Potrebbero piacerti anche
- Seal Kit Seal KitDocumento61 pagineSeal Kit Seal KitМаксим Стратила0% (1)
- Unit-5 - Balancing of Reciprocating MassesDocumento83 pagineUnit-5 - Balancing of Reciprocating MassesHareesha N GNessuna valutazione finora
- CH 19Documento21 pagineCH 19Sanjay Kumar100% (1)
- ME2115 - Forced Vibration PDFDocumento49 pagineME2115 - Forced Vibration PDFwee kian pungNessuna valutazione finora
- Chap - 15Documento50 pagineChap - 15Arup Das100% (1)
- ChaindriveDocumento40 pagineChaindriverana__singhNessuna valutazione finora
- Preferred SeriesDocumento3 paginePreferred SeriesVaibhav PawarNessuna valutazione finora
- Dom SolvedDocumento49 pagineDom SolvedRAJESH. RNessuna valutazione finora
- Roundel 1961-06 Vol 13 No 5Documento36 pagineRoundel 1961-06 Vol 13 No 5TateNessuna valutazione finora
- Mechatronics Unit III and IV Question and AnswersDocumento6 pagineMechatronics Unit III and IV Question and AnswersSaravanan MathiNessuna valutazione finora
- Unit IV Question Bank MV 2019 MDOFs PDFDocumento2 pagineUnit IV Question Bank MV 2019 MDOFs PDFSachin BharadwajNessuna valutazione finora
- L Gear TrainsDocumento88 pagineL Gear TrainsAditya Shubham Garg100% (1)
- GED 7 Life and Works of Jose RizalDocumento104 pagineGED 7 Life and Works of Jose RizalRheamie Fuyonan100% (1)
- Piping and Plumbing Symbols ListDocumento1 paginaPiping and Plumbing Symbols Listsiddarth amaravathiNessuna valutazione finora
- Gear Trains RevisedDocumento77 pagineGear Trains RevisedKiran ThunuguntlaNessuna valutazione finora
- Precooling and Storage FacilitiesDocumento136 paginePrecooling and Storage FacilitiesspurwonofjpNessuna valutazione finora
- Theory of MachinesDocumento3 pagineTheory of Machinesjaspreet singh100% (1)
- Me 8594 Dynamics of Machinery Unit 1 Online Video LectureDocumento42 pagineMe 8594 Dynamics of Machinery Unit 1 Online Video LecturesankarNessuna valutazione finora
- 1 DesignDocumento54 pagine1 DesignDr. Aung Ko LattNessuna valutazione finora
- Notes For Projection of Points and LinesDocumento14 pagineNotes For Projection of Points and LinesShantam Sinha100% (1)
- 4 Forced VibrationDocumento108 pagine4 Forced Vibrationsolomonrajar100% (2)
- Dom Unit 1Documento41 pagineDom Unit 1Martin SudhanNessuna valutazione finora
- Belt, Rope, Chain DrivesDocumento27 pagineBelt, Rope, Chain DrivesVijayasankar Kumararaja40% (5)
- 2018PPE8005 - Design of V Belt (Part 2)Documento15 pagine2018PPE8005 - Design of V Belt (Part 2)Kartik AggarwalNessuna valutazione finora
- Forced VibrationsDocumento17 pagineForced Vibrationssuhas110Nessuna valutazione finora
- Module 1 2 BBSahooDocumento78 pagineModule 1 2 BBSahooDheerajSharmaNessuna valutazione finora
- 01 KDOM Course HandoutDocumento14 pagine01 KDOM Course HandoutBhimsen ShresthaNessuna valutazione finora
- Mechanical Limit, Tolerance & FitsDocumento104 pagineMechanical Limit, Tolerance & FitssrinivasNessuna valutazione finora
- 11.kinematic SynthesisDocumento13 pagine11.kinematic SynthesisSatyam AhirwalNessuna valutazione finora
- Projection of Lines NewDocumento15 pagineProjection of Lines Newapi-3142832990% (1)
- Unit 6 Multiplate Clutches 25-1-2022Documento6 pagineUnit 6 Multiplate Clutches 25-1-2022Shweta BramhaneNessuna valutazione finora
- Design of Machine Elements2Documento14 pagineDesign of Machine Elements2Satwik PriyadarshiNessuna valutazione finora
- Belts, Ropes and Chain DrivesDocumento29 pagineBelts, Ropes and Chain Drivesnaveen_kumar29173017100% (1)
- Ch-4 Design of RivetDocumento15 pagineCh-4 Design of RivetTadesse AyalewNessuna valutazione finora
- Unit-1 Vehicle Frame and SuspensionDocumento41 pagineUnit-1 Vehicle Frame and SuspensionKrishna 1996Nessuna valutazione finora
- Dynamic Force AnalysisDocumento27 pagineDynamic Force AnalysisTim DrakeNessuna valutazione finora
- Design For Fluctuating LoadsDocumento35 pagineDesign For Fluctuating LoadsFeroz Ahmed Mazumder100% (4)
- CLUTCHDocumento22 pagineCLUTCHAnuj AwasthiNessuna valutazione finora
- Mdid Lab ManualDocumento48 pagineMdid Lab Manualjaimin777Nessuna valutazione finora
