Potrebbero piacerti anche
- Manuale Catia v5 r14 Solidi - ITADocumento727 pagineManuale Catia v5 r14 Solidi - ITAMarcello Coppola75% (4)
- La Fisica Di Feynman 2 Cosa Sono I CampiDocumento2 pagineLa Fisica Di Feynman 2 Cosa Sono I Campiawertu567Nessuna valutazione finora
- Appunti Scienza Dei MaterialiDocumento13 pagineAppunti Scienza Dei MaterialialbertoNessuna valutazione finora
- FEM Intro ANSYS PDFDocumento66 pagineFEM Intro ANSYS PDFAndrea AmistàNessuna valutazione finora
- (Buoni) Sbobine FompiDocumento225 pagine(Buoni) Sbobine Fompigiu100% (1)
- CDM UNINA Lecture1Documento60 pagineCDM UNINA Lecture1CarloLucianiNessuna valutazione finora
- L02 03 AlberiDocumento47 pagineL02 03 AlberiLuis PerezNessuna valutazione finora
- Parte I - 3 L'Elemento FinitoDocumento26 pagineParte I - 3 L'Elemento FinitoMatteo OliveriNessuna valutazione finora
- Cap 5Documento10 pagineCap 5davideNessuna valutazione finora
- 0 2016 01 25 SDC Esame ScrittoDocumento5 pagine0 2016 01 25 SDC Esame Scrittoandrea.alberici1601Nessuna valutazione finora
- Analisi Statica Di Edifici MultipianoDocumento27 pagineAnalisi Statica Di Edifici MultipianoGiuseppe SamusNessuna valutazione finora
- 06c Strutture 2010-11 Rev5.0Documento26 pagine06c Strutture 2010-11 Rev5.0Giuseppe GentileNessuna valutazione finora
- TorsioneDocumento30 pagineTorsioneIlaria IorlanoNessuna valutazione finora
- Lez 47Documento6 pagineLez 47Marino CrisNessuna valutazione finora
- Esercitazione Sap2000Documento16 pagineEsercitazione Sap2000antonello75Nessuna valutazione finora
- Lezione13 3 PDFDocumento9 pagineLezione13 3 PDFMMNessuna valutazione finora
- Torsione Nei PontiDocumento9 pagineTorsione Nei PontiIlaria IorlanoNessuna valutazione finora
- (Costruzione Di Macchine) Resistenza Meccanica e FratturaDocumento14 pagine(Costruzione Di Macchine) Resistenza Meccanica e Fratturasebarm86Nessuna valutazione finora
- Geometria Delle AreeDocumento13 pagineGeometria Delle AreeFederica MililloNessuna valutazione finora
- Alberi AVLDