Potrebbero piacerti anche
- Saudi Arabia Companies Contact DetailsDocumento64 pagineSaudi Arabia Companies Contact DetailsYAGHMOURE ABDALRAHMAN86% (69)
- StopwatchDocumento40 pagineStopwatchMani SinghNessuna valutazione finora
- Aesa Vs PesaDocumento30 pagineAesa Vs Pesakab11512100% (1)
- Star WarsDocumento28 pagineStar Warsalex1971Nessuna valutazione finora
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Da EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Nessuna valutazione finora
- Daikin LXE10E-A - Service Manual (TR 01-09B) PDFDocumento238 pagineDaikin LXE10E-A - Service Manual (TR 01-09B) PDFmail4ksnNessuna valutazione finora
- A Portfolio Strategy: To Execute Your Digital TransformationDocumento10 pagineA Portfolio Strategy: To Execute Your Digital TransformationKyaw Htet LuNessuna valutazione finora
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationDa EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNessuna valutazione finora
- Erich Segal Doctors PDFDocumento2 pagineErich Segal Doctors PDFAlicia13% (8)
- ISO 27001 Gap Analysis ChecklistDocumento6 pagineISO 27001 Gap Analysis Checklistlijo jacob70% (10)
- Modbus ProtocolDocumento28 pagineModbus Protocolgovardhan50Nessuna valutazione finora
- Interfacing The Keyboard To 8051 Micro Controller 11Documento10 pagineInterfacing The Keyboard To 8051 Micro Controller 11rajinikanth100% (1)
- 07h7901 - CELL-DYN 1800Documento41 pagine07h7901 - CELL-DYN 1800Bui Duy Quang100% (1)
- From GSM to LTE-Advanced Pro and 5G: An Introduction to Mobile Networks and Mobile BroadbandDa EverandFrom GSM to LTE-Advanced Pro and 5G: An Introduction to Mobile Networks and Mobile BroadbandNessuna valutazione finora
- Digital RPTDocumento12 pagineDigital RPTDexter FengNessuna valutazione finora
- Documentatie-Sistem de ComunicațieDocumento12 pagineDocumentatie-Sistem de ComunicațieTeodora FurcoviciNessuna valutazione finora
- Baud Rate Generator:: Homework Assignment # 4Documento5 pagineBaud Rate Generator:: Homework Assignment # 4Badrinath Balasubramanian100% (1)
- A Built-In Hamming Code ECC CircuitDocumento7 pagineA Built-In Hamming Code ECC CircuitMayur AnvekarNessuna valutazione finora
- Design and Implementation of Turbo Decoder For IEEE-802.16e and LTE StandardsDocumento6 pagineDesign and Implementation of Turbo Decoder For IEEE-802.16e and LTE StandardsghionoiucNessuna valutazione finora
- GMSK Demodulator Using Costas Loop For Software-Defined RadioDocumento5 pagineGMSK Demodulator Using Costas Loop For Software-Defined RadioRanjith ReddyNessuna valutazione finora
- SystemVue 2002AppNote PDFDocumento6 pagineSystemVue 2002AppNote PDFCu BomNessuna valutazione finora
- 02 Students Manual Zigbee Lab1Documento16 pagine02 Students Manual Zigbee Lab1Ahmed KNessuna valutazione finora
- Scs2101-Class Assignment-N01521664rDocumento5 pagineScs2101-Class Assignment-N01521664rugwakNessuna valutazione finora
- 1 Background To The Design and Evaluation WorkDocumento6 pagine1 Background To The Design and Evaluation WorkMohamed YaacoubNessuna valutazione finora
- Project 2Documento19 pagineProject 2Gaurav BaluNessuna valutazione finora
- Channel Coding Techniques in TetraDocumento12 pagineChannel Coding Techniques in TetraAdnan Shehzad100% (1)
- Lab 5Documento8 pagineLab 5maheshasicNessuna valutazione finora
- Lecture 11: Registers: DOC112: Computer Hardware Lecture 11 1Documento4 pagineLecture 11: Registers: DOC112: Computer Hardware Lecture 11 1Jagdeep ArryNessuna valutazione finora
- Top Ten Considerations For Devicewise ConfigurationsDocumento14 pagineTop Ten Considerations For Devicewise ConfigurationsFabiocamargo26Nessuna valutazione finora
- A3233q48 140313 V01 enDocumento15 pagineA3233q48 140313 V01 enfreezsoli4576Nessuna valutazione finora
- Serial CommunicationsDocumento23 pagineSerial CommunicationsPhuoc Trung Tran100% (1)
- YD2010A Communication ProtocolDocumento9 pagineYD2010A Communication ProtocolHmcc HoangNessuna valutazione finora
- Lecture 11: Registers: DOC112: Computer Hardware Lecture 11 1Documento4 pagineLecture 11: Registers: DOC112: Computer Hardware Lecture 11 1Taqi ShahNessuna valutazione finora
- Development of Wimax Physical Layer Building BlocksDocumento5 pagineDevelopment of Wimax Physical Layer Building BlocksSandeep Kaur BhullarNessuna valutazione finora