- Unit I Force AnalysisDocumento82 pagineUnit I Force AnalysisSaranNessuna valutazione finora
- Columns and Struts Unit-15Documento25 pagineColumns and Struts Unit-15Andree GeorgeaNessuna valutazione finora
- Unit 1. Fundamentals of Design Master b5Documento20 pagineUnit 1. Fundamentals of Design Master b5S VNessuna valutazione finora
- Model Zeroth Review PPT PhotoDocumento14 pagineModel Zeroth Review PPT PhotoLovely Mohan0% (1)
- Load Test On 4 Stroke Diesel EngineDocumento4 pagineLoad Test On 4 Stroke Diesel EngineRanjit DasNessuna valutazione finora
- DOM ProblemsSolvedinClassDocumento129 pagineDOM ProblemsSolvedinClassrukmini_ramkiNessuna valutazione finora
- Mechanics of Material - SyllabusDocumento2 pagineMechanics of Material - SyllabusRahul PatilNessuna valutazione finora
- Coupling: Basic Difference BetweenDocumento41 pagineCoupling: Basic Difference BetweenKadiyam VijayNessuna valutazione finora
- Theory of MachineDocumento21 pagineTheory of MachineVaibhav Vithoba NaikNessuna valutazione finora
- 2 Marks Previous Board Exam Questions & AnswersDocumento7 pagine2 Marks Previous Board Exam Questions & AnswersAkhil .sNessuna valutazione finora
- Exam Paper RGPV MMPD First SemDocumento45 pagineExam Paper RGPV MMPD First Semmayuresh_6767Nessuna valutazione finora
- Unit-III, Advanced Mechanisms PDFDocumento41 pagineUnit-III, Advanced Mechanisms PDFvamsi krishnaNessuna valutazione finora
- 28 Patriotic Bollywood Movies - Top Hindi Desh Bhakti Films PDFDocumento14 pagine28 Patriotic Bollywood Movies - Top Hindi Desh Bhakti Films PDFsukushNessuna valutazione finora
- PPC Loading and SchedulingDocumento11 paginePPC Loading and SchedulingHarshwardhan PhatakNessuna valutazione finora
- Me2303 - Design of Machine ElementsDocumento14 pagineMe2303 - Design of Machine ElementsGowtham RajNessuna valutazione finora
- CE6402-Strength of Materials PDFDocumento12 pagineCE6402-Strength of Materials PDFSathz FlynnNessuna valutazione finora
- Virtual LaboratoryDocumento14 pagineVirtual LaboratoryArie Febry Fardheny, MTNessuna valutazione finora
- Unit 5 - THIN CYLINDER MOSDocumento22 pagineUnit 5 - THIN CYLINDER MOSAsvath GuruNessuna valutazione finora
- 604 I.c.engine (Me-604) Exp. ManualDocumento35 pagine604 I.c.engine (Me-604) Exp. Manualnavaneet gupta100% (1)
- ME8512 - TE - AU Practical Students Individual QuestionDocumento4 pagineME8512 - TE - AU Practical Students Individual Questionsikkandar faizNessuna valutazione finora
- Fluid Mechanics Lab ManualDocumento43 pagineFluid Mechanics Lab ManualbensonNessuna valutazione finora
- ME8651qb Design of Transmission SystemsDocumento18 pagineME8651qb Design of Transmission SystemsMURALI KRISHNAN RNessuna valutazione finora
- Unit 2 and 3 Mechanics of MachinesDocumento21 pagineUnit 2 and 3 Mechanics of MachinesYogaraja JeyarajNessuna valutazione finora
- Atd Questions and AnswersDocumento18 pagineAtd Questions and AnswersPraba Karan DNessuna valutazione finora
- DOM Airwalk Module 1 PDFDocumento34 pagineDOM Airwalk Module 1 PDFMuhammed SabeehNessuna valutazione finora
- DOM M1 Ktunotes - in - PDFDocumento34 pagineDOM M1 Ktunotes - in - PDFSarath HaridasNessuna valutazione finora
- RandomVariables PDFDocumento19 pagineRandomVariables PDFsri kiranNessuna valutazione finora
- 1rv18me113 18G5B01 5Documento1 pagina1rv18me113 18G5B01 5sri kiranNessuna valutazione finora
- Random VariablesDocumento19 pagineRandom Variablessri kiranNessuna valutazione finora
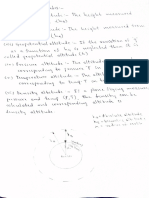
- Suore) : Tupes O AlttudesDocumento3 pagineSuore) : Tupes O Alttudessri kiranNessuna valutazione finora
- 1rv18me113 18GB501 4 PDFDocumento2 pagine1rv18me113 18GB501 4 PDFsri kiranNessuna valutazione finora
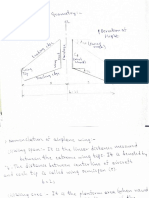
- Wing Plaudovm Qtometyy: E Susta (Documento3 pagineWing Plaudovm Qtometyy: E Susta (sri kiranNessuna valutazione finora
- 2 Itevuationa Stowdavd Atwospac o Hous: Tts WiosDocumento3 pagine2 Itevuationa Stowdavd Atwospac o Hous: Tts Wiossri kiranNessuna valutazione finora
