Potrebbero piacerti anche
- Algoritmos e Complexidade Notas de AulaDocumento430 pagineAlgoritmos e Complexidade Notas de AulaOsmael SilvaNessuna valutazione finora
- Álgebra II - EP12 - Semana 15Documento10 pagineÁlgebra II - EP12 - Semana 15Diego Silva0% (1)
- Otimização de horários de aulas com algoritmos genéticosDocumento7 pagineOtimização de horários de aulas com algoritmos genéticosLeandro PereiraNessuna valutazione finora
- Métodos quantitativos e qualitativos em administraçãoDocumento7 pagineMétodos quantitativos e qualitativos em administraçãoClécio Silva100% (1)
- Fecd PDFDocumento428 pagineFecd PDFMurilo Camargos100% (1)
- Álgebra Linear: Notas de AulaDocumento36 pagineÁlgebra Linear: Notas de AulaEmanuel SousaNessuna valutazione finora
- Transformação linear entre espaços vetoriaisDocumento11 pagineTransformação linear entre espaços vetoriaisAnderson VieiraNessuna valutazione finora
- Teoria Dos Números 1Documento153 pagineTeoria Dos Números 1WendelNessuna valutazione finora
- Escalonamento de matrizes na Algebra LinearDocumento156 pagineEscalonamento de matrizes na Algebra LinearRogério CardosoNessuna valutazione finora
- Minicurso AneisDocumento84 pagineMinicurso AneisGerman Chiappe100% (2)
- BC1429 - Teoria Dos GrafosDocumento40 pagineBC1429 - Teoria Dos GrafoskledermonNessuna valutazione finora
- Notas de Aula 01-EARDocumento21 pagineNotas de Aula 01-EARsusanaNessuna valutazione finora
- As I A IV - Algebra Linear IIDocumento24 pagineAs I A IV - Algebra Linear IIViviani Salomão Teixeira SiqueiraNessuna valutazione finora
- Apostila de Matemática Discreta - 2010 ReduzidaDocumento22 pagineApostila de Matemática Discreta - 2010 ReduzidamarcusqcastroNessuna valutazione finora
- MDC e divisibilidade em números inteirosDocumento42 pagineMDC e divisibilidade em números inteirosSara FariaNessuna valutazione finora
- Gabarito Do Teste Cps (1) ...Documento2 pagineGabarito Do Teste Cps (1) ...erickaNessuna valutazione finora
- Lista de exercícios de paridade e operações modularesDocumento2 pagineLista de exercícios de paridade e operações modularesWilson Bispo Dos Santos0% (1)
- Álgebra - Grupo - FamaDocumento2 pagineÁlgebra - Grupo - Famaapi-3799370Nessuna valutazione finora
- Cálculo III atividade avaliativa funções múltiplasDocumento27 pagineCálculo III atividade avaliativa funções múltiplasLarissa FiorotNessuna valutazione finora
- Variáveis Complexas 1.00 PDFDocumento24 pagineVariáveis Complexas 1.00 PDFMarcoags26Nessuna valutazione finora
- Aula 1 - 2020 - CURSOSDocumento6 pagineAula 1 - 2020 - CURSOSEfraim CostaNessuna valutazione finora
- Cardinais - Transfinitos PDFDocumento13 pagineCardinais - Transfinitos PDFJorge Luiz FerreiraNessuna valutazione finora
- Solucoes Dos Exercicios de Analise Do LiDocumento137 pagineSolucoes Dos Exercicios de Analise Do LiAlexsandro Dos Santos LimaNessuna valutazione finora
- 38118-Geometria AnaliticaDocumento87 pagine38118-Geometria AnaliticaRodrigo Schneider0% (1)
- Apostila de Aritmética e Teoria dos NúmerosDocumento61 pagineApostila de Aritmética e Teoria dos NúmerosFelipe SantiagoNessuna valutazione finora
- Matemática DiscretaDocumento12 pagineMatemática DiscretaFred ChaúqueNessuna valutazione finora
- Área de chapa metálica para latas cilíndricasDocumento25 pagineÁrea de chapa metálica para latas cilíndricasGilNessuna valutazione finora
- Funções de Várias VariáveisDocumento7 pagineFunções de Várias VariáveisLeonardo GuimarãesNessuna valutazione finora
- Cálculo 3-A (Teorema de Green)Documento12 pagineCálculo 3-A (Teorema de Green)Henrique EmeryNessuna valutazione finora
