Potrebbero piacerti anche
- Mechanical Vibrations and Condition MonitoringDa EverandMechanical Vibrations and Condition MonitoringValutazione: 5 su 5 stelle5/5 (1)
- Effectiveness of A Novel Sensor Selection Algorithm in PEM Fuel Cell On-Line DiagnosisDocumento10 pagineEffectiveness of A Novel Sensor Selection Algorithm in PEM Fuel Cell On-Line DiagnosisMohmmed MahmoudNessuna valutazione finora
- Engine Working State Recognition Based On Optimized Variational Mode Decomposition and Expectation Maximization AlgorithmDocumento15 pagineEngine Working State Recognition Based On Optimized Variational Mode Decomposition and Expectation Maximization Algorithmtristanbenito80Nessuna valutazione finora
- Design of A Multi-Model Observer-Based Estimator For Fault Detection and Isolation (Fdi) Strategy: Application To A Chemical ReactorDocumento12 pagineDesign of A Multi-Model Observer-Based Estimator For Fault Detection and Isolation (Fdi) Strategy: Application To A Chemical ReactorAfshaNessuna valutazione finora
- T Assine 2017Documento8 pagineT Assine 2017Nathan RodriguesNessuna valutazione finora
- Analysis of Permanent Magnet Synchronous MotorDocumento15 pagineAnalysis of Permanent Magnet Synchronous Motormalini72Nessuna valutazione finora
- Ju (2016)Documento14 pagineJu (2016)Iago Freitas de AlmeidaNessuna valutazione finora
- A New Bearing Fault Diagnosis Method Based On Modified Convolutional Neural NetworksDocumento9 pagineA New Bearing Fault Diagnosis Method Based On Modified Convolutional Neural NetworksRobert MaximilianNessuna valutazione finora
- Amozegar 2016Documento17 pagineAmozegar 2016Leroy Lionel SonfackNessuna valutazione finora
- Visual inspe-WPS OfficeDocumento2 pagineVisual inspe-WPS OfficeAjhay Krishna K SNessuna valutazione finora
- Referensi 4Documento15 pagineReferensi 4Anonymous ugAY1fsF0aNessuna valutazione finora
- Wind Turbine Condition Monitoring Based On SCADA Data Using Normal Behavior Models Part 1 System DescriptionDocumento12 pagineWind Turbine Condition Monitoring Based On SCADA Data Using Normal Behavior Models Part 1 System Descriptionbendiazz3430Nessuna valutazione finora
- Mir Hossein I 2019Documento13 pagineMir Hossein I 2019MahsaNessuna valutazione finora
- DiagnosticsDocumento4 pagineDiagnostics16061977Nessuna valutazione finora
- Optimal Sensor Placement For Spatial Lattice Structure Based On Genetic AlgorithmsDocumento0 pagineOptimal Sensor Placement For Spatial Lattice Structure Based On Genetic AlgorithmsMayank SinghNessuna valutazione finora
- 2 PDFDocumento15 pagine2 PDFAtoui IssamNessuna valutazione finora
- A-Evaluación Del Rendimiento de La Combustión de Un Motor Alternativo Diesel Bajo Diversas Mezclas de Combustible Utilizando Un Enfoque Basado en La Vibración de La Serie Temporal de Cálculo PDFDocumento10 pagineA-Evaluación Del Rendimiento de La Combustión de Un Motor Alternativo Diesel Bajo Diversas Mezclas de Combustible Utilizando Un Enfoque Basado en La Vibración de La Serie Temporal de Cálculo PDFjhon mario perez carreñoNessuna valutazione finora
- Bearing DefectsDocumento13 pagineBearing Defectsjoshibec100% (1)
- Condition-Based Maintenance: Model vs. Statistics A Performance ComparisonDocumento7 pagineCondition-Based Maintenance: Model vs. Statistics A Performance ComparisonLourds Egúsquiza EscuderoNessuna valutazione finora
- 11 - Performance Analysis of Electrical Signature Analysis-Based Diagnostics Using An Electromechanical Model of Wind TurbineDocumento27 pagine11 - Performance Analysis of Electrical Signature Analysis-Based Diagnostics Using An Electromechanical Model of Wind TurbineRafa Otero EscuderoNessuna valutazione finora