- Course:: Esign of Machine Elements - I 18ME54Documento14 pagineCourse:: Esign of Machine Elements - I 18ME54sri kiranNessuna valutazione finora
- 3 Impact LoadingDocumento42 pagine3 Impact Loadingsri kiran100% (1)
- 1 Design Against Static LoadingDocumento142 pagine1 Design Against Static Loadingsri kiranNessuna valutazione finora
- 2 Design Against Fluctuating LoadsDocumento68 pagine2 Design Against Fluctuating Loadssri kiranNessuna valutazione finora
- Ways To Measure Public Opinion 3Documento11 pagineWays To Measure Public Opinion 3Mohamed Abd ELfattahNessuna valutazione finora
- BARAKA Modelling ProposalDocumento9 pagineBARAKA Modelling Proposalmurali.5482Nessuna valutazione finora
- Project Profile AdamaDocumento4 pagineProject Profile AdamaYohannes AlemayehuNessuna valutazione finora
- Grade 4 Social Sciences-Geography Term 2 Lesson PlansDocumento9 pagineGrade 4 Social Sciences-Geography Term 2 Lesson Plansgobedimalapile02Nessuna valutazione finora
- Lecture On Dictionaries - Jupyter NotebookDocumento13 pagineLecture On Dictionaries - Jupyter NotebookruchikaNessuna valutazione finora
- CSBA 2200, Peer Review TemplateDocumento2 pagineCSBA 2200, Peer Review TemplateAlejandro BravoNessuna valutazione finora
- QCBS RFP For Gweir SHPP PMC PDFDocumento125 pagineQCBS RFP For Gweir SHPP PMC PDFjayant pathakNessuna valutazione finora
- Government Polytechnic, Pune: ET2107 - NODocumento8 pagineGovernment Polytechnic, Pune: ET2107 - NOG012 Bhise AniketNessuna valutazione finora
- Letter B Lesson PlanDocumento3 pagineLetter B Lesson Planapi-300212612100% (1)
- 2014 04 14 Veterinary Instrumentation Presented The Simon Award 2014 For Outstanding Contribution in The Field of Veterinary Surgery To Michael Guilliard MA, VetMB, CertSAO, FRCVSDocumento2 pagine2014 04 14 Veterinary Instrumentation Presented The Simon Award 2014 For Outstanding Contribution in The Field of Veterinary Surgery To Michael Guilliard MA, VetMB, CertSAO, FRCVSHenry ScheinNessuna valutazione finora
- H-330 Field Installation Manual IndexDocumento11 pagineH-330 Field Installation Manual IndexRamon JimenezNessuna valutazione finora
- Conductivity Type of Extrinsic Semiconducting Materials: Standard Test Methods ForDocumento6 pagineConductivity Type of Extrinsic Semiconducting Materials: Standard Test Methods ForRob GridleyNessuna valutazione finora
- University of Tehran Faculty of New Science & Technology Master's Thesis Proposal DefenseDocumento46 pagineUniversity of Tehran Faculty of New Science & Technology Master's Thesis Proposal DefenseSoheilDarvishMotavalliNessuna valutazione finora
- Entire Environmental Quality - DesignDocumento374 pagineEntire Environmental Quality - DesignLTE002Nessuna valutazione finora
- AWS Certified Developer - AssociateDocumento2 pagineAWS Certified Developer - AssociateKS ReddyNessuna valutazione finora
- Business Ethics PDFDocumento16 pagineBusiness Ethics PDFRitika DiwakarNessuna valutazione finora
- Public Servants and Government ServantsDocumento10 paginePublic Servants and Government Servantsalexandra angelinaNessuna valutazione finora
- Karma: "Dove La Legge Della Grazia È Attiva, Finisce La Legge Del Karma"Documento37 pagineKarma: "Dove La Legge Della Grazia È Attiva, Finisce La Legge Del Karma"Lars JensenNessuna valutazione finora
- Omb ValvesDocumento52 pagineOmb ValvesCesar SotoNessuna valutazione finora
- 2020 AMC Years 7-8 JuniorDocumento8 pagine2020 AMC Years 7-8 JuniorTodor DobrevNessuna valutazione finora
- FNDWRR PDFDocumento5 pagineFNDWRR PDFngole ngoleNessuna valutazione finora
- TAPCON® 240: Voltage Regulator For Regulating TransformersDocumento6 pagineTAPCON® 240: Voltage Regulator For Regulating TransformerscastrojpNessuna valutazione finora
- GX30G Non EU (150113) - ??Documento2 pagineGX30G Non EU (150113) - ??ggpetNessuna valutazione finora
- Chapter 6 QuizDocumento8 pagineChapter 6 QuizWael AyariNessuna valutazione finora
- LAtihan Ujian Inggris MinatDocumento13 pagineLAtihan Ujian Inggris MinatDfzh HhNessuna valutazione finora