Potrebbero piacerti anche
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesDa EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNessuna valutazione finora
- Distributed Adaptive Droop Control For DC Distribution SystemsDocumento13 pagineDistributed Adaptive Droop Control For DC Distribution SystemsArian MahdavianNessuna valutazione finora
- Team-Oriented Load Sharing in Parallel DC-DC ConvertersDocumento12 pagineTeam-Oriented Load Sharing in Parallel DC-DC ConvertersNawara NawaraNessuna valutazione finora
- A Novel Fault Tolerant Control Method For Interleaved DC-DC Converters Under Switch Fault ConditionDocumento9 pagineA Novel Fault Tolerant Control Method For Interleaved DC-DC Converters Under Switch Fault Conditionjeos20132013Nessuna valutazione finora
- 2021 Chilecon Pinv15-584Documento5 pagine2021 Chilecon Pinv15-584EdgarNessuna valutazione finora
- Mathematics 10 02818 v2Documento19 pagineMathematics 10 02818 v2Abd Ur RehmanNessuna valutazione finora
- 2008 23 6 IEEE PELS Dual PhaseshiftDocumento10 pagine2008 23 6 IEEE PELS Dual PhaseshiftDEBARATI DAMNessuna valutazione finora
- Voltage Control of DC-DC Three Level Boost Converter Using TS Fuzzy PI ControllerDocumento6 pagineVoltage Control of DC-DC Three Level Boost Converter Using TS Fuzzy PI ControllerThamazighth HaddadNessuna valutazione finora
- SPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDFDocumento7 pagineSPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDF张明Nessuna valutazione finora
- PSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLDocumento9 paginePSCAD EMTDC, FuzzyControl, HVDC Transmission, VoltageDependentCurrentOrderLimit VDCOLKurniawan Indra LeksanaNessuna valutazione finora
- Base PaperDocumento11 pagineBase PapersaiNessuna valutazione finora
- A Review On Stability Analysis Methods For Switching Mode Power ConvertersDocumento14 pagineA Review On Stability Analysis Methods For Switching Mode Power ConvertersSandhya Rathore PrasadNessuna valutazione finora
- IEEEJESTPE2106Documento10 pagineIEEEJESTPE2106محمد عقيل عبد الامير ستارNessuna valutazione finora
- A Wireless Power Transfer System With Inverse Coupled Current Doubler Rectifier For High-Output Current ApplicationsDocumento10 pagineA Wireless Power Transfer System With Inverse Coupled Current Doubler Rectifier For High-Output Current Applicationsmeenujataj469481Nessuna valutazione finora
- Sruthirajp2015Documento6 pagineSruthirajp2015NikeshManandharNessuna valutazione finora
- State-space model of grid-connected inverters under current controlDocumento10 pagineState-space model of grid-connected inverters under current controloussama sadkiNessuna valutazione finora
- Coordinated Control of Distributed Energy Storage System With Tap Changer Transformers For Voltage Rise Mitigation Under High Photovoltaic PenetrationDocumento10 pagineCoordinated Control of Distributed Energy Storage System With Tap Changer Transformers For Voltage Rise Mitigation Under High Photovoltaic PenetrationEvellyne ChrisNessuna valutazione finora
- Back-To-Back Converter Design and Control For Synchronous Generator-Based Wind TurbinesDocumento8 pagineBack-To-Back Converter Design and Control For Synchronous Generator-Based Wind TurbinesBinh NgoNessuna valutazione finora
- Automatic Tuning of Cascaded Controllers for Power Converters using Eigenvalue Parametric SensitivitiesDocumento11 pagineAutomatic Tuning of Cascaded Controllers for Power Converters using Eigenvalue Parametric SensitivitiesAdnan KutsiNessuna valutazione finora
- Improving Control Performance in DC Micro-Grids With Distributed GenerationsDocumento12 pagineImproving Control Performance in DC Micro-Grids With Distributed GenerationsmariniNessuna valutazione finora
- Primary Voltage Control of A Single-Phase Inverter Using Linear Quadratic Regulator With IntegratorDocumento8 paginePrimary Voltage Control of A Single-Phase Inverter Using Linear Quadratic Regulator With IntegratorSwagath Kumar PandaNessuna valutazione finora
- Fuel Cell ConverterDocumento5 pagineFuel Cell ConverterPraKadNoiNessuna valutazione finora
- Simulation and Implementation of Grid-Connected InvertersDocumento10 pagineSimulation and Implementation of Grid-Connected Invertersgiongan342Nessuna valutazione finora
- Interactive Distributed Generation Interface For Flexible Micro-Grid Operation in Smart Distribution SystemsDocumento11 pagineInteractive Distributed Generation Interface For Flexible Micro-Grid Operation in Smart Distribution SystemsahmedrizwanchampNessuna valutazione finora
- Model Predictive Control of Voltages in Active Distribution NetworksDocumento10 pagineModel Predictive Control of Voltages in Active Distribution NetworksDiogo MarujoNessuna valutazione finora
- Tuning of Control Loops For Grid Connected Voltage Source ConvertersDocumento6 pagineTuning of Control Loops For Grid Connected Voltage Source ConvertersThiago Moura GalvãoNessuna valutazione finora
- 1.cascaded Two-Level Inverter-Based Multilevel STATCOM For High-Power ApplicationsDocumento9 pagine1.cascaded Two-Level Inverter-Based Multilevel STATCOM For High-Power ApplicationsSivareddy MudiyalaNessuna valutazione finora
- Design of High-Efficiency Isolated Bidirectional DC DC Converter With Single-Input Multiple-OutputsDocumento18 pagineDesign of High-Efficiency Isolated Bidirectional DC DC Converter With Single-Input Multiple-OutputsHsekum RamukNessuna valutazione finora
- Electrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandDocumento8 pagineElectrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandNabin AdhikariNessuna valutazione finora
- Frequency_Stability_of_Synchronous_Machines_and_Grid-Forming_Power_ConvertersDocumento15 pagineFrequency_Stability_of_Synchronous_Machines_and_Grid-Forming_Power_Convertersdckien2002Nessuna valutazione finora
- IEEEPE1103 CurrentRep PDFDocumento10 pagineIEEEPE1103 CurrentRep PDFAbhishek KumarNessuna valutazione finora
- Taranto1992 PDFDocumento5 pagineTaranto1992 PDFGustavo MezaNessuna valutazione finora
- 10 1016@j Isatra 2020 05 015 PDFDocumento16 pagine10 1016@j Isatra 2020 05 015 PDFFarid KhouchaNessuna valutazione finora
- A Benchmark System For Digital Time-Domain Simulation of An Active Power FilterDocumento8 pagineA Benchmark System For Digital Time-Domain Simulation of An Active Power FilterAndreeaNessuna valutazione finora
- Distributed Cooperative Control For Parallel Direct Current-Direct Current Buck Converters Based On Multi-Agent Consensus TheoryDocumento10 pagineDistributed Cooperative Control For Parallel Direct Current-Direct Current Buck Converters Based On Multi-Agent Consensus TheoryNawara NawaraNessuna valutazione finora
- Stability Analysis and Controller Design for DC Microgrids with Constant Power LoadsDocumento8 pagineStability Analysis and Controller Design for DC Microgrids with Constant Power Loadspavan gangwarNessuna valutazione finora
- 1 s2.0 S0378779622008823 MainDocumento17 pagine1 s2.0 S0378779622008823 MainSouhila Rached ZINENessuna valutazione finora
- 1 - Bidram2012Documento14 pagine1 - Bidram2012kareemNessuna valutazione finora
- A Novel Strategy For Three Phase Grid Connected Pulse Width Modulated VSI2018Documento4 pagineA Novel Strategy For Three Phase Grid Connected Pulse Width Modulated VSI2018DrRitesh DashNessuna valutazione finora
- An Interleaved Bi-Directional AC-DC ConverterDocumento5 pagineAn Interleaved Bi-Directional AC-DC ConverterAsad HameedNessuna valutazione finora
- Hysteresis Model Predictive Control For High-Power Grid-Connected Inverters With Output LCL FilterDocumento11 pagineHysteresis Model Predictive Control For High-Power Grid-Connected Inverters With Output LCL FilterDaniel PGNessuna valutazione finora
