Potrebbero piacerti anche
- Alvarado Full Height Single Turnstile ManualDocumento44 pagineAlvarado Full Height Single Turnstile ManualALVER CARDENASNessuna valutazione finora
- Design and Analysis of Robot Manipulators by Integrated Cae Procedures 1 Brat Rotatie 12 PaginiDocumento30 pagineDesign and Analysis of Robot Manipulators by Integrated Cae Procedures 1 Brat Rotatie 12 PaginiCristi AlexNessuna valutazione finora
- Finite Element Based Analysis of Rotating Robot PedestalDocumento5 pagineFinite Element Based Analysis of Rotating Robot PedestalAnonymous kw8Yrp0R5rNessuna valutazione finora
- Tool Path Planning For Manufacturing of Asymmetric Parts by Incremental Sheet Metal Forming by Means of Robotic ManipulatorDocumento11 pagineTool Path Planning For Manufacturing of Asymmetric Parts by Incremental Sheet Metal Forming by Means of Robotic Manipulatormohamad ma'rufNessuna valutazione finora
- Modeling in ADAMS of A 6R Industrial RobotDocumento5 pagineModeling in ADAMS of A 6R Industrial RobotvxefjrqlanqxfimargNessuna valutazione finora
- Kinematic Analysis of The Abb Irb 1520 Industrial Robot Using Roboanalyzer SoftwareDocumento10 pagineKinematic Analysis of The Abb Irb 1520 Industrial Robot Using Roboanalyzer SoftwareAbenezer bediluNessuna valutazione finora
- Spray Painting Robot With Low Cost AutomDocumento9 pagineSpray Painting Robot With Low Cost AutomMuhammad SulemanNessuna valutazione finora
- Ansys Turbo Machinery FlyerDocumento2 pagineAnsys Turbo Machinery FlyermilanstrNessuna valutazione finora
- Fabricating A Completely Assemblable Robotic ArmDocumento19 pagineFabricating A Completely Assemblable Robotic ArmshanthiniNessuna valutazione finora
- Lightweight GantryDocumento16 pagineLightweight GantryabhayuietNessuna valutazione finora
- Kinematic Analysis of 6 DOF Articulated Robotic ArDocumento5 pagineKinematic Analysis of 6 DOF Articulated Robotic ArRoman MorozovNessuna valutazione finora
- Sciencedirect: Using Machine Vision For Flexible Automatic Assembly SystemDocumento8 pagineSciencedirect: Using Machine Vision For Flexible Automatic Assembly Systemsachin dissanayakeNessuna valutazione finora
- Kinematic Tool-Path Smoothing For 6-Axis Industrial Machining RobotsDocumento10 pagineKinematic Tool-Path Smoothing For 6-Axis Industrial Machining RobotsToniolo LucaNessuna valutazione finora
- Manufacturing Using Robot: Advanced Materials Research March 2012Documento6 pagineManufacturing Using Robot: Advanced Materials Research March 2012Priyanka ChavanNessuna valutazione finora
- Automatic Work Piece Inspection Cum Counter ConveyorDocumento10 pagineAutomatic Work Piece Inspection Cum Counter ConveyorIJRASETPublicationsNessuna valutazione finora
- Automated Modeling of Screw Conveyor Components in CATIA: Yogesh H. Sawant, U. M. NimbalkarDocumento5 pagineAutomated Modeling of Screw Conveyor Components in CATIA: Yogesh H. Sawant, U. M. NimbalkarerpublicationNessuna valutazione finora
- Design, Optimization, and Analysis of Machining Fixture Layout Under Dynamic ConditionsDocumento19 pagineDesign, Optimization, and Analysis of Machining Fixture Layout Under Dynamic ConditionsIJRASETPublicationsNessuna valutazione finora
- Analysis of The Vertical Moving Table Type Broaching MachineDocumento11 pagineAnalysis of The Vertical Moving Table Type Broaching MachineRijalul KhoiriNessuna valutazione finora