- Nguyen 227316 Wireshark ReportDocumento21 pagineNguyen 227316 Wireshark ReportDuc Thanh NguyenNessuna valutazione finora
- Emb C QB - Unit IiiDocumento15 pagineEmb C QB - Unit IiiANANTHI SNessuna valutazione finora
- GB 20600-2006 EnglishDocumento123 pagineGB 20600-2006 EnglishSharath PadaruNessuna valutazione finora
- Simulation of Turbo Codes: Ex - No: 11Documento12 pagineSimulation of Turbo Codes: Ex - No: 11bbmathiNessuna valutazione finora
- Fabbc9: Convert Hexadecimal To BinaryDocumento11 pagineFabbc9: Convert Hexadecimal To BinaryShan NavasNessuna valutazione finora
- 32-Channel Waveform Generator Implemented Using Actel's Axcelerator FPGADocumento13 pagine32-Channel Waveform Generator Implemented Using Actel's Axcelerator FPGASrinivas CherukuNessuna valutazione finora
- Communication System Lecture 3-2Documento9 pagineCommunication System Lecture 3-2miro jasimNessuna valutazione finora
- A GSM Simulation Platform Using MATLABDocumento9 pagineA GSM Simulation Platform Using MATLABmishranamit2211Nessuna valutazione finora
- Real-Time Clock Using 8253Documento11 pagineReal-Time Clock Using 8253Chandravadhana NarayananNessuna valutazione finora
- Agilent Incremental Redundancy in EGPRS: Application NoteDocumento16 pagineAgilent Incremental Redundancy in EGPRS: Application Noteginny87Nessuna valutazione finora
- Wireshark LabDocumento9 pagineWireshark Labsivaabhilash100% (1)
- Implementing An 8b/10b Encoder/Decoder For Gigabit Ethernet in The Actel SX FPGA FamilyDocumento20 pagineImplementing An 8b/10b Encoder/Decoder For Gigabit Ethernet in The Actel SX FPGA FamilyDario SantosNessuna valutazione finora
- Serial UART Communication Using MicrocontrollerDocumento12 pagineSerial UART Communication Using MicrocontrollerGaurav Gupta100% (1)
- Development of FSM Based Running Disparity Controlled 8b/10b Encoder/Decoder With Fast Error Detection Mechanism.Documento14 pagineDevelopment of FSM Based Running Disparity Controlled 8b/10b Encoder/Decoder With Fast Error Detection Mechanism.HCTL OpenNessuna valutazione finora
- Using The CX One Version 3 Data Trace FunctionDocumento18 pagineUsing The CX One Version 3 Data Trace FunctionEd CaranayNessuna valutazione finora
- Uart DesignDocumento20 pagineUart Designtrung100% (2)
- Design and Implementation of 2 Bits BCH Error Correcting Codes Using FPGADocumento7 pagineDesign and Implementation of 2 Bits BCH Error Correcting Codes Using FPGAJournal of TelecommunicationsNessuna valutazione finora
- Transferring Data With Variable Message Lengths Via The TCP ProtocolDocumento22 pagineTransferring Data With Variable Message Lengths Via The TCP ProtocolNgô Tiến PhúNessuna valutazione finora
- Power Quality MeterDocumento12 paginePower Quality MeterSarmadRSNessuna valutazione finora
- BER MeterDocumento8 pagineBER Metersakti prasad nandaNessuna valutazione finora
- JY-61 MPU6050 Module User Manual by ElecmasterDocumento12 pagineJY-61 MPU6050 Module User Manual by ElecmasterElecmaster100% (1)
- Register FileDocumento6 pagineRegister FilejayaprasadkalluriNessuna valutazione finora
- ReportDocumento7 pagineReportAnitha LincyNessuna valutazione finora
- M Bus Documentation AnnotationsDocumento80 pagineM Bus Documentation AnnotationsmcmayerNessuna valutazione finora
- nternational Journal of Computational Engineering Research(IJCER) is an intentional online Journal in English monthly publishing journal. This Journal publish original research work that contributes significantly to further the scientific knowledge in engineering and Technology.Documento6 paginenternational Journal of Computational Engineering Research(IJCER) is an intentional online Journal in English monthly publishing journal. This Journal publish original research work that contributes significantly to further the scientific knowledge in engineering and Technology.International Journal of computational Engineering research (IJCER)Nessuna valutazione finora
- WiMAX Channel Simulation Uni ReportDocumento5 pagineWiMAX Channel Simulation Uni Reportandygray119Nessuna valutazione finora
- Micro Controller Based Digital Clock With CalendarDocumento8 pagineMicro Controller Based Digital Clock With CalendarPratyay Dhar33% (3)
- Unit - IvDocumento48 pagineUnit - IvJit AggNessuna valutazione finora
- DocumentDocumento35 pagineDocumentAnonymous Nlaa5HNessuna valutazione finora
