Potrebbero piacerti anche
- Cuadernillo Mate. 7ºgrado P. JoseDocumento66 pagineCuadernillo Mate. 7ºgrado P. JoseJulieta VillagraNessuna valutazione finora
- Introducción Al Estudio de Las Ecuaciones DiferencialesDocumento11 pagineIntroducción Al Estudio de Las Ecuaciones DiferencialesJulieta VillagraNessuna valutazione finora
- Cuadernillo Mate. 9º P. JoseDocumento52 pagineCuadernillo Mate. 9º P. JoseJulieta VillagraNessuna valutazione finora
- Transformación de CoordenadasDocumento14 pagineTransformación de CoordenadasJulieta VillagraNessuna valutazione finora
- Línea RectaDocumento15 pagineLínea RectaJulieta VillagraNessuna valutazione finora
- VectoresDocumento11 pagineVectoresJulieta VillagraNessuna valutazione finora
- Gráfica de Una Ecuación y Lugares GeométricosDocumento13 pagineGráfica de Una Ecuación y Lugares GeométricosJulieta VillagraNessuna valutazione finora
- ML-Cuerpos Geométricos-U5Documento13 pagineML-Cuerpos Geométricos-U5Julieta VillagraNessuna valutazione finora
- ML Trignometria U7Documento13 pagineML Trignometria U7Julieta VillagraNessuna valutazione finora
- ML-Resolución de Triangulos Planos-U10Documento13 pagineML-Resolución de Triangulos Planos-U10Julieta VillagraNessuna valutazione finora
- ML-Geometría en El Espacio-U4Documento9 pagineML-Geometría en El Espacio-U4Julieta VillagraNessuna valutazione finora
- ML-Funciones Trigonométricas de La Suma, Diferencia, Producto-U9Documento16 pagineML-Funciones Trigonométricas de La Suma, Diferencia, Producto-U9Julieta VillagraNessuna valutazione finora
- ML-Figuras Geométricas-U2Documento14 pagineML-Figuras Geométricas-U2Julieta VillagraNessuna valutazione finora
- ML-Circunferencia y Círculo-U3Documento14 pagineML-Circunferencia y Círculo-U3Julieta VillagraNessuna valutazione finora
- Arit UVII MLDocumento13 pagineArit UVII MLJulieta VillagraNessuna valutazione finora
- ValknutDocumento2 pagineValknutMarcelo NóbregaNessuna valutazione finora
- Proyecto Comunicacion Social 2013 NORA BOBAREDocumento54 pagineProyecto Comunicacion Social 2013 NORA BOBAREElaineNessuna valutazione finora
- Itinerarios para La Formación de Catequistas - Guía Del FormadorDocumento262 pagineItinerarios para La Formación de Catequistas - Guía Del FormadorÚbeda Ansgar67% (3)
- Examen Parcial Del Curso de Derecho Procesal LaboralDocumento9 pagineExamen Parcial Del Curso de Derecho Procesal LaboralCesar VelaNessuna valutazione finora
- Acuérdate María LetrasDocumento3 pagineAcuérdate María LetrasCarmin Arianna Del Orbe TorresNessuna valutazione finora
- Diagnostico Plan UrbanoDocumento87 pagineDiagnostico Plan UrbanoLizethDelRosarioSotoCardenasNessuna valutazione finora
- GT14. Normas de SeguridadDocumento8 pagineGT14. Normas de Seguridad001jehuty001Nessuna valutazione finora
- Autorización A Persona Juridica para Vender Vehículo en ConsignaciónDocumento2 pagineAutorización A Persona Juridica para Vender Vehículo en ConsignaciónGerardo AmosNessuna valutazione finora
- 001informegeneral Violencia Feminicida en 10 EntidadesDocumento361 pagine001informegeneral Violencia Feminicida en 10 EntidadesGreta KnososNessuna valutazione finora
- Lluvia de IdeasDocumento28 pagineLluvia de IdeasVanessa Belon DiazNessuna valutazione finora
- Mujer MillonariaDocumento7 pagineMujer MillonariaLizBell5Nessuna valutazione finora
- Diagrama de Flujo Panque de ZanahoriaDocumento1 paginaDiagrama de Flujo Panque de ZanahoriaSugey de Omar100% (1)
- Expansion AlemanaDocumento9 pagineExpansion AlemanaAlex Santiago SánchezNessuna valutazione finora
- Factores de ProduccionDocumento1 paginaFactores de ProduccionDiana Milena CamachoNessuna valutazione finora
- David Roll - Los Partidos Tradicionales en Colombia. Entre El Debilitamiento y La PersistenciaDocumento345 pagineDavid Roll - Los Partidos Tradicionales en Colombia. Entre El Debilitamiento y La PersistenciaMariana PinzónNessuna valutazione finora
- El Corazon Delator-Allan Poe EdgarDocumento7 pagineEl Corazon Delator-Allan Poe EdgarCelia EscalonaNessuna valutazione finora
- Memorias Alcantarillado Sanitario - Ago13Documento47 pagineMemorias Alcantarillado Sanitario - Ago13Jorge Eduardo GálvezNessuna valutazione finora
- Casos de Judd y CarolineDocumento5 pagineCasos de Judd y CarolineLorena Esquivel75% (4)
- Evaluacion CAPACITACIÓNDocumento3 pagineEvaluacion CAPACITACIÓNestrella arias de los santosNessuna valutazione finora
- Redacción Y Comprensión de Textos: Tema 1Documento26 pagineRedacción Y Comprensión de Textos: Tema 1VICTOR LEONARDO INDIO ASUNCIONNessuna valutazione finora
- Ley de Okun en El PeruDocumento41 pagineLey de Okun en El PeruAldo Rojas Sánchez100% (1)
- El Arte Comprometido en España en Los 70 y 80Documento798 pagineEl Arte Comprometido en España en Los 70 y 80rocksie100% (1)
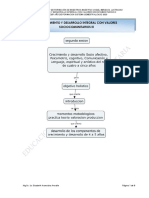
- U.F Crecimiento Y Desarrollo Integral Con Valores Sociocomunitarios IiiDocumento8 pagineU.F Crecimiento Y Desarrollo Integral Con Valores Sociocomunitarios IiiPriscila PardoNessuna valutazione finora
- La Pequeña Coral de La Señorita Collignon MuestraDocumento11 pagineLa Pequeña Coral de La Señorita Collignon MuestravaquezticonaeduardodanielNessuna valutazione finora
- Material 13 EstrategiaDocumento5 pagineMaterial 13 EstrategiaJaime Mauricio Caceres LealNessuna valutazione finora
- La Materia. Leyes Ponderales. El Mol.Documento28 pagineLa Materia. Leyes Ponderales. El Mol.Maria LopezNessuna valutazione finora
- Historia de Las IdeasDocumento7 pagineHistoria de Las Ideasrenata luza portillaNessuna valutazione finora
- COMUNICACIÓN EMPRESARIAL E IMAGEN CORPORATIVA (6) Teoria ExamenDocumento6 pagineCOMUNICACIÓN EMPRESARIAL E IMAGEN CORPORATIVA (6) Teoria ExamenIsabel Ceballos RuizNessuna valutazione finora
- El Camino Del Libertario (Javier Milei)Documento327 pagineEl Camino Del Libertario (Javier Milei)GustavoLacroix80% (20)
- Gestion de Agencias Publicitarias 01.2Documento24 pagineGestion de Agencias Publicitarias 01.2Claudia Levano RetesNessuna valutazione finora