- Vibration Analysis of Rotary Machines Using Machine Learning TechniquesDocumento6 pagineVibration Analysis of Rotary Machines Using Machine Learning TechniquesBruno RibeiroNessuna valutazione finora
- Remaining Useful Life Prediction of Ball-Bearings Based On High-Frequency Vibration FeaturesDocumento12 pagineRemaining Useful Life Prediction of Ball-Bearings Based On High-Frequency Vibration FeaturesangeloNessuna valutazione finora
- Preprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningDocumento13 paginePreprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningCesar Vargas ArayaNessuna valutazione finora
- Gas Turbine Modeling Using Adaptive Fuzzy Neural Network Approach Based On Measured Data ClassificationDocumento14 pagineGas Turbine Modeling Using Adaptive Fuzzy Neural Network Approach Based On Measured Data ClassificationacebenkeiNessuna valutazione finora
- Aerospace: Probabilistic Model For Aero-Engines Fleet Condition MonitoringDocumento19 pagineAerospace: Probabilistic Model For Aero-Engines Fleet Condition MonitoringJeeEianYannNessuna valutazione finora
- Phase 2 ReportDocumento20 paginePhase 2 ReportSusheel PoonjaNessuna valutazione finora
- Research Paper 2Documento11 pagineResearch Paper 2Amal sajikumarNessuna valutazione finora
- Development of A Methodology For ConditiDocumento19 pagineDevelopment of A Methodology For ConditiAmag2011Nessuna valutazione finora
- Hines Et Al-2007-Quality and Reliability Engineering InternationalDocumento13 pagineHines Et Al-2007-Quality and Reliability Engineering InternationalSuanu NwigboNessuna valutazione finora
- Ali SaadDocumento6 pagineAli SaadEri SukocoNessuna valutazione finora
- 1 s2.0 S1877050917314266 MainDocumento8 pagine1 s2.0 S1877050917314266 Mainmegawati vika pNessuna valutazione finora
- 1 s2.0 S0263224121002402 MainDocumento19 pagine1 s2.0 S0263224121002402 Mainvikas sharmaNessuna valutazione finora
- A Regularized Deep Clustering Method For Fault Trend AnalysisDocumento7 pagineA Regularized Deep Clustering Method For Fault Trend AnalysisCarel N'shimbiNessuna valutazione finora
- Condition Monitoring of Wind Turbine Gearbox Bearing Based On Deep Learning ModelDocumento10 pagineCondition Monitoring of Wind Turbine Gearbox Bearing Based On Deep Learning ModelDarshan PatilNessuna valutazione finora
- Detection and Interactive Isolation of Faults in Steam Turbines ToDocumento15 pagineDetection and Interactive Isolation of Faults in Steam Turbines ToJessica SandersNessuna valutazione finora
- Computers in Industry: Adolfo Crespo Márquez, Antonio de La Fuente Carmona, José Antonio Marcos, Javier NavarroDocumento13 pagineComputers in Industry: Adolfo Crespo Márquez, Antonio de La Fuente Carmona, José Antonio Marcos, Javier NavarroPeter Guerrero BacaNessuna valutazione finora
- Vibration Signal Diagnosis and Analysis of Rotating Machine by Utilizing Cloud ComputingDocumento10 pagineVibration Signal Diagnosis and Analysis of Rotating Machine by Utilizing Cloud ComputingDrRajeev ChauhanNessuna valutazione finora
- Fault Detection For Wind Turbine Blade Bolts Based On GSG Combined With CS-LightGBMDocumento18 pagineFault Detection For Wind Turbine Blade Bolts Based On GSG Combined With CS-LightGBMTiago Kaoru MatsuoNessuna valutazione finora
- Applmech 04 00020Documento15 pagineApplmech 04 00020jose manuel gomez jimenezNessuna valutazione finora
- A Feature Extraction and Machine Learning Framework For Bearing Fault DiagnosiDocumento11 pagineA Feature Extraction and Machine Learning Framework For Bearing Fault DiagnosiDav KhNessuna valutazione finora
- Audio-Based Fault Diagnosis For Belt Conveyor RollersDocumento10 pagineAudio-Based Fault Diagnosis For Belt Conveyor RollersJoão SoaresNessuna valutazione finora