- AH (Séries Trigonométricas de Fourier)Documento30 pagineAH (Séries Trigonométricas de Fourier)Caito Jorge MurabiuaNessuna valutazione finora
- Aritmética básica: conceitos numéricos e operações fundamentaisDocumento50 pagineAritmética básica: conceitos numéricos e operações fundamentaisSantebergeNessuna valutazione finora
- Lista9 AritmeticaDocumento2 pagineLista9 AritmeticaRobson Franklin Aguiar CoutoNessuna valutazione finora
- Cálculo exterior para físicos: uma introduçãoDocumento188 pagineCálculo exterior para físicos: uma introduçãoirancelioNessuna valutazione finora
- Analise Real - Notas Aula CEDERJDocumento204 pagineAnalise Real - Notas Aula CEDERJRafael RosbackNessuna valutazione finora
- Exercícios de espaços vetoriais e subespaçosDocumento20 pagineExercícios de espaços vetoriais e subespaçosThaís Martins100% (1)
- Funções Lineares e Espaço DualDocumento38 pagineFunções Lineares e Espaço DualHenrique LimaNessuna valutazione finora
- Representação numérica em computadores e erros de conversão binário-decimalDocumento70 pagineRepresentação numérica em computadores e erros de conversão binário-decimalfaeljscNessuna valutazione finora
- Secao 8 de Elon Lages II PDFDocumento3 pagineSecao 8 de Elon Lages II PDFJulianNessuna valutazione finora
- Apost 6 Sequencia e ProgressoesDocumento65 pagineApost 6 Sequencia e ProgressoesKlayton MathewsNessuna valutazione finora
- Sistemas lineares equaçõesDocumento30 pagineSistemas lineares equaçõesmenteNebulosaNessuna valutazione finora
- Ficha Trabalho - TangranDocumento1 paginaFicha Trabalho - TangranMaria Manuela Pragosa SilvaNessuna valutazione finora
- DERIVADA RN PDFDocumento74 pagineDERIVADA RN PDFAnthonny Gabryell LimaNessuna valutazione finora
- Cálculo Numérico Provas e Gabaritos - DCCUFRJDocumento35 pagineCálculo Numérico Provas e Gabaritos - DCCUFRJJuracy SantanaNessuna valutazione finora
- Notas Aula: Integral Cálculo Área CurvaDocumento12 pagineNotas Aula: Integral Cálculo Área Curvamarcosluiz022Nessuna valutazione finora
- Noções de TopologiaDocumento12 pagineNoções de TopologiaolafpalmerNessuna valutazione finora
- Corrigido 1Documento85 pagineCorrigido 1frankAnViTNessuna valutazione finora
- Geometria Analítica: Everton Coelho de MedeirosDocumento16 pagineGeometria Analítica: Everton Coelho de MedeirosEduardo SantosNessuna valutazione finora
- Modulo 8 - LimitesDocumento9 pagineModulo 8 - LimitesHenrique Araújo100% (1)
- Análise Funcional: Notas de AulaDocumento124 pagineAnálise Funcional: Notas de AulaCássio Dos AnjosNessuna valutazione finora
- Teorema Gauss AplicaçõesDocumento29 pagineTeorema Gauss AplicaçõesFamília Góes100% (1)
- ImersaoDocumento51 pagineImersaoThiago SantosNessuna valutazione finora
- Espaços Métricos e TopológicosDocumento10 pagineEspaços Métricos e TopológicosPaulo NascimentoNessuna valutazione finora
- Aula Resumão para P1Documento19 pagineAula Resumão para P1rajagi1077Nessuna valutazione finora
- Calculo Vetorial I - Curvas de NívelDocumento23 pagineCalculo Vetorial I - Curvas de NívelAlan RobsonNessuna valutazione finora
- Aula 07 02-02 Introdução MDC e MMCDocumento4 pagineAula 07 02-02 Introdução MDC e MMCAna Beatriz SilvaNessuna valutazione finora
- Aplicação Pesquisa Operacional-Produção Da CachaçaDocumento7 pagineAplicação Pesquisa Operacional-Produção Da CachaçaArnaldo AraújoNessuna valutazione finora
- Apresentação Sistemas de Informações Cap 1-Administração Da Empresa DigitalDocumento46 pagineApresentação Sistemas de Informações Cap 1-Administração Da Empresa DigitalArnaldo AraújoNessuna valutazione finora