- 1 s2.0 S0142061523004568 MainDocumento10 pagine1 s2.0 S0142061523004568 MainMinh Tạ ĐứcNessuna valutazione finora
- DSP Based Control of Interleaved Boost ConverterDocumento11 pagineDSP Based Control of Interleaved Boost ConverterDany ApablazaNessuna valutazione finora
- Double Integral SMCDocumento11 pagineDouble Integral SMCrida abbasNessuna valutazione finora
- Distributed Optimal Frequency ControlDocumento11 pagineDistributed Optimal Frequency Controloctober87Nessuna valutazione finora
- Grid-Tied and Stand-Alone Operation of Distributed Generation Modules Aggregated by Cascaded Boost ConvertersDocumento9 pagineGrid-Tied and Stand-Alone Operation of Distributed Generation Modules Aggregated by Cascaded Boost ConvertersNagulapati KiranNessuna valutazione finora
- Model Predictive Control of An Inverter PDFDocumento9 pagineModel Predictive Control of An Inverter PDFlordgtyNessuna valutazione finora
- Adaptive Droop Control Strategy For Load Sharing and Circulating Current Minimization in Low-Voltage Standalone DC MicrogridDocumento10 pagineAdaptive Droop Control Strategy For Load Sharing and Circulating Current Minimization in Low-Voltage Standalone DC MicrogridFuture Science AcademyNessuna valutazione finora
- Dynamic Voltage Stability Enhancement of A Grid-Connected Wind Power System by ANFIS Controlled Static Var CompensatorDocumento4 pagineDynamic Voltage Stability Enhancement of A Grid-Connected Wind Power System by ANFIS Controlled Static Var CompensatorEngr GM SialNessuna valutazione finora
- GridDocumento6 pagineGridgiongan342Nessuna valutazione finora
- AouiniDocumento9 pagineAouinihappyworryNessuna valutazione finora
- Wound Rotor Machine With Single-Phase Stator and Three-Phase Rotor Windings Controlled by Isolated Three-Phase InverterDocumento11 pagineWound Rotor Machine With Single-Phase Stator and Three-Phase Rotor Windings Controlled by Isolated Three-Phase InverterBook4AllNessuna valutazione finora
- Vector Controlled Induction Machines for Stand-Alone Wind Energy ApplicationsDocumento8 pagineVector Controlled Induction Machines for Stand-Alone Wind Energy Applicationssatyam swarup dubeyNessuna valutazione finora
- Response Coordination of Distributed Generation and Tap Changers For Voltage SupportDocumento7 pagineResponse Coordination of Distributed Generation and Tap Changers For Voltage SupportraghudtsNessuna valutazione finora
- Decentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlDocumento10 pagineDecentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlNirav ChauhanNessuna valutazione finora
- Seamless Dynamics For Wild-Frequency Active Rectifiers in More Electric AircraftDocumento11 pagineSeamless Dynamics For Wild-Frequency Active Rectifiers in More Electric AircraftBadal PatnaikNessuna valutazione finora
- Sliding Mode Control of Power Converters and Electrical DrivesDocumento260 pagineSliding Mode Control of Power Converters and Electrical Drivesleoh1223Nessuna valutazione finora
- An Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsDocumento11 pagineAn Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsRiad TifaNessuna valutazione finora
- 10 1109@tie 2017 2698425 PDFDocumento12 pagine10 1109@tie 2017 2698425 PDFRiad TifaNessuna valutazione finora
- 3 Maison PDFDocumento6 pagine3 Maison PDFRiad TifaNessuna valutazione finora
- WSN 672 2017 126 148 2Documento24 pagineWSN 672 2017 126 148 2Amit DostNessuna valutazione finora
- 74 Adaptive Decentralized Droop ControllerDocumento11 pagine74 Adaptive Decentralized Droop ControllerRiad TifaNessuna valutazione finora
- Economic Comparison of Solar PV and Diesel Water Pumping SystemDocumento6 pagineEconomic Comparison of Solar PV and Diesel Water Pumping SystemRiad TifaNessuna valutazione finora
