Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Arthur Eddington's Two Tables ParadoxDocumento2 pagineArthur Eddington's Two Tables ParadoxTimothy ChambersNessuna valutazione finora
- Power Semiconductor Applications - Philips-NXPDocumento609 paginePower Semiconductor Applications - Philips-NXPnanditonanaman100% (2)
- GWRS5500Documento13 pagineGWRS5500Andrew HartNessuna valutazione finora
- RF-9801 Lamination Adhesive For Soft PackageDocumento4 pagineRF-9801 Lamination Adhesive For Soft PackageWasif AzimNessuna valutazione finora
- Technical Dat A SheetDocumento2 pagineTechnical Dat A SheetWasif Azim100% (2)
- MyFLEX SFG 501A - SFG 510B (ENG Ver.3 September 2020)Documento1 paginaMyFLEX SFG 501A - SFG 510B (ENG Ver.3 September 2020)Wasif AzimNessuna valutazione finora
- MB 870+ Hardener CT 90Documento2 pagineMB 870+ Hardener CT 90Wasif AzimNessuna valutazione finora
- Stock Transfer Request: Copy Kompass Pakistan Pvt. LTDDocumento1 paginaStock Transfer Request: Copy Kompass Pakistan Pvt. LTDWasif AzimNessuna valutazione finora
- Technical Data SheetDocumento2 pagineTechnical Data SheetWasif AzimNessuna valutazione finora
- Technical Information Liquid Inks: Matt Over Print VarnishDocumento2 pagineTechnical Information Liquid Inks: Matt Over Print VarnishWasif AzimNessuna valutazione finora
- 1000w Induction Heater ProposalDocumento6 pagine1000w Induction Heater ProposalAmmar KhalidNessuna valutazione finora
- Errors Resulting From Channel Filters and Adjacent Channel Crosstalk in DSB/SC Telemetry SystemsDocumento13 pagineErrors Resulting From Channel Filters and Adjacent Channel Crosstalk in DSB/SC Telemetry SystemsWasif AzimNessuna valutazione finora
- Question PaperDocumento8 pagineQuestion PaperWasif AzimNessuna valutazione finora
- Induction Heating PaperDocumento8 pagineInduction Heating PaperSyed Salman AliNessuna valutazione finora
- Packaging Film Impact On Food Organoleptic Properties - An ExperimDocumento10 paginePackaging Film Impact On Food Organoleptic Properties - An ExperimWasif AzimNessuna valutazione finora
- ADCOTE 548-81R + Coreactant F (TDS)Documento4 pagineADCOTE 548-81R + Coreactant F (TDS)Wasif AzimNessuna valutazione finora
- A Bidirectional, Sinusoidal, High-Frequency InverterDocumento8 pagineA Bidirectional, Sinusoidal, High-Frequency InverterWasif AzimNessuna valutazione finora
- Inverter Design Using High Frequency Ijariie3815Documento5 pagineInverter Design Using High Frequency Ijariie3815Chim RuồiNessuna valutazione finora
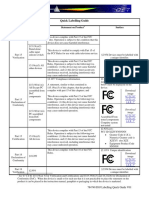
- Quick Labelling Guide: Equipment Authorization Rule Part Device Type Statement On Product SurfaceDocumento1 paginaQuick Labelling Guide: Equipment Authorization Rule Part Device Type Statement On Product SurfaceWasif AzimNessuna valutazione finora
- Induction Coils: How To Turn Them Into Powerful Business ToolsDocumento8 pagineInduction Coils: How To Turn Them Into Powerful Business ToolsWasif AzimNessuna valutazione finora
- A Third Method of Generation and Detection of Single-Sideband SignalsDocumento5 pagineA Third Method of Generation and Detection of Single-Sideband SignalsWasif AzimNessuna valutazione finora
- Us4355222 PDFDocumento8 pagineUs4355222 PDFWasif AzimNessuna valutazione finora
- A Bidirectional, Sinusoidal, High-Frequency InverterDocumento8 pagineA Bidirectional, Sinusoidal, High-Frequency InverterWasif AzimNessuna valutazione finora
- Practical Statistical Signal Processing Using MATLABDocumento31 paginePractical Statistical Signal Processing Using MATLABalexverde3Nessuna valutazione finora
- Design of Igbt Based LLC Resonant InverterDocumento7 pagineDesign of Igbt Based LLC Resonant InverterdhruvNessuna valutazione finora
- A High-Frequency Resonant Inverter Topology With Low Voltage StressDocumento14 pagineA High-Frequency Resonant Inverter Topology With Low Voltage StressWasif AzimNessuna valutazione finora
- THE USE OF CHARGE-COUPlED D - VICES FOR SINGLE-SIDEBAND MODULATION 1974Documento8 pagineTHE USE OF CHARGE-COUPlED D - VICES FOR SINGLE-SIDEBAND MODULATION 1974Wasif AzimNessuna valutazione finora
- Us3229232 Vestigal Sdeband Moulaton System 1962Documento4 pagineUs3229232 Vestigal Sdeband Moulaton System 1962Wasif AzimNessuna valutazione finora
- A Compatible Double Sideband/Single Sideband/Constant Bandwidth FM Telemetry System For Wideband DataDocumento11 pagineA Compatible Double Sideband/Single Sideband/Constant Bandwidth FM Telemetry System For Wideband DataWasif AzimNessuna valutazione finora