- Modal Analysis of Machine Tool Column Using Finite Element MethodDocumento10 pagineModal Analysis of Machine Tool Column Using Finite Element Methodgowrisankar.s2020Nessuna valutazione finora
- First PhaseDocumento14 pagineFirst PhaseSurendra PalNessuna valutazione finora
- Hou 2019Documento7 pagineHou 2019enterlogNessuna valutazione finora
- Feature Based Modeling and Automated Process Plan Generation For Turning ComponentsDocumento10 pagineFeature Based Modeling and Automated Process Plan Generation For Turning Components17102117 vrushaliNessuna valutazione finora
- Vibration 05 00034 v3Documento18 pagineVibration 05 00034 v3saimk shakeelNessuna valutazione finora
- Modeling and Analysis of Support Pin For Brake Spider Fixture by Fem Using Ansys SoftwareDocumento6 pagineModeling and Analysis of Support Pin For Brake Spider Fixture by Fem Using Ansys SoftwareRupali PatilNessuna valutazione finora
- Optimization of The Setup Position of A Workpiece For Five-Axis Machining To Reduce Machining TimeDocumento13 pagineOptimization of The Setup Position of A Workpiece For Five-Axis Machining To Reduce Machining TimeHungTranNessuna valutazione finora
- Optimization of The Setup Position of A Workpiece For Five-Axis Machining To Reduce Machining TimeDocumento13 pagineOptimization of The Setup Position of A Workpiece For Five-Axis Machining To Reduce Machining TimeHungTranNessuna valutazione finora
- A Robotic Automatic Assembly System Based On VisioDocumento19 pagineA Robotic Automatic Assembly System Based On VisioXavier Eduardo100% (1)
- Liu2018 Article AnEfficientStructuralOptimizatDocumento15 pagineLiu2018 Article AnEfficientStructuralOptimizatSairam PeddiNessuna valutazione finora
- Machine Parts Recognition and Defect Detection in Automated Assembly Systems Using Computer Vision TechniquesDocumento10 pagineMachine Parts Recognition and Defect Detection in Automated Assembly Systems Using Computer Vision TechniquesPlacement UCEVNessuna valutazione finora
- Career Episode 2 Robotic Arm Design and AnalysisDocumento5 pagineCareer Episode 2 Robotic Arm Design and AnalysisNishar Alam Khan 19MCD0042Nessuna valutazione finora
- Synosis Print ReportDocumento6 pagineSynosis Print ReportNIKHIL ASNessuna valutazione finora
- Static Structural Analysis of 4 Dof Telescopic Robotic ManipulatorDocumento6 pagineStatic Structural Analysis of 4 Dof Telescopic Robotic Manipulatoralagar krishna kumarNessuna valutazione finora
- Configuration Design and Accuracy Analysis of Special Grinding Machine For Thin-Walled Small Concave SurfacesDocumento10 pagineConfiguration Design and Accuracy Analysis of Special Grinding Machine For Thin-Walled Small Concave SurfacesTommy GaoNessuna valutazione finora
- A Flexible Fixture Design Method Research For Similar Automotive Body Parts of Different AutomobilesDocumento8 pagineA Flexible Fixture Design Method Research For Similar Automotive Body Parts of Different Automobilesi50229Nessuna valutazione finora
- A Digital and Structure-Adaptive Geometric Error Definition and Modeling Method of Reconfigurable Machine ToolDocumento13 pagineA Digital and Structure-Adaptive Geometric Error Definition and Modeling Method of Reconfigurable Machine ToolTommy GaoNessuna valutazione finora
- Two Link Planar Robot Manipulator Mechanism Analysis With MATLABDocumento12 pagineTwo Link Planar Robot Manipulator Mechanism Analysis With MATLABDk KNessuna valutazione finora
- Jain 2019 IOP Conf. Ser. Mater. Sci. Eng. 691 012010Documento9 pagineJain 2019 IOP Conf. Ser. Mater. Sci. Eng. 691 012010Samuel AbraghamNessuna valutazione finora
- 1 s2.0 S1877050918310548 MainDocumento8 pagine1 s2.0 S1877050918310548 MainAnonymous 9q5GEfm8INessuna valutazione finora
- Vitual PistonDocumento31 pagineVitual PistonrenatoeliegeNessuna valutazione finora
- Overview On The Object Rejection and Counting Machine: July 2017Documento4 pagineOverview On The Object Rejection and Counting Machine: July 2017dhanshri kolekarNessuna valutazione finora
- Technical Department: The Institution of Engineers (India) R&D Grant-In-Aid SchemeDocumento9 pagineTechnical Department: The Institution of Engineers (India) R&D Grant-In-Aid SchemeSai Ram Prasad ReddyNessuna valutazione finora
- Robotic ArmDocumento6 pagineRobotic Armad1ad1ad1Nessuna valutazione finora
- Design, Simulation, and Analysis of A 6-Axis Robot Using Robot Visualization SoftwareDocumento11 pagineDesign, Simulation, and Analysis of A 6-Axis Robot Using Robot Visualization SoftwareChristy PollyNessuna valutazione finora
- Design of Spot WeldDocumento15 pagineDesign of Spot Weldkaustubh girgasNessuna valutazione finora
- Design and Performance Analysis of Pneumatic 3 Axes Robotic Arm For Mechanical ComponentsDocumento6 pagineDesign and Performance Analysis of Pneumatic 3 Axes Robotic Arm For Mechanical ComponentsurveshNessuna valutazione finora
- Rbtic ArmDocumento18 pagineRbtic ArmmnervadesuNessuna valutazione finora
- A Review On Design and Development of Pick and Place Robotic ArmDocumento5 pagineA Review On Design and Development of Pick and Place Robotic ArmAschalew DenekeNessuna valutazione finora
- An Online Real-Time Path Compensation System For Industrial Robots Based On Laser TrackerDocumento14 pagineAn Online Real-Time Path Compensation System For Industrial Robots Based On Laser TrackerMihail AvramovNessuna valutazione finora
- Robotic ArmDocumento9 pagineRobotic ArmRohit KumarNessuna valutazione finora
- Literature Reviewon Designand Simulationof Industrial Robotic Armusing CADCAMSoftwareDocumento4 pagineLiterature Reviewon Designand Simulationof Industrial Robotic Armusing CADCAMSoftwareSamuel AbraghamNessuna valutazione finora
- Reverse Engineering in Fabrication of Piston Crown: SGGSDGDocumento11 pagineReverse Engineering in Fabrication of Piston Crown: SGGSDGAlois Junior Hernandez SanchezNessuna valutazione finora
- Robotic Assembly of Threaded Fasteners in A Non-Structured EnvironmentDocumento15 pagineRobotic Assembly of Threaded Fasteners in A Non-Structured EnvironmentPolco-SwapnilNessuna valutazione finora
- A New Approach For Dynamic Analysis and Driving Control of CNC Machine ToolDocumento8 pagineA New Approach For Dynamic Analysis and Driving Control of CNC Machine ToolRuyeri Alex Narro ReynaNessuna valutazione finora
- Die-Casting Process Is Capable of Producing Simple As Well As Complex ShapedDocumento6 pagineDie-Casting Process Is Capable of Producing Simple As Well As Complex ShapedEr GuptaNessuna valutazione finora
- Fixture Design System With Automatic Generation and Modification of Complementary Elements For Modular FixturesDocumento21 pagineFixture Design System With Automatic Generation and Modification of Complementary Elements For Modular FixturessamNessuna valutazione finora
- Freeform Surface Measurement and Characterisation Using A Toolmakers MicroscopeDocumento8 pagineFreeform Surface Measurement and Characterisation Using A Toolmakers MicroscopeGgNessuna valutazione finora
- JETIRFA06001Documento5 pagineJETIRFA06001Trần ĐạtNessuna valutazione finora
- Sy Ie Robotics CimDocumento10 pagineSy Ie Robotics CimChow Jun XunNessuna valutazione finora
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaDa EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNessuna valutazione finora
- Machine Learning Applications in Civil EngineeringDa EverandMachine Learning Applications in Civil EngineeringNessuna valutazione finora
- Overview of Solar DesalinationDocumento17 pagineOverview of Solar Desalinationalagar krishna kumarNessuna valutazione finora
- Desalination by Using Alternative EnergyDocumento20 pagineDesalination by Using Alternative Energyalagar krishna kumarNessuna valutazione finora
- Mechatronics: Pushparaj Mani PathakDocumento36 pagineMechatronics: Pushparaj Mani Pathakalagar krishna kumarNessuna valutazione finora
- s17 PDFDocumento5 pagines17 PDFalagar krishna kumarNessuna valutazione finora
- Sciencedirect Sciencedirect SciencedirectDocumento4 pagineSciencedirect Sciencedirect Sciencedirectalagar krishna kumarNessuna valutazione finora
- Intro Robot Kinematics 5Documento25 pagineIntro Robot Kinematics 5Gnanesh PendliNessuna valutazione finora
- Static Analysis of A 6 - Axis Industrial Robot Using Finite Element AnalysisDocumento7 pagineStatic Analysis of A 6 - Axis Industrial Robot Using Finite Element Analysisalagar krishna kumarNessuna valutazione finora
- Fluid Mechanics Is A Branch of Science Which Deals With Fluids inDocumento6 pagineFluid Mechanics Is A Branch of Science Which Deals With Fluids inalagar krishna kumarNessuna valutazione finora
- Unit 14 - Week 12: Assignment 12Documento5 pagineUnit 14 - Week 12: Assignment 12alagar krishna kumarNessuna valutazione finora
- Stress TypesDocumento1 paginaStress Typesalagar krishna kumarNessuna valutazione finora
- Writing Goals and Objectives GoalsDocumento2 pagineWriting Goals and Objectives Goalsalagar krishna kumarNessuna valutazione finora
- Agreement Gold LoanDocumento4 pagineAgreement Gold Loanalagar krishna kumarNessuna valutazione finora
- Understanding Volume Kinetics: Robert G. HahnDocumento9 pagineUnderstanding Volume Kinetics: Robert G. Hahnalagar krishna kumarNessuna valutazione finora
- EGD Diagrams1Documento3 pagineEGD Diagrams1alagar krishna kumarNessuna valutazione finora
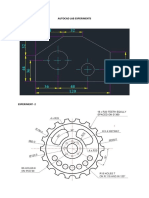
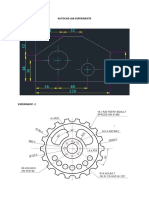
- Autocad Lab Experiments Experiment - 1Documento3 pagineAutocad Lab Experiments Experiment - 1alagar krishna kumarNessuna valutazione finora
- Life QuotesDocumento2 pagineLife Quotesalagar krishna kumarNessuna valutazione finora
- For Compressible Flow:: Displacement Thickness: It Is Denoted byDocumento1 paginaFor Compressible Flow:: Displacement Thickness: It Is Denoted byalagar krishna kumarNessuna valutazione finora
- F AdaptersDocumento122 pagineF Adaptersxuanphuong2710Nessuna valutazione finora
- Letourneau Offshore Products: Parts CatalogDocumento3 pagineLetourneau Offshore Products: Parts Catalogsyedainahmad100% (1)
- Compression Test MachineDocumento3 pagineCompression Test Machineahana expotech lab abeerNessuna valutazione finora
- Mechanical SealDocumento16 pagineMechanical SealRAJEDIA ABDULLAHNessuna valutazione finora
- Pressure Regulator Valve Kit: GM 6L45, 6L50, 6L80, 6L90Documento2 paginePressure Regulator Valve Kit: GM 6L45, 6L50, 6L80, 6L90Mohamed AhmedNessuna valutazione finora
- RH - Em9seDocumento6 pagineRH - Em9seJefa DanarNessuna valutazione finora