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDocumento16 pagineControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaNessuna valutazione finora
- 10 1109@tie 2017 2698425 PDFDocumento12 pagine10 1109@tie 2017 2698425 PDFRiad TifaNessuna valutazione finora
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDocumento16 pagineControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaNessuna valutazione finora
- Homer PaperDocumento13 pagineHomer PaperRiad TifaNessuna valutazione finora
- Design of Solar Water Pumping System With FCMA Soft StarterDocumento4 pagineDesign of Solar Water Pumping System With FCMA Soft StarterRiad TifaNessuna valutazione finora
- ICREEC'2019: International Conference on Renewable Energy and Energy ConversionDocumento2 pagineICREEC'2019: International Conference on Renewable Energy and Energy ConversionRiad TifaNessuna valutazione finora
- Solar PV Array Fed Water Pumping Using BLDC Motor Drive With Boost-Buck ConverterDocumento8 pagineSolar PV Array Fed Water Pumping Using BLDC Motor Drive With Boost-Buck ConverterRiad TifaNessuna valutazione finora
- Solar PV-Battery Based Hybrid Water Pumping System Using BLDC Motor DriveDocumento6 pagineSolar PV-Battery Based Hybrid Water Pumping System Using BLDC Motor DriveRiad TifaNessuna valutazione finora
- 07041977Documento6 pagine07041977Riad TifaNessuna valutazione finora
- 07038525Documento6 pagine07038525Riad TifaNessuna valutazione finora
- Optoacoplador Integrado 4N25Documento7 pagineOptoacoplador Integrado 4N25aureliocsNessuna valutazione finora
- 07418710Documento4 pagine07418710Riad TifaNessuna valutazione finora
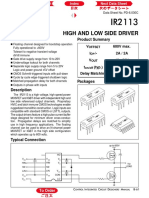
- High and Low Side Driver: Features Product SummaryDocumento14 pagineHigh and Low Side Driver: Features Product SummaryMiguel GalvánNessuna valutazione finora
- High and Low Side Driver: Features Product SummaryDocumento14 pagineHigh and Low Side Driver: Features Product SummaryMiguel GalvánNessuna valutazione finora
- Modeling of A Number of Heat Pump Water Heaters As Control Equipment For Load Frequency Control in Power SystemsDocumento7 pagineModeling of A Number of Heat Pump Water Heaters As Control Equipment For Load Frequency Control in Power SystemsRiad TifaNessuna valutazione finora
- IRFP460Documento9 pagineIRFP460yusufwpNessuna valutazione finora
- Air Source Heat Pump A Key Role in The Development of Smart Buildings in Future Energy SystemsDocumento6 pagineAir Source Heat Pump A Key Role in The Development of Smart Buildings in Future Energy SystemsRiad TifaNessuna valutazione finora
- PDFDocumento4 paginePDFRiad TifaNessuna valutazione finora
- Design and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemDocumento8 pagineDesign and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemRiad TifaNessuna valutazione finora
- Performance Analysis of A Directly Coupled Photovoltaic Water-Pumping SystemDocumento6 paginePerformance Analysis of A Directly Coupled Photovoltaic Water-Pumping SystemRiad TifaNessuna valutazione finora
- Supplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersDocumento10 pagineSupplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersRiad TifaNessuna valutazione finora
- Supplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersDocumento10 pagineSupplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersRiad TifaNessuna valutazione finora
- Design and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemDocumento8 pagineDesign and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemRiad TifaNessuna valutazione finora
- FB22MDocumento10 pagineFB22MPerfect GeneratorsNessuna valutazione finora