- Double Sideband Suppressed Carrier Telemetry SystemDocumento15 pagineDouble Sideband Suppressed Carrier Telemetry SystemWasif AzimNessuna valutazione finora
- The Fading Machine, and Its Use For The Investigation of The Effects of Frequency-Selective Fading 1947Documento15 pagineThe Fading Machine, and Its Use For The Investigation of The Effects of Frequency-Selective Fading 1947Wasif AzimNessuna valutazione finora
- A Method of Self-Recovering Equalization For Multilevel AM 1975Documento4 pagineA Method of Self-Recovering Equalization For Multilevel AM 1975Wasif AzimNessuna valutazione finora
- Us3849730 Carrier Recovery in Vestigial Sideband 1973Documento6 pagineUs3849730 Carrier Recovery in Vestigial Sideband 1973Wasif AzimNessuna valutazione finora
- Catalog Produk Arduino Rajacell Ver10.4 - End - UserDocumento192 pagineCatalog Produk Arduino Rajacell Ver10.4 - End - UserSanto SetiawanNessuna valutazione finora
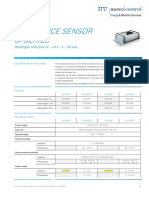
- DB Irradiance Sensor Si-Series en 20171016Documento3 pagineDB Irradiance Sensor Si-Series en 20171016Solar ProjectsNessuna valutazione finora
- Using H2 As A Gas Turbine FuelDocumento8 pagineUsing H2 As A Gas Turbine FuelFutureGreenScienceNessuna valutazione finora
- Handout E.15 - Examples On Transient Response of First and Second Order Systems, System Damping and Natural FrequencyDocumento14 pagineHandout E.15 - Examples On Transient Response of First and Second Order Systems, System Damping and Natural FrequencyRishikesh BhavsarNessuna valutazione finora
- 15CV553 PDFDocumento2 pagine15CV553 PDFDeepak OraonNessuna valutazione finora
- SP485Documento10 pagineSP485DmitriyNessuna valutazione finora
- ESM Upgrade To 72 PDFDocumento46 pagineESM Upgrade To 72 PDFsantoshs2002848Nessuna valutazione finora
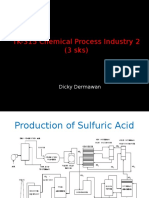
- TK-315 CPI2 - 1 - NonReacting SystemsDocumento34 pagineTK-315 CPI2 - 1 - NonReacting SystemsMuhammad IkbalNessuna valutazione finora
- Human Face Recognition Attendance SystemDocumento17 pagineHuman Face Recognition Attendance SystemAnish ArunaNessuna valutazione finora
- DDR3 and LPDDR3 Measurement and Analysis: 6 Series MSO Opt. 6-CMDDR3 and Opt. 6-DBDDR3 Application DatasheetDocumento14 pagineDDR3 and LPDDR3 Measurement and Analysis: 6 Series MSO Opt. 6-CMDDR3 and Opt. 6-DBDDR3 Application DatasheetNaveenNessuna valutazione finora
- HMT16 MarksDocumento12 pagineHMT16 MarkstagoreboopathyNessuna valutazione finora
- Decoupling The UNIVAC Computer From Superblocks in Hierarchical DatabasesDocumento6 pagineDecoupling The UNIVAC Computer From Superblocks in Hierarchical DatabasescatarogerNessuna valutazione finora
- Dot 57406 DS1Documento172 pagineDot 57406 DS1Carlos FernandezNessuna valutazione finora
- Desai, Park - 2005 - Recent Developments in Microencapsulation of Food Ingredients PDFDocumento36 pagineDesai, Park - 2005 - Recent Developments in Microencapsulation of Food Ingredients PDFIoanaCarlanNessuna valutazione finora
- CNS TechnicianDocumento2 pagineCNS TechnicianSohailNessuna valutazione finora
- Assignment 5 With Answer KeyDocumento2 pagineAssignment 5 With Answer KeyAbhishek MohiteNessuna valutazione finora
- Elemental Analysis of Crude OilsDocumento8 pagineElemental Analysis of Crude OilsMirzan Alexandra Torres LaraNessuna valutazione finora
- CPE211 Data Structures and Algorithms: Class OrientationDocumento9 pagineCPE211 Data Structures and Algorithms: Class OrientationHaremaibNessuna valutazione finora
- 141A Service PDFDocumento101 pagine141A Service PDFAndrás SzabóNessuna valutazione finora
- Bone Specific Alkaline PhophataseDocumento6 pagineBone Specific Alkaline PhophataseMohan DesaiNessuna valutazione finora
- B 1815Documento4 pagineB 1815Angelo MachadoNessuna valutazione finora
- SCC-C ManualDocumento28 pagineSCC-C ManualGian Paul Ramos AcostaNessuna valutazione finora
- Cutting - in - Practice - Blades IndicationsDocumento24 pagineCutting - in - Practice - Blades IndicationsHector Elias Mercedes HazimNessuna valutazione finora
- Silver Nanoparticles DataDocumento6 pagineSilver Nanoparticles DataSanwithz SittiNessuna valutazione finora
- Unbound Base Courses and Ballasts Rev 0Documento19 pagineUnbound Base Courses and Ballasts Rev 0MohamedOmar83Nessuna valutazione finora
- Fisher 9500 Butterfly Control ValveDocumento12 pagineFisher 9500 Butterfly Control ValveOscarNessuna valutazione finora
- Miscellaneous Measurements: and ControlsDocumento50 pagineMiscellaneous Measurements: and ControlsJeje JungNessuna valutazione finora