Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Numerical Methods Formula SheetDocumento8 pagineNumerical Methods Formula SheetMuhammad Asyraaf Anuar100% (4)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Assignment #1Documento114 pagineAssignment #1Yumna KhalidNessuna valutazione finora
- Module 7 Linear Programming The Simplex Method AnswersDocumento27 pagineModule 7 Linear Programming The Simplex Method AnswersEdward AroncianoNessuna valutazione finora
- Unit Test PolynomialsDocumento16 pagineUnit Test PolynomialscidNessuna valutazione finora
- Sensitivity Analysis (Revised)Documento47 pagineSensitivity Analysis (Revised)Janine CayabyabNessuna valutazione finora
- Numerical Integration and DifferentiationDocumento41 pagineNumerical Integration and DifferentiationDocTor DOOMNessuna valutazione finora
- Chapter 2Documento36 pagineChapter 2Shaine C. SantosNessuna valutazione finora
- Synthetic DivisionDocumento4 pagineSynthetic DivisionNhics Garcia100% (3)
- Strassen's Matrix MultDocumento15 pagineStrassen's Matrix MultmishraelectricNessuna valutazione finora
- Deshe Bideshe MMMDocumento106 pagineDeshe Bideshe MMMjesonNessuna valutazione finora
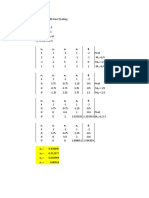
- 1 2 2 Table 3.3 Convergent Jacobi Iteration For The Linear System 1Documento4 pagine1 2 2 Table 3.3 Convergent Jacobi Iteration For The Linear System 1Eleonor Pacomios-VirtudazoNessuna valutazione finora
- Unit 1 Linear Programming ProblemDocumento56 pagineUnit 1 Linear Programming ProblemSofoniasNessuna valutazione finora
- 4.1 Matrices: (Refer Lecture Notes) (Refer Lecture Notes)Documento4 pagine4.1 Matrices: (Refer Lecture Notes) (Refer Lecture Notes)Mohd Zafri Abu ZarimNessuna valutazione finora
- Lectures PDFDocumento167 pagineLectures PDFPriyadi Widodo100% (1)
- Lecture 9 - Function Approximation and InterpolationDocumento26 pagineLecture 9 - Function Approximation and InterpolationMatthew Travis AlcantaraNessuna valutazione finora
- Math AssignmentDocumento58 pagineMath Assignmenttoslim jahidNessuna valutazione finora
- Linear Programming Problems The Simplex Method: Dr. Siddhalingeshwar I.GDocumento27 pagineLinear Programming Problems The Simplex Method: Dr. Siddhalingeshwar I.GPraveenNessuna valutazione finora
- Numerical Method (Secant Method)Documento20 pagineNumerical Method (Secant Method)Bhuwan DahalNessuna valutazione finora
- Adding+Subtracting PolynomialsDocumento4 pagineAdding+Subtracting PolynomialsPatricio Tuppiyac Jr.Nessuna valutazione finora
- American Mathematical SocietyDocumento8 pagineAmerican Mathematical SocietycaiosgcNessuna valutazione finora
- Linear Programming (Graphical Method) : March 2015Documento11 pagineLinear Programming (Graphical Method) : March 2015Indah RiyadiNessuna valutazione finora
- Dr. Joon-Yeoul Oh: IEEN 5335 Principles of OptimizationDocumento27 pagineDr. Joon-Yeoul Oh: IEEN 5335 Principles of OptimizationSoumojit KumarNessuna valutazione finora
- Numerical Methods Lesson PlanDocumento10 pagineNumerical Methods Lesson PlanSakiAtScribdNessuna valutazione finora
- Tiket Masuk Print EkonmtrkaDocumento11 pagineTiket Masuk Print EkonmtrkaEkaayu pratiwiNessuna valutazione finora
- Vehicle Routing Problem With Time Windows PDFDocumento129 pagineVehicle Routing Problem With Time Windows PDFDenisFerreiraNessuna valutazione finora
- Tarea 2 - Solución de Modelos de Programación Lineal de DecisiónDocumento9 pagineTarea 2 - Solución de Modelos de Programación Lineal de DecisiónMaria OrozcoNessuna valutazione finora
- Theory 2 - Moment Distribution Method Sample ProblemsDocumento20 pagineTheory 2 - Moment Distribution Method Sample ProblemsJohn Paul Liwaliw100% (1)
- Numerical Method: One Error EstimationDocumento32 pagineNumerical Method: One Error EstimationFraol TesfalemNessuna valutazione finora
- Compilations of AlgorithmsDocumento28 pagineCompilations of AlgorithmsJessica NacesNessuna valutazione finora
- Week 1 Polynomial FunctionsDocumento21 pagineWeek 1 Polynomial FunctionspotatersNessuna valutazione finora