuna valutazione finora
- Feedback SystemDocumento3 pagineFeedback SystemSeanne Cruz100% (1)
- Three: Solving The Energy Balance Equation (TC "Solving The Energy Balance Equation" /L 1)Documento14 pagineThree: Solving The Energy Balance Equation (TC "Solving The Energy Balance Equation" /L 1)Nguyễn Văn HiếuNessuna valutazione finora
- Ac Electrical Circuit LabDocumento71 pagineAc Electrical Circuit LabtahiaNessuna valutazione finora
- Taller Cuatro Análisis de SistemasDocumento5 pagineTaller Cuatro Análisis de SistemasCarlosNessuna valutazione finora
- ES2A7 - Fluid Mechanics Example Classes Example Questions (Set IV)Documento8 pagineES2A7 - Fluid Mechanics Example Classes Example Questions (Set IV)Alejandro PerezNessuna valutazione finora
- Tutorial 2: System Dynamics and Process StructuresDocumento4 pagineTutorial 2: System Dynamics and Process StructuresggleichgesinntenNessuna valutazione finora
- Analog Communication - AM ModulatorsDocumento5 pagineAnalog Communication - AM ModulatorsB.Prashant JhaNessuna valutazione finora
- Notes LT2Documento20 pagineNotes LT2Zaw Phyo OoNessuna valutazione finora
- Lab Script Exp 3 (Fourier Synthesis)Documento12 pagineLab Script Exp 3 (Fourier Synthesis)mouazam KhalidNessuna valutazione finora
- Bouncy ChudinovDocumento8 pagineBouncy Chudinovthefallenghost6108Nessuna valutazione finora
- The Finite Difference Method For Transient Convection-Diffusion ProblemsDocumento10 pagineThe Finite Difference Method For Transient Convection-Diffusion ProblemsSamuelHericNessuna valutazione finora
- Tutorial2 SolutionDocumento9 pagineTutorial2 SolutionSam StideNessuna valutazione finora
- 10.1 Laplace Transfer Functions For BuildingThermal ControlDocumento7 pagine10.1 Laplace Transfer Functions For BuildingThermal ControlMiguel Flores ZepedaNessuna valutazione finora
- Square Law Modulator: A cos (2π f t)Documento6 pagineSquare Law Modulator: A cos (2π f t)Cicero LuNessuna valutazione finora
- Thermodynamics Lab: ProjectDocumento10 pagineThermodynamics Lab: ProjectSaAhRaNessuna valutazione finora
- Pendulum PDFDocumento8 paginePendulum PDFMohammad AhmerNessuna valutazione finora
- Zero and First Order HoldDocumento6 pagineZero and First Order Holdnirmal_inboxNessuna valutazione finora
- Last Name, First CHE426:: F C V C V C F + F F CDocumento6 pagineLast Name, First CHE426:: F C V C V C F + F F Clợi trầnNessuna valutazione finora
- Task 1 (L02: P2.1) Kelvin Plank Statement: Efficiency Efficiency (1 Qout QinDocumento16 pagineTask 1 (L02: P2.1) Kelvin Plank Statement: Efficiency Efficiency (1 Qout Qinedd bazNessuna valutazione finora
- Analysis of A Heated Batch VesselDocumento8 pagineAnalysis of A Heated Batch VesselMustafa MohamedNessuna valutazione finora
- EE207 Min1 SolsDocumento3 pagineEE207 Min1 SolsSumit BahlNessuna valutazione finora
- EE207 Problem Set 1Documento2 pagineEE207 Problem Set 1Rishabh AgarwalNessuna valutazione finora
- EE207 Problem Set 5 - 240217 - 181137Documento10 pagineEE207 Problem Set 5 - 240217 - 181137sumithasreekumar5Nessuna valutazione finora
- Introduction To Classical Linear Control SystemsDocumento7 pagineIntroduction To Classical Linear Control SystemsDj OoNessuna valutazione finora
- PHP RZ I LBWDocumento20 paginePHP RZ I LBWiiojnjnNessuna valutazione finora