- 10 1016@j Cja 2019 04 018Documento9 pagine10 1016@j Cja 2019 04 018juanjosesaucedodorantesNessuna valutazione finora
- A Study On Extreme Learning Machine For Gasoline EDocumento13 pagineA Study On Extreme Learning Machine For Gasoline EWilliam Ricardo RosaNessuna valutazione finora
- Materials: Prediction of Tool Wear Using Artificial Neural Networks During Turning of Hardened SteelDocumento15 pagineMaterials: Prediction of Tool Wear Using Artificial Neural Networks During Turning of Hardened Steelrub786Nessuna valutazione finora
- Neural Network To EngineDocumento25 pagineNeural Network To EngineaaNessuna valutazione finora
- 陌陌陌陌莫迪Documento9 pagine陌陌陌陌莫迪363331272Nessuna valutazione finora
- Energies 16 03429Documento20 pagineEnergies 16 03429Krishna KumarNessuna valutazione finora
- On The Improvement of Calibration Accuracy of Parallel Robots - Modeling and OptimizationDocumento13 pagineOn The Improvement of Calibration Accuracy of Parallel Robots - Modeling and OptimizationKrasimira KolevaNessuna valutazione finora
- A Simple Method For Dimensional Measurement of Ring-Shaped Objects Using Image Processing TechniqueDocumento22 pagineA Simple Method For Dimensional Measurement of Ring-Shaped Objects Using Image Processing TechniqueGogyNessuna valutazione finora
- Model-Based Prognostics of Gear Health Using Stochastic Non-Linear Dynamical ModelsDocumento6 pagineModel-Based Prognostics of Gear Health Using Stochastic Non-Linear Dynamical Modelsejlebe mekaniNessuna valutazione finora
- ML - Paper - 02 - Bearing Fault Diagnosis of Induction MotorsDocumento19 pagineML - Paper - 02 - Bearing Fault Diagnosis of Induction MotorsDEE MEMUNessuna valutazione finora
- An Evaluation of Engine Faults Diagnostics Using Artificial Neural NetworksDocumento8 pagineAn Evaluation of Engine Faults Diagnostics Using Artificial Neural NetworkssenthilNessuna valutazione finora
- Sensors: Naive Bayes Bearing Fault Diagnosis Based On Enhanced Independence of DataDocumento17 pagineSensors: Naive Bayes Bearing Fault Diagnosis Based On Enhanced Independence of DataSérgio CustódioNessuna valutazione finora
- The Common Fault Diagnosis Method of Diesel Engine: Zhibin Wang, Yu Zhao, Jian Yan and Jiafeng XuDocumento3 pagineThe Common Fault Diagnosis Method of Diesel Engine: Zhibin Wang, Yu Zhao, Jian Yan and Jiafeng XuNemer RaslenNessuna valutazione finora
- Vibrational Diagnostics of Rotating MachineryDocumento31 pagineVibrational Diagnostics of Rotating Machineryhuliplay100% (1)
- Recent Advancements in Aircraft Engine Health Management (EHM) Technologies and Recommendations For The Next StepDocumento13 pagineRecent Advancements in Aircraft Engine Health Management (EHM) Technologies and Recommendations For The Next StepDanu MamlukatNessuna valutazione finora
- 1 s2.0 S2405959521000096 MainDocumento8 pagine1 s2.0 S2405959521000096 MainRyan CoetzeeNessuna valutazione finora
- Bar Tilson 2015Documento12 pagineBar Tilson 2015Anonymous sQGjGjo7oNessuna valutazione finora
- Li Et Al. - 2020 - Bearing Fault Feature Selection Method Based On WeDocumento18 pagineLi Et Al. - 2020 - Bearing Fault Feature Selection Method Based On Weseyfu mogesNessuna valutazione finora
- Motion Magnificationfor Optical Based SHMDocumento8 pagineMotion Magnificationfor Optical Based SHMMuneer AhmedNessuna valutazione finora
- L05 - DumitriuDocumento9 pagineL05 - DumitriuLouisaMjjNessuna valutazione finora
- AlkylationDocumento42 pagineAlkylationRafi Algawi100% (1)
- The Difference Between Solid, Liquid, and Gaseous StatesDocumento9 pagineThe Difference Between Solid, Liquid, and Gaseous StatesFikriZalsyaNessuna valutazione finora
- C Programming Board Solve PDFDocumento12 pagineC Programming Board Solve PDFEstiak Hossain ShaikatNessuna valutazione finora