- Service Bulletin - Water - Pressure - Valve - AssemblyDocumento3 pagineService Bulletin - Water - Pressure - Valve - AssemblylicavitosNessuna valutazione finora
- Reddy 1984Documento8 pagineReddy 1984vishalgoreNessuna valutazione finora
- Saudi Aramco Test Report Pre-Pressure Test Checklist (Form) : SATR-A-2007 22-Jan-18 MechDocumento2 pagineSaudi Aramco Test Report Pre-Pressure Test Checklist (Form) : SATR-A-2007 22-Jan-18 MechaneeshNessuna valutazione finora
- Experiment 2 Data Enthalpy of Fusion For Water: T T T T T HFDocumento7 pagineExperiment 2 Data Enthalpy of Fusion For Water: T T T T T HFmeropeatlaNessuna valutazione finora
- Seri Omega Private & International School: To View The Video For This Worksheet, ClickDocumento18 pagineSeri Omega Private & International School: To View The Video For This Worksheet, ClickShean LimNessuna valutazione finora
- Ball Mill ManualDocumento7 pagineBall Mill ManualAnonymous EBReO8vNessuna valutazione finora
- Arcusaflex - REICH-AC - 2020-03 - en - REICH - 20200210Documento32 pagineArcusaflex - REICH-AC - 2020-03 - en - REICH - 20200210Rinadi Airlangga FernandezNessuna valutazione finora
- Simple MachinesDocumento105 pagineSimple Machinesniel justin lakerNessuna valutazione finora
- Kruger Tunnel Ventilation Products BrochureDocumento12 pagineKruger Tunnel Ventilation Products BrochureMarino AyalaNessuna valutazione finora
- Tensile TestingDocumento17 pagineTensile TestingNanak BatraNessuna valutazione finora
- 9 KZ Ze Xxwo EKAm 5 O7 VJ58Documento49 pagine9 KZ Ze Xxwo EKAm 5 O7 VJ58KrishnaNessuna valutazione finora
- Black Holes, Singularities and Information Loss - Richard P DolanDocumento5 pagineBlack Holes, Singularities and Information Loss - Richard P DolancolordiamondsNessuna valutazione finora
- Know MoreDocumento6 pagineKnow MoreramkumarNessuna valutazione finora
- Old Oil Barrel GeneratorDocumento15 pagineOld Oil Barrel GeneratorAlbert NewhearthNessuna valutazione finora
- 528N - Electrically Non-Conductive Hose: Performance Exceeds SAE 100 R8 / ISO 3949 Type R8 / DIN EN 855 Type R8Documento1 pagina528N - Electrically Non-Conductive Hose: Performance Exceeds SAE 100 R8 / ISO 3949 Type R8 / DIN EN 855 Type R8Jas SumNessuna valutazione finora
- MSG 00174Documento7 pagineMSG 00174Max PhunthepNessuna valutazione finora
- 18 Appendix C (E)Documento14 pagine18 Appendix C (E)Rammiris ManNessuna valutazione finora
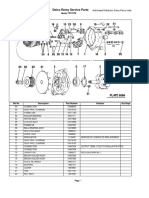
- Delco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaDocumento2 pagineDelco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaWilson AcostaNessuna valutazione finora
- Performance of Concrete Beams Reinforced With Basalt Fibre Composite RebarDocumento12 paginePerformance of Concrete Beams Reinforced With Basalt Fibre Composite RebarSARA ISABEL BURBANO MOSQUERANessuna valutazione finora
- Principles of Quantum Mechanics - DiracDocumento324 paginePrinciples of Quantum Mechanics - DiracLuigi RiveraNessuna valutazione finora
- TF6 ReportDocumento19 pagineTF6 ReportTing Kee Chuong100% (1)
- Design, Implementation and Speed Estimation of Three Phase 2 KW Out Runner Permanent Magnet BLDC MotorDocumento14 pagineDesign, Implementation and Speed Estimation of Three Phase 2 KW Out Runner Permanent Magnet BLDC MotorDavid AzadNessuna valutazione finora
- Fundamentals of Beam Bracing Yura: Related PapersDocumento17 pagineFundamentals of Beam Bracing Yura: Related PapersM MushtaqNessuna valutazione finora