- EngineeringGeophysics4thstagelecturesDr WadhahM ShakirDocumento66 pagineEngineeringGeophysics4thstagelecturesDr WadhahM ShakirwalideNessuna valutazione finora
- Prosedur Kerja ElektrikDocumento9 pagineProsedur Kerja ElektrikGalang PratamaNessuna valutazione finora
- Honeywell S8600HDocumento20 pagineHoneywell S8600HmariopilarNessuna valutazione finora
- Post Installed RebarsDocumento41 paginePost Installed RebarsGaurav ChobeNessuna valutazione finora
- SPA Extreme Manual - FIADocumento20 pagineSPA Extreme Manual - FIATommy De CockNessuna valutazione finora
- GSCC006 Rev3Documento25 pagineGSCC006 Rev3Palade CristiNessuna valutazione finora
- SADS Master Data GuideDocumento10 pagineSADS Master Data Guidedexterbox1Nessuna valutazione finora
- Product Catalog: Circuit Protection ProductsDocumento164 pagineProduct Catalog: Circuit Protection Productsionn comNessuna valutazione finora
- Sheet Kinematics Student Copy With AnsDocumento44 pagineSheet Kinematics Student Copy With AnsSwatiNessuna valutazione finora
- Fourier Transforms: Learning OutcomesDocumento13 pagineFourier Transforms: Learning OutcomesBeam MoonNessuna valutazione finora
- 10.1007@978 3 030 21638 2Documento214 pagine10.1007@978 3 030 21638 2dortiNessuna valutazione finora
- Heat and Mass Transfer Lab ManualDocumento88 pagineHeat and Mass Transfer Lab ManualASWIN VICTOR .ENessuna valutazione finora
- G 12 M1Documento4 pagineG 12 M1Hui ZhengNessuna valutazione finora
- Transition Element PropertiesDocumento29 pagineTransition Element PropertiesMinaNessuna valutazione finora
- Vibration Control Technology Industry (Freudenberg Schwab)Documento111 pagineVibration Control Technology Industry (Freudenberg Schwab)ismailNessuna valutazione finora
- SUBMARINE POWER BY SMART DC MICROGRIDDocumento21 pagineSUBMARINE POWER BY SMART DC MICROGRIDgoreanousNessuna valutazione finora
- HSSRPTR +1 Physics Notes KamilDocumento104 pagineHSSRPTR +1 Physics Notes KamilAswithNessuna valutazione finora
- Dual-Band A-Panel Dual Polarization Half-Power Beam Width Fixed Electrical Downtilt Integrated CombinerDocumento1 paginaDual-Band A-Panel Dual Polarization Half-Power Beam Width Fixed Electrical Downtilt Integrated CombinerПётр НовиковNessuna valutazione finora
- Measurement of Horizontal and Vertical DistancesDocumento13 pagineMeasurement of Horizontal and Vertical DistancesFrannie BorrasNessuna valutazione finora
- 01 Samss 034 PDFDocumento19 pagine01 Samss 034 PDFnadeemNessuna valutazione finora
- ECS002 - Calculation For The Orifice Plate On The AC Lube Oil SystemDocumento9 pagineECS002 - Calculation For The Orifice Plate On The AC Lube Oil SystemPaul CarlyNessuna valutazione finora
- Chapter 2: Motion in One Dimension: Phys1000/32Documento5 pagineChapter 2: Motion in One Dimension: Phys1000/32ComfortNessuna valutazione finora
- CFD Is 456 2000Documento85 pagineCFD Is 456 2000Angel VargasNessuna valutazione finora
- 12th Maths EM 1 Marks Question Paper 1 English Medium PDF Download PDFDocumento4 pagine12th Maths EM 1 Marks Question Paper 1 English Medium PDF Download PDFSaravanan JNessuna valutazione finora
- 1503567144me 1206 1ST LabDocumento34 pagine1503567144me 1206 1ST Labcportrait artNessuna valutazione finora
- Energy and Phase ChangesDocumento18 pagineEnergy and Phase ChangesJohn Paul BelenNessuna valutazione finora
- Handbook of Port and Harbor Engineering Geotechnical and Structural Aspects-276-363Documento88 pagineHandbook of Port and Harbor Engineering Geotechnical and Structural Aspects-276-363ÄphinNessuna valutazione finora
- Thermodynamic Incompatibility of Proteins: Cloxford University PressDocumento10 pagineThermodynamic Incompatibility of Proteins: Cloxford University PressJose perezNessuna valutazione finora
- Repairing Concrete StructuresDocumento103 pagineRepairing Concrete StructuresengrirfanNessuna valutazione finora