- Apresentação Sistemas de Informações - Cap 8 Telecomunicações e RedesDocumento39 pagineApresentação Sistemas de Informações - Cap 8 Telecomunicações e RedesArnaldo AraújoNessuna valutazione finora
- Lista Formulas de RecorrênciaDocumento1 paginaLista Formulas de RecorrênciaArnaldo AraújoNessuna valutazione finora
- Redes 2 - Redes de Sensores-Gerenciamento de RedesDocumento18 pagineRedes 2 - Redes de Sensores-Gerenciamento de RedesArnaldo Araújo100% (1)
- Paper 03Documento2 paginePaper 03edjtcNessuna valutazione finora
- Intel. Artificial - Agente Resolução de ProblemasDocumento31 pagineIntel. Artificial - Agente Resolução de ProblemasArnaldo AraújoNessuna valutazione finora
- Modelo Baseado em Lógica Fuzzy para o Diagnóstico de Doenças - EnfermagemDocumento5 pagineModelo Baseado em Lógica Fuzzy para o Diagnóstico de Doenças - EnfermagemArnaldo Araújo100% (1)
- MOAQ - Multiple Objective Ant-QDocumento87 pagineMOAQ - Multiple Objective Ant-QArnaldo AraújoNessuna valutazione finora
- Tutorial Cadeias de MarkovDocumento8 pagineTutorial Cadeias de MarkovArnaldo AraújoNessuna valutazione finora
- Programação Linear InteiraDocumento62 pagineProgramação Linear InteiraArnaldo Araújo100% (4)
- Aplicação Multi-Nível Baseada Na Caracterização de Tráfego em Uma Rede Sem Fio em Larga EscalaDocumento15 pagineAplicação Multi-Nível Baseada Na Caracterização de Tráfego em Uma Rede Sem Fio em Larga EscalaArnaldo AraújoNessuna valutazione finora
- Aula Cinematica de RotaçãoDocumento12 pagineAula Cinematica de RotaçãoArnaldo Araújo100% (1)
- Programação Linear - Manual LINDODocumento9 pagineProgramação Linear - Manual LINDOArnaldo Araújo100% (2)
- Analise de Sensibilidade LINDODocumento5 pagineAnalise de Sensibilidade LINDOArnaldo Araújo100% (1)
- Lista de Exercicios de Pesquisa Operacional Com RespostasDocumento14 pagineLista de Exercicios de Pesquisa Operacional Com RespostasArnaldo Araújo87% (119)
- Sistemas Lineares - Métodos IterativosDocumento33 pagineSistemas Lineares - Métodos IterativosArnaldo AraújoNessuna valutazione finora
- Método CholeskyDocumento5 pagineMétodo CholeskyArnaldo AraújoNessuna valutazione finora
- Estrutura de Dados II - Arvores B - (BTREE)Documento4 pagineEstrutura de Dados II - Arvores B - (BTREE)Arnaldo AraújoNessuna valutazione finora
- Tutorial Cadeias de MarkovDocumento8 pagineTutorial Cadeias de MarkovArnaldo AraújoNessuna valutazione finora
- NP-Completude de AlgoritmosDocumento23 pagineNP-Completude de AlgoritmosArnaldo Araújo100% (1)
- Relatório Técnico TinyosDocumento19 pagineRelatório Técnico TinyosArnaldo AraújoNessuna valutazione finora
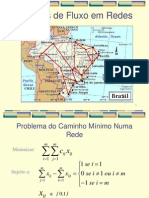
- Aplicação PO-Fluxo em RedesDocumento26 pagineAplicação PO-Fluxo em RedesArnaldo AraújoNessuna valutazione finora
- OracleDocumento50 pagineOracleedjtcNessuna valutazione finora
- Metodo de Otimizacão SimplexDocumento12 pagineMetodo de Otimizacão SimplexVinicius SilvaNessuna valutazione finora
- Guia LMPT LinuxDocumento24 pagineGuia LMPT LinuxEduardo Berbet de AlcantaraNessuna valutazione finora
- Estrutura de Dados - Tabelas de DispersãoDocumento15 pagineEstrutura de Dados - Tabelas de DispersãoArnaldo AraújoNessuna valutazione finora
- Estimação de Intervalos de ConfiançaDocumento21 pagineEstimação de Intervalos de ConfiançaArnaldo AraújoNessuna valutazione finora
- Tutorial Gerenciamento de Memória em JavaDocumento96 pagineTutorial Gerenciamento de Memória em JavaArnaldo AraújoNessuna valutazione finora
- Embarcados SeDocumento7 pagineEmbarcados SeHebert EstevesNessuna valutazione finora
- Resumo Cap 04 MRPDocumento16 pagineResumo Cap 04 MRPFelipe SartorNessuna valutazione finora
- Transmissão de programas DNC com FANUCDocumento9 pagineTransmissão de programas DNC com FANUCedersonNessuna valutazione finora
- 002 Relatorios Fcir002 e Fcir003002Documento4 pagine002 Relatorios Fcir002 e Fcir003002Thiago OliveiraNessuna valutazione finora
- Curso Técnico em Hospedagem - INFORMATICA APLICADA PDFDocumento76 pagineCurso Técnico em Hospedagem - INFORMATICA APLICADA PDFLuzia Vera100% (1)
- AVA para Licenciatura em MatemáticaDocumento14 pagineAVA para Licenciatura em MatemáticaZacarias ussufoNessuna valutazione finora
- Faculdade Cruzeiro Do Sul VirtualDocumento12 pagineFaculdade Cruzeiro Do Sul VirtualElias JuniorNessuna valutazione finora
- Altera idioma Windows 10 SingleDocumento4 pagineAltera idioma Windows 10 SingleYeison InfanteNessuna valutazione finora
- Banrisul SefazRS TUTORIAL Instalacao Cadeia de Certificacao Cartao BanrisulDocumento12 pagineBanrisul SefazRS TUTORIAL Instalacao Cadeia de Certificacao Cartao BanrisulAlexandredeAguiarNessuna valutazione finora
- Pensando em Java, 3 Ed. Revisão 4.0 - 1 - Introdução A ObjetosDocumento53 paginePensando em Java, 3 Ed. Revisão 4.0 - 1 - Introdução A ObjetosJessicajolieNessuna valutazione finora
- AOL3-Gerência de Configuração FizDocumento8 pagineAOL3-Gerência de Configuração FizFelipe dos Santos de MenezesNessuna valutazione finora
- Implementação de Métricas para Estimativa de Tempo de Manutenção em Sistemas Orientados Por ObjetosDocumento43 pagineImplementação de Métricas para Estimativa de Tempo de Manutenção em Sistemas Orientados Por ObjetosLuiz Felipe Mendes100% (1)
- Tutorial - Photoshop CS6-CC - Colorir Imagem Preto e Branco Utilizando As CurvasDocumento4 pagineTutorial - Photoshop CS6-CC - Colorir Imagem Preto e Branco Utilizando As Curvas248341Nessuna valutazione finora
- POINT Guard I/O Safety Modules: Installation InstructionsDocumento4 paginePOINT Guard I/O Safety Modules: Installation InstructionsGAB SPACE DNessuna valutazione finora
- MOC7 - Anexo I - LeiauteNFeDocumento88 pagineMOC7 - Anexo I - LeiauteNFeClaudemir Goes LuizNessuna valutazione finora
- Apostila - PSIMDocumento25 pagineApostila - PSIMbruno_bit100% (2)
- Manual Sepiades PTBRDocumento65 pagineManual Sepiades PTBRFlávia PozzebonNessuna valutazione finora
- Base de Dados para Confecção de MapasDocumento4 pagineBase de Dados para Confecção de MapasIvan AlmeidaNessuna valutazione finora
- EapDocumento5 pagineEapIuri Felipe Manica ColussiNessuna valutazione finora
- Cobol AvançadoDocumento106 pagineCobol Avançadonilsonbsb1Nessuna valutazione finora
- Full Stack Ebook APIsDocumento16 pagineFull Stack Ebook APIsFernanda BritoNessuna valutazione finora
- Normalização de dados em bancos de dados relacionaisDocumento17 pagineNormalização de dados em bancos de dados relacionaisVinicius FelicianoNessuna valutazione finora
- Manual Tablet GenesisDocumento11 pagineManual Tablet GenesisA.R. de AndradeNessuna valutazione finora
- Atividade 02Documento3 pagineAtividade 02kamila SilvaNessuna valutazione finora
- Volk WagenDocumento262 pagineVolk WagenMEHA6502100% (15)
- Digiplex EVO96 BRDocumento45 pagineDigiplex EVO96 BRLuis Renato SecoNessuna valutazione finora
- Tpa-fx5-Mb - Apostila Treinamento Iq-F ModbusDocumento30 pagineTpa-fx5-Mb - Apostila Treinamento Iq-F ModbusfreitaswalterNessuna valutazione finora
- Como Jogar Ps2 Pelo UsbDocumento6 pagineComo Jogar Ps2 Pelo Usblorena_lourena100% (1)
- Cartilha de Caracterização de Áudio - Texas InstrumentsDocumento13 pagineCartilha de Caracterização de Áudio - Texas InstrumentsMarcos AurelioNessuna valutazione finora
- Audiência Consumidor Procon-MA Smart TV Golpe MLDocumento9 pagineAudiência Consumidor Procon-MA Smart TV Golpe MLDanielNessuna valutazione finora