Potrebbero piacerti anche
- Matlab Sinais ComunicaçãoDocumento7 pagineMatlab Sinais ComunicaçãoVagner FafetineNessuna valutazione finora
- Quimica Manual 2007Documento218 pagineQuimica Manual 2007Vagner Fafetine100% (5)
- SC-I - AP4 - Descrição de Sinais Aperiódicos No Domínio Da FrequênciaDocumento2 pagineSC-I - AP4 - Descrição de Sinais Aperiódicos No Domínio Da FrequênciaVagner FafetineNessuna valutazione finora
- Documento Sem NomeDocumento4 pagineDocumento Sem NomeVagner FafetineNessuna valutazione finora
- Usergate Maquina PortãoDocumento1 paginaUsergate Maquina PortãoVagner FafetineNessuna valutazione finora
- Contextualização histórica da filosofia grega clássicaDocumento9 pagineContextualização histórica da filosofia grega clássicaVagner Fafetine82% (11)
- GMT20220404-151533 RecordingDocumento1 paginaGMT20220404-151533 RecordingVagner FafetineNessuna valutazione finora
- Trabalho - Histórica Da FilosofiaDocumento8 pagineTrabalho - Histórica Da FilosofiaVagner FafetineNessuna valutazione finora
- Numeral SystemDocumento4 pagineNumeral SystemVagner FafetineNessuna valutazione finora
- Motor de PesquisaDocumento11 pagineMotor de PesquisaVagner FafetineNessuna valutazione finora
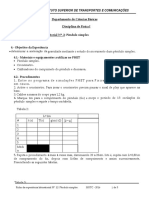
- Péndulo SimplesDocumento3 paginePéndulo SimplesVagner FafetineNessuna valutazione finora
- Custos de armazenamento e tempo de crawling em sistemas de buscaDocumento1 paginaCustos de armazenamento e tempo de crawling em sistemas de buscaVagner FafetineNessuna valutazione finora
- Coleção de projetos matemáticos e musicaisDocumento34 pagineColeção de projetos matemáticos e musicaisRodrigo Lucius Derzié LuzNessuna valutazione finora
- Edital #500 - Ebserh - Áreas - Administrativa e Assistencial de 25 de Janeiro de 2021.Documento1 paginaEdital #500 - Ebserh - Áreas - Administrativa e Assistencial de 25 de Janeiro de 2021.Francisco ArthurNessuna valutazione finora
- Intervention Ideas For Abandoned Urban AreasDocumento185 pagineIntervention Ideas For Abandoned Urban AreasCristina Soares CavacoNessuna valutazione finora
- Tecnologia 9ºBDocumento2 pagineTecnologia 9ºBAline DouradoNessuna valutazione finora
- Aulas de Português e Matemática do 7o anoDocumento12 pagineAulas de Português e Matemática do 7o anoIsaac Cristian Machado da costaNessuna valutazione finora
- OLIVEIRA Marilda - Como Produzir Claroes Nas Pesquisas em EducacaoDocumento13 pagineOLIVEIRA Marilda - Como Produzir Claroes Nas Pesquisas em EducacaopedernestoNessuna valutazione finora
- TESE de Doutorado - Ivson SilvaDocumento313 pagineTESE de Doutorado - Ivson SilvaSilva1984Nessuna valutazione finora
- 2 - Plano de Curso Educação PsicomotoraDocumento7 pagine2 - Plano de Curso Educação PsicomotoraGi AnneNessuna valutazione finora
- A importância da leitura críticaDocumento6 pagineA importância da leitura críticaJan R. GuerraNessuna valutazione finora
- Vestibulares: Equação do segundo grauDocumento4 pagineVestibulares: Equação do segundo grauEduarda TenórioNessuna valutazione finora
- Programa de Introdução À SociologiaDocumento2 paginePrograma de Introdução À SociologiaYthalloNessuna valutazione finora
- O PIRULITO DO PATODocumento13 pagineO PIRULITO DO PATOArlete Rodrigues100% (1)
- Atividades: Pesquisa de MercadoDocumento15 pagineAtividades: Pesquisa de MercadoEllen Cristina VierNessuna valutazione finora
- As Baianas como ícone de nacionalidade brasileiraDocumento30 pagineAs Baianas como ícone de nacionalidade brasileiraDuda BorgesNessuna valutazione finora
- Los Hechos en El Derecho Uruguayo. Consideraciones Iniciales Sobre La Quaesto Facti en El Derecho UruguayoDocumento20 pagineLos Hechos en El Derecho Uruguayo. Consideraciones Iniciales Sobre La Quaesto Facti en El Derecho UruguayoHoracio Ulises Rau FariasNessuna valutazione finora
- Reformas do ensino profissional na Escola Normal de Artes e Ofícios Wenceslau Braz de 1927 a 1935Documento2 pagineReformas do ensino profissional na Escola Normal de Artes e Ofícios Wenceslau Braz de 1927 a 1935Paulo Roberto Castor100% (1)
- Caca Palavras - Vida RealDocumento1 paginaCaca Palavras - Vida RealColégio Estadual Geovania Nogueira NunesNessuna valutazione finora
- Plano de Ensino Anual - 1º Reg 1 Ano Ensino MédioDocumento7 paginePlano de Ensino Anual - 1º Reg 1 Ano Ensino Médiotiago RochaNessuna valutazione finora
- Englishandmore6 MP G20Documento244 pagineEnglishandmore6 MP G20Happy English Time100% (4)
- Dificuldades De: AprendizagemDocumento10 pagineDificuldades De: AprendizagemJanny Ricardo CamposNessuna valutazione finora
- Formação profissional na Clínica Dentária de Santa MadalenaDocumento19 pagineFormação profissional na Clínica Dentária de Santa MadalenaAlexandra AlvesNessuna valutazione finora
- Pôr-do-Sol nas Artes evento na Casa das ArtesDocumento8 paginePôr-do-Sol nas Artes evento na Casa das ArtesJmallNessuna valutazione finora
- Investigando Uma Escola Pública em Niterói-RJ: Histórias Da Escola e Vozes Das Crianças de 6 Anos.Documento210 pagineInvestigando Uma Escola Pública em Niterói-RJ: Histórias Da Escola e Vozes Das Crianças de 6 Anos.Silvano RsfsNessuna valutazione finora
- 5° Ano, Anos IniciaisDocumento38 pagine5° Ano, Anos IniciaisJussara BarbosaNessuna valutazione finora
- Resumos dos textos de história do direito abordam o direito romano e medievalDocumento18 pagineResumos dos textos de história do direito abordam o direito romano e medievalAnderson DuqueNessuna valutazione finora
- Aula 08 - Atividade Revisão Da TentativaDocumento1 paginaAula 08 - Atividade Revisão Da TentativaPedro Fernandes KayashikoNessuna valutazione finora
- Gabriel Cousens - Nutrição Evolutiva - AlimentaçãoDocumento2 pagineGabriel Cousens - Nutrição Evolutiva - AlimentaçãoAbsentia Belli67% (3)
- A Fabricação Da Loucura Na Infância, Por Michele KamersDocumento2 pagineA Fabricação Da Loucura Na Infância, Por Michele KamersPsicossomática Psicanalítica I. Sedes SapientiaeNessuna valutazione finora
- 7ano_CCSA_LI_est_webDocumento108 pagine7ano_CCSA_LI_est_webprofessoraandrealobatoNessuna valutazione finora
- Orientação Interna Dirben 172Documento103 pagineOrientação Interna Dirben 172jimmyspenglerNessuna valutazione finora