- Lebanese International University: CSCI 250 - Introduction To Programming - TEST-2: Student Name: Student IDDocumento5 pagineLebanese International University: CSCI 250 - Introduction To Programming - TEST-2: Student Name: Student IDralf tamerNessuna valutazione finora
- Training On Optical Fiber NetworkDocumento96 pagineTraining On Optical Fiber Networkpriyasingh1682100% (1)
- VentilationDocumento3 pagineVentilationasdasaNessuna valutazione finora
- Topic 2 - Exponential ModelsDocumento34 pagineTopic 2 - Exponential ModelsGabriel CharlesNessuna valutazione finora
- Thông Gió Cho T - Pdfslide - Net - Electrical-Cabinet-Vbcm-The-Electrical-Cabinet-Ventilation-Serves-To-MaintainDocumento26 pagineThông Gió Cho T - Pdfslide - Net - Electrical-Cabinet-Vbcm-The-Electrical-Cabinet-Ventilation-Serves-To-MaintainThành PhạmNessuna valutazione finora
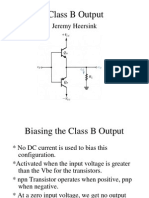
- Class B Output: Jeremy HeersinkDocumento10 pagineClass B Output: Jeremy Heersinkdummy1957jNessuna valutazione finora
- Seizmic Design of RE WallsDocumento49 pagineSeizmic Design of RE Wallsljubomirjocic@yahoo.com100% (1)
- Inductiveand Deductive Reasoning in Geometry October 27 2022Documento9 pagineInductiveand Deductive Reasoning in Geometry October 27 2022Seif DelawarNessuna valutazione finora
- Chapter 3 Digital ForensicsDocumento5 pagineChapter 3 Digital ForensicsAbhinav GadekarNessuna valutazione finora
- SLES Concentration Effect On The Rheolog TraducidoDocumento22 pagineSLES Concentration Effect On The Rheolog TraducidoJose GamezNessuna valutazione finora
- Ap Computer Science A Course OverviewDocumento2 pagineAp Computer Science A Course Overviewbaojia chenNessuna valutazione finora
- Dosing Technology: eco-CONTROL EC200-KDocumento2 pagineDosing Technology: eco-CONTROL EC200-KMario Vargas VegaNessuna valutazione finora
- Sanitizermachine ZeichenDocumento7 pagineSanitizermachine ZeichenprasannaNessuna valutazione finora
- Paragon Error Code InformationDocumento19 pagineParagon Error Code InformationnenulelelemaNessuna valutazione finora
- Spicer Info - AXSM-8663 PDFDocumento28 pagineSpicer Info - AXSM-8663 PDFRay Ayala100% (1)
- Technical Bulletin: Valbart Through Conduit Slab Gate ValveDocumento24 pagineTechnical Bulletin: Valbart Through Conduit Slab Gate ValveroscillaNessuna valutazione finora
- Mobile Communications: Chapter 4: Wireless Telecommunication SystemsDocumento108 pagineMobile Communications: Chapter 4: Wireless Telecommunication Systemsradislamy-1Nessuna valutazione finora
- SDH To EthernetDocumento23 pagineSDH To Ethernetpulkit_khNessuna valutazione finora
- Sequential Reliability TestsDocumento2 pagineSequential Reliability Teststanpreet_makkadNessuna valutazione finora
- Solutions Manual To Mathematical Analysis by Tom Apostol - Second Edition-Chapter OneDocumento67 pagineSolutions Manual To Mathematical Analysis by Tom Apostol - Second Edition-Chapter Oneayesha dollNessuna valutazione finora
- Quarter 1 Week 1Documento6 pagineQuarter 1 Week 1GhghaaaNessuna valutazione finora
- Windy Hill Middle School - Trumpet Warm Up BookDocumento61 pagineWindy Hill Middle School - Trumpet Warm Up BookGleyce VieiraNessuna valutazione finora
- What Is Not Said: Metaphor and The Deflationary Account: Chris GenovesiDocumento13 pagineWhat Is Not Said: Metaphor and The Deflationary Account: Chris GenovesimiprofesorjaviNessuna valutazione finora
- Solutions and Solubility 2021Documento3 pagineSolutions and Solubility 2021Mauro De LollisNessuna valutazione finora
- Ebook Remote Server ManagementDocumento10 pagineEbook Remote Server ManagementPiruletoNessuna valutazione finora
- Commissioning Example 797Documento15 pagineCommissioning Example 797linkangjun0621Nessuna valutazione finora