- ECSE 548 - Electronic Design and Implementation of The Sine Function On 8-Bit MIPS Processor - ReportDocumento4 pagineECSE 548 - Electronic Design and Implementation of The Sine Function On 8-Bit MIPS Processor - Reportpiohm100% (1)
- Statistical Data Cleaning with Applications in RDa EverandStatistical Data Cleaning with Applications in RNessuna valutazione finora
- Internet of Things: Architectures, Protocols and StandardsDa EverandInternet of Things: Architectures, Protocols and StandardsNessuna valutazione finora
- MrWyneMyatKyawCV Form 1Documento3 pagineMrWyneMyatKyawCV Form 1Kyaw Htet LuNessuna valutazione finora
- DNS 345 Datasheet enDocumento4 pagineDNS 345 Datasheet enKyaw Htet LuNessuna valutazione finora
- Used Car Sales Receipt: Essential ChecklistDocumento1 paginaUsed Car Sales Receipt: Essential ChecklistKyaw Htet LuNessuna valutazione finora
- DNS 345 A1 Qig v1 en EsDocumento56 pagineDNS 345 A1 Qig v1 en EsKyaw Htet LuNessuna valutazione finora
- 24 FJ 128 Ga 306Documento406 pagine24 FJ 128 Ga 306Kyaw Htet LuNessuna valutazione finora
- H 7Documento4 pagineH 7Kyaw Htet LuNessuna valutazione finora
- Problems Involving Sequences: Grade 10Documento9 pagineProblems Involving Sequences: Grade 10Jhiemalyn RonquilloNessuna valutazione finora
- Position, Velocity and AccelerationDocumento12 paginePosition, Velocity and Accelerationpeter vuNessuna valutazione finora
- Gma 5013Documento10 pagineGma 5013janurtpatNessuna valutazione finora
- The Child's Learning of English Morphology: WORDDocumento29 pagineThe Child's Learning of English Morphology: WORDCatnis TomNessuna valutazione finora
- Introduction To Game Theory: Analysis of GamesDocumento13 pagineIntroduction To Game Theory: Analysis of GamesAoiNessuna valutazione finora
- Lecture Note On Photovoltaic CellDocumento1 paginaLecture Note On Photovoltaic CellHaseeb NawazNessuna valutazione finora
- Flotech Corporate FlyerDocumento6 pagineFlotech Corporate FlyerPrasetyo PNPNessuna valutazione finora
- An Introduction To Formal Language and Automata Solution Manual PDFDocumento4 pagineAn Introduction To Formal Language and Automata Solution Manual PDFAsad IkramNessuna valutazione finora
- ReadMeCS5 OptionalPluginDocumento6 pagineReadMeCS5 OptionalPluginLuismanuel LuisNessuna valutazione finora
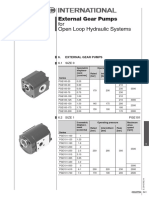
- External Gear Pumps For Open Loop Hydraulic SystemsDocumento2 pagineExternal Gear Pumps For Open Loop Hydraulic SystemsBlashko GjorgjievNessuna valutazione finora
- Lean ConstructionDocumento37 pagineLean ConstructionMohamed Talaat ElsheikhNessuna valutazione finora
- T. Murugan: Post Applied For Well Testing OperatorDocumento5 pagineT. Murugan: Post Applied For Well Testing Operatorjohn MNessuna valutazione finora
- Jaquar Sanitarywares PricelistDocumento8 pagineJaquar Sanitarywares PricelistAnil KumarNessuna valutazione finora
- Spring 2010 MidTerm OPKST CS101 Bc100200572Documento6 pagineSpring 2010 MidTerm OPKST CS101 Bc100200572cs619finalproject.comNessuna valutazione finora
- Bird Strike ThesisDocumento7 pagineBird Strike Thesisarianadavishighpoint100% (2)
- Exercicios de PhonicsDocumento51 pagineExercicios de Phonicsms. TeixeiraNessuna valutazione finora
- Siasun Company IntroDocumento34 pagineSiasun Company IntromoneeshveeraNessuna valutazione finora
- Pre Delivery Inspection Checklist For Home Oxygen ConcentratorDocumento2 paginePre Delivery Inspection Checklist For Home Oxygen ConcentratorPranavKaisthaNessuna valutazione finora
- Fragility Curves For Mixed Concrete-Steel Frames Subjected To SeismicDocumento5 pagineFragility Curves For Mixed Concrete-Steel Frames Subjected To SeismicJulián PovedaNessuna valutazione finora
- Approaches To Curriculum DesigningDocumento20 pagineApproaches To Curriculum DesigningCristel CatapangNessuna valutazione finora
- Slot 22-23-24 Real Time CommunicationDocumento50 pagineSlot 22-23-24 Real Time CommunicationLinh BuiNessuna valutazione finora
- 1.vedantu - Class 3 To 5 - BrochureDocumento1 pagina1.vedantu - Class 3 To 5 - BrochureDeepak SharmaNessuna valutazione finora
- BITS Pilani: Scale Up and Post Approval ChangesDocumento56 pagineBITS Pilani: Scale Up and Post Approval ChangesshrikantmsdNessuna valutazione finora
- FWD Week 47 Learning Material For Alaric YeoDocumento7 pagineFWD Week 47 Learning Material For Alaric YeoarielNessuna valutazione finora