- Laplace Transfom: T-Translation Rule 18.031, Haynes Miller and Jeremy OrloffDocumento6 pagineLaplace Transfom: T-Translation Rule 18.031, Haynes Miller and Jeremy OrloffĐức ViệtNessuna valutazione finora
- Laplace T Shift PDFDocumento6 pagineLaplace T Shift PDFAbhishekNessuna valutazione finora
- Sample Problems: 112-Topic 9: Inductance & Transient DC Circuit ProblemsDocumento7 pagineSample Problems: 112-Topic 9: Inductance & Transient DC Circuit ProblemssumithraNessuna valutazione finora
- EE207 Problem Set 1 IIT ROPARDocumento7 pagineEE207 Problem Set 1 IIT ROPARsumithasreekumar5Nessuna valutazione finora
- Appendix A. The DQ TransformationDocumento8 pagineAppendix A. The DQ TransformationtiagokjNessuna valutazione finora
- = cos 4 = cos π 2 − 2sin π 3 − sin π 4 = sin 2t = 2e: a. x (n) n t t t c. x (t) d. x (n)Documento2 pagine= cos 4 = cos π 2 − 2sin π 3 − sin π 4 = sin 2t = 2e: a. x (n) n t t t c. x (t) d. x (n)JB NavarroNessuna valutazione finora
- Signals AnalysisDocumento6 pagineSignals AnalysisVenkata Sathish Kumar BNessuna valutazione finora
- Variance and Volatility Swaps in Energy Markets: Research Is Supported by NSERCDocumento11 pagineVariance and Volatility Swaps in Energy Markets: Research Is Supported by NSERCPetr GorlichNessuna valutazione finora
- Damped Simple Harmonic Motion - Critical DampingDocumento13 pagineDamped Simple Harmonic Motion - Critical DampingRohan MohataNessuna valutazione finora
- EEE211 Assignment 1Documento5 pagineEEE211 Assignment 1Samina TohfaNessuna valutazione finora
- EEE 303 HW # 1 SolutionsDocumento22 pagineEEE 303 HW # 1 SolutionsDhirendra Kumar SinghNessuna valutazione finora
- The Laplace Transform of A Periodic FunctionDocumento4 pagineThe Laplace Transform of A Periodic FunctionWisdom Academy029Nessuna valutazione finora
- Laplace Transform: 2.1 What Are Laplace Transforms, and Why?Documento23 pagineLaplace Transform: 2.1 What Are Laplace Transforms, and Why?AHMED ALI S ALAHMADINessuna valutazione finora
- TP 02: Shannon's Theorem: BjectiveDocumento2 pagineTP 02: Shannon's Theorem: Bjectiveឆាម វ៉ាន់នូវNessuna valutazione finora
- AERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumDocumento5 pagineAERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumMD GOLAM SARWARNessuna valutazione finora
- 2010 Fall With SolutionsDocumento36 pagine2010 Fall With SolutionsRay MondoNessuna valutazione finora
- Transfer Function and Controller DesignDocumento14 pagineTransfer Function and Controller DesignBart llNessuna valutazione finora
- ELEC3400 Signal Processing Course NotesDocumento68 pagineELEC3400 Signal Processing Course NotesCallan Fair BearNessuna valutazione finora
- SPRING 2003 C A.H. Techet & M.S. Triantafyllou: T T 3 3 1 1 N N 1Documento13 pagineSPRING 2003 C A.H. Techet & M.S. Triantafyllou: T T 3 3 1 1 N N 1bzuiaoqNessuna valutazione finora
- Bitstream 1780177 PDFDocumento15 pagineBitstream 1780177 PDFSebastián Arbeláez LópezNessuna valutazione finora
- Introduction To Olecular Ynamics Simulations Using: M D LammpsDocumento86 pagineIntroduction To Olecular Ynamics Simulations Using: M D Lammpskroidman100% (2)
- Lecture 3Documento37 pagineLecture 3Kirubel MulugetaNessuna valutazione finora
- Tutorial 2 - 2023Documento3 pagineTutorial 2 - 2023Aina BalqisNessuna valutazione finora
- Solutions To Exercises: Chapter 10: 10.1 Use The Chemical Potential of An Ideal Gas in (10.1.9) and Obtain The BarometricDocumento6 pagineSolutions To Exercises: Chapter 10: 10.1 Use The Chemical Potential of An Ideal Gas in (10.1.9) and Obtain The BarometricSalomé TorresNessuna valutazione finora
- Physics Olympiad Preparation Program 2010-2011: - University of TorontoDocumento10 paginePhysics Olympiad Preparation Program 2010-2011: - University of TorontoDiyary Omar KakilNessuna valutazione finora
- Heat TransferDocumento164 pagineHeat TransferPOOJA VERMANessuna valutazione finora
- Assign1 2020Documento4 pagineAssign1 2020Zulqarnain KhanNessuna valutazione finora
- MATH 219: Spring 2021-22Documento14 pagineMATH 219: Spring 2021-22HesapNessuna valutazione finora
- Home Work of Process ControlDocumento5 pagineHome Work of Process ControlIqra SafdarNessuna valutazione finora
- 4501 Homework04solDocumento9 pagine4501 Homework04solDaudi Erasto MlangiNessuna valutazione finora
- CMM Cable ManualDocumento69 pagineCMM Cable ManualCDELVO1382Nessuna valutazione finora
- Information Security Logical DesignDocumento17 pagineInformation Security Logical DesignnskaralsathyaNessuna valutazione finora
- Try These: 1.4 Rational Numbers Between Two Rational NumbersDocumento1 paginaTry These: 1.4 Rational Numbers Between Two Rational NumbersLokendraNessuna valutazione finora
- LM78S40 Switching Voltage Regulator Applications: National Semiconductor Application Note 711 March 2000Documento17 pagineLM78S40 Switching Voltage Regulator Applications: National Semiconductor Application Note 711 March 2000Pravin MevadaNessuna valutazione finora
- DirectionalEQManual PDFDocumento2 pagineDirectionalEQManual PDFdorutNessuna valutazione finora
- Lab 1Documento8 pagineLab 1Masud SarkerNessuna valutazione finora
- Electronic Modular Control Panel II - para Motores EUIDocumento168 pagineElectronic Modular Control Panel II - para Motores EUIRobert Orosco B.Nessuna valutazione finora
- 2022 Visual Object Tracking A SurveyDocumento42 pagine2022 Visual Object Tracking A SurveyPaulNessuna valutazione finora
- Agenda: - What's A Microcontroller?Documento38 pagineAgenda: - What's A Microcontroller?Hoang Dung SonNessuna valutazione finora
- Full Download Ebook PDF Fundamentals of Modern Manufacturing Materials Processes and Systems 6th Edition PDFDocumento42 pagineFull Download Ebook PDF Fundamentals of Modern Manufacturing Materials Processes and Systems 6th Edition PDFruth.white442100% (37)
- Iedscout: Versatile Software Tool For Working With Iec 61850 DevicesDocumento12 pagineIedscout: Versatile Software Tool For Working With Iec 61850 DeviceshmhaidarNessuna valutazione finora
- Green Mode Power Switch For Valley Switching Converter - Low EMI and High Efficiency FSQ0365, FSQ0265, FSQ0165, FSQ321Documento22 pagineGreen Mode Power Switch For Valley Switching Converter - Low EMI and High Efficiency FSQ0365, FSQ0265, FSQ0165, FSQ321Mekkati MekkatiNessuna valutazione finora
- Air Compressor Daisy Chain Termination - Rev 0Documento1 paginaAir Compressor Daisy Chain Termination - Rev 0mounrNessuna valutazione finora
- Installation Instructions Avramis River MT4Documento7 pagineInstallation Instructions Avramis River MT4Muhammad HamzaNessuna valutazione finora
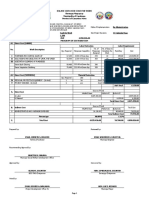
- CLUSTER 1-Magsaysay-WSPPRDocumento18 pagineCLUSTER 1-Magsaysay-WSPPRJopheth RelucioNessuna valutazione finora
- FAA Safety Briefing Nov-Dec 2017 PDFDocumento36 pagineFAA Safety Briefing Nov-Dec 2017 PDFAllison JacobsonNessuna valutazione finora
- 121 A3 Apr 2019 PDFDocumento4 pagine121 A3 Apr 2019 PDFSudhakarNessuna valutazione finora
- Can Internal Excellence Be Measured - DeshpandeDocumento11 pagineCan Internal Excellence Be Measured - DeshpandeFelipeNessuna valutazione finora
- Monsoon Safety PlanDocumento4 pagineMonsoon Safety PlanSajal100% (1)
- Liquid Crystal Display Module MODEL: NMTG-S12232CFYHSGY-10 Customer's No.Documento21 pagineLiquid Crystal Display Module MODEL: NMTG-S12232CFYHSGY-10 Customer's No.Игорь НесвитNessuna valutazione finora
- Effect of Mobile Marketing On YoungstersDocumento33 pagineEffect of Mobile Marketing On Youngsterssaloni singhNessuna valutazione finora
- DVR User Manual: For H.264 4/8/16-Channel Digital Video Recorder All Rights ReservedDocumento73 pagineDVR User Manual: For H.264 4/8/16-Channel Digital Video Recorder All Rights ReservedchnkhrmnNessuna valutazione finora
- LOGO-Simply Ingenious For Small AutomationDocumento8 pagineLOGO-Simply Ingenious For Small Automationcc_bauNessuna valutazione finora
- Computer and Network Security: Dan Boneh and John MitchellDocumento60 pagineComputer and Network Security: Dan Boneh and John Mitchell19001015049 ROHITNessuna valutazione finora
- Chapter 7 - Inheritance and InterfacesDocumento53 pagineChapter 7 - Inheritance and Interfacesvicrattlehead2013Nessuna valutazione finora
- EF4e Int EndtestB AnswersheetDocumento2 pagineEF4e Int EndtestB AnswersheetB Mc0% (1)
- Problem Set No.2 SolutionDocumento9 pagineProblem Set No.2 SolutionAshley Quinn MorganNessuna valutazione finora
- CRT Learning Module: Course Code Course Title No. of Hours Module TitleDocumento16 pagineCRT Learning Module: Course Code Course Title No. of Hours Module TitleEiszel CadacioNessuna valutazione finora
- Pacific General ManualDocumento53 paginePacific General Manualroi_marketingNessuna valutazione finora
- Basic Nonlinear Analysis User's Guide: Siemens Siemens SiemensDocumento144 pagineBasic Nonlinear Analysis User's Guide: Siemens Siemens Siemensபென்ஸிஹர்Nessuna valutazione finora
- Guidelines for Chemical Process Quantitative Risk AnalysisDa EverandGuidelines for Chemical Process Quantitative Risk AnalysisValutazione: 5 su 5 stelle5/5 (1)
- Sodium Bicarbonate: Nature's Unique First Aid RemedyDa EverandSodium Bicarbonate: Nature's Unique First Aid RemedyValutazione: 5 su 5 stelle5/5 (21)
- Pulp and Paper Industry: Emerging Waste Water Treatment TechnologiesDa EverandPulp and Paper Industry: Emerging Waste Water Treatment TechnologiesValutazione: 5 su 5 stelle5/5 (1)
- Phase Equilibria in Chemical EngineeringDa EverandPhase Equilibria in Chemical EngineeringValutazione: 4 su 5 stelle4/5 (11)
- Well Control for Completions and InterventionsDa EverandWell Control for Completions and InterventionsValutazione: 4 su 5 stelle4/5 (10)
- Coupled CFD-DEM Modeling: Formulation, Implementation and Application to Multiphase FlowsDa EverandCoupled CFD-DEM Modeling: Formulation, Implementation and Application to Multiphase FlowsNessuna valutazione finora
- Process Plant Equipment: Operation, Control, and ReliabilityDa EverandProcess Plant Equipment: Operation, Control, and ReliabilityValutazione: 5 su 5 stelle5/5 (1)
- The Perfumed Pages of History: A Textbook on Fragrance CreationDa EverandThe Perfumed Pages of History: A Textbook on Fragrance CreationValutazione: 4 su 5 stelle4/5 (1)
- Lees' Process Safety Essentials: Hazard Identification, Assessment and ControlDa EverandLees' Process Safety Essentials: Hazard Identification, Assessment and ControlValutazione: 4 su 5 stelle4/5 (4)
- Water-Based Paint Formulations, Vol. 3Da EverandWater-Based Paint Formulations, Vol. 3Valutazione: 4.5 su 5 stelle4.5/5 (6)
- Functional Safety from Scratch: A Practical Guide to Process Industry ApplicationsDa EverandFunctional Safety from Scratch: A Practical Guide to Process Industry ApplicationsNessuna valutazione finora
- An Applied Guide to Water and Effluent Treatment Plant DesignDa EverandAn Applied Guide to Water and Effluent Treatment Plant DesignValutazione: 5 su 5 stelle5/5 (4)
- Fundamentals of Risk Management for Process Industry EngineersDa EverandFundamentals of Risk Management for Process Industry EngineersNessuna valutazione finora
- A Chemical Engineer in the Palm Oil Milling IndustryDa EverandA Chemical Engineer in the Palm Oil Milling IndustryNessuna valutazione finora
- Fun Facts about Hydrogen : Chemistry for Kids The Element Series | Children's Chemistry BooksDa EverandFun Facts about Hydrogen : Chemistry for Kids The Element Series | Children's Chemistry BooksNessuna valutazione finora
- Principles and Case Studies of Simultaneous DesignDa EverandPrinciples and Case Studies of Simultaneous DesignNessuna valutazione finora
- Nuclear Energy in the 21st Century: World Nuclear University PressDa EverandNuclear Energy in the 21st Century: World Nuclear University PressValutazione: 4.5 su 5 stelle4.5/5 (3)
- Distillation Design and Control Using Aspen SimulationDa EverandDistillation Design and Control Using Aspen SimulationValutazione: 5 su 5 stelle5/5 (2)
- High Pressure Phase Behaviour of Multicomponent Fluid MixturesDa EverandHigh Pressure Phase Behaviour of Multicomponent Fluid MixturesNessuna valutazione finora
- First U.K. National Conference on Heat Transfer: The Institution of Chemical Engineers Symposium Series, Volume 2.86Da EverandFirst U.K. National Conference on Heat Transfer: The Institution of Chemical Engineers Symposium Series, Volume 2.86Nessuna valutazione finora
- The Stress Analysis of Pressure Vessels and Pressure Vessel Components: International Series of Monographs in Mechanical EngineeringDa EverandThe Stress Analysis of Pressure Vessels and Pressure Vessel Components: International Series of Monographs in Mechanical EngineeringS. S. GillValutazione: 3.5 su 5 stelle3.5/5 (3)
- A New Approach to HAZOP of Complex Chemical ProcessesDa EverandA New Approach to HAZOP of Complex Chemical ProcessesNessuna valutazione finora
- Physical and Chemical Equilibrium for Chemical EngineersDa EverandPhysical and Chemical Equilibrium for Chemical EngineersValutazione: 5 su 5 stelle5/5 (1)
- The Periodic Table of Elements - Halogens, Noble Gases and Lanthanides and Actinides | Children's Chemistry BookDa EverandThe Periodic Table of Elements - Halogens, Noble Gases and Lanthanides and Actinides | Children's Chemistry BookNessuna valutazione finora