Potrebbero piacerti anche
- Napoleao Das DR Guara PDFDocumento157 pagineNapoleao Das DR Guara PDFDaniela FNessuna valutazione finora
- Conector de CisalhamentoDocumento217 pagineConector de CisalhamentoGregorio Vieira100% (1)
- PXJ 14 PDFDocumento62 paginePXJ 14 PDFFernanda SchlickmannNessuna valutazione finora
- Aula Compressibilidade e AdensamentoDocumento35 pagineAula Compressibilidade e AdensamentoMarcio Antonio dos SantosNessuna valutazione finora
- Relatorio Expansibilidade de Le ChatelierDocumento5 pagineRelatorio Expansibilidade de Le ChatelierRomulo FariaNessuna valutazione finora
- Aula 7 - Termoquimica PDFDocumento4 pagineAula 7 - Termoquimica PDFLara Tostes Gouveia FaturetoNessuna valutazione finora
- Fancoil TFC CorrigidoDocumento11 pagineFancoil TFC CorrigidoRemo CarvalhoNessuna valutazione finora
- Exercícios Sobre Notações CientíficaDocumento3 pagineExercícios Sobre Notações CientíficaRodrigo SilvaNessuna valutazione finora
- Respostas Da Parcial Do 1ºbimestreDocumento4 pagineRespostas Da Parcial Do 1ºbimestremarcio vianaNessuna valutazione finora
- Aula06 Transistor Como Chave COM NOTA AULADocumento22 pagineAula06 Transistor Como Chave COM NOTA AULAIBRNessuna valutazione finora
- Teste 1 8ºADocumento5 pagineTeste 1 8ºAanitadiogoNessuna valutazione finora
- Lista Capítulo 11Documento5 pagineLista Capítulo 11JORGE ADAIR DE MELO JUNIORNessuna valutazione finora
- Lei de SnellDocumento6 pagineLei de SnellFabiola Almeida BezerraNessuna valutazione finora
- Problemas de EletricidadeDocumento8 pagineProblemas de EletricidadeScribdTranslationsNessuna valutazione finora
- 16-Apostila de Tomografia - Prof. Victor Netto-2Documento78 pagine16-Apostila de Tomografia - Prof. Victor Netto-2Isabel Aparecida GardianoNessuna valutazione finora
- Aula Calculo de Banco 27-11Documento36 pagineAula Calculo de Banco 27-11sandroalvez13Nessuna valutazione finora
- Abnt NBR Iso 17665-20013Documento60 pagineAbnt NBR Iso 17665-20013alanferndnesNessuna valutazione finora
- NBR15220 2Documento40 pagineNBR15220 2edimonteiroNessuna valutazione finora
- ROBOTICA 03 A Atuadores PDFDocumento49 pagineROBOTICA 03 A Atuadores PDFHelder Anibal HerminiNessuna valutazione finora
- Lista de Exercícios Propostos de Propagação de Ondas e AntenasDocumento12 pagineLista de Exercícios Propostos de Propagação de Ondas e AntenasELEANDRO MARQUESNessuna valutazione finora
- Aap2 - Cálculo Diferencial e Integral IIIDocumento3 pagineAap2 - Cálculo Diferencial e Integral IIIEnderson PedrozaNessuna valutazione finora
- AVALIAÇÃO - Cinetica - 2º AnoDocumento3 pagineAVALIAÇÃO - Cinetica - 2º AnoLaiane AmericoNessuna valutazione finora
- 8º Ano Pet 6 Semana 3Documento10 pagine8º Ano Pet 6 Semana 3ElFoxy 13Nessuna valutazione finora
- Tabela AnsiDocumento6 pagineTabela AnsiGilberto FigueiredoNessuna valutazione finora
- Pressão Disponível, Pressão Estática e Pressão DinâmicaDocumento4 paginePressão Disponível, Pressão Estática e Pressão DinâmicaMarcus Miranda MagalhãesNessuna valutazione finora
- À Escuta Dos Planetas - Jacques BergierDocumento173 pagineÀ Escuta Dos Planetas - Jacques BergierLuan CerberusNessuna valutazione finora
- VMCU Códigos de Falha de Diagnóstico Volvo FH4Documento14 pagineVMCU Códigos de Falha de Diagnóstico Volvo FH4wesley batista100% (3)
- Asvotec 2017 Inauguracao FlareDocumento53 pagineAsvotec 2017 Inauguracao FlarejpvissottoNessuna valutazione finora
- CCK 4400 MeDocumento7 pagineCCK 4400 MejclessioNessuna valutazione finora
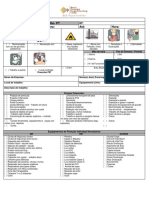
- PT Permissao de TrabalhoDocumento2 paginePT Permissao de TrabalhoDiego RodriguesNessuna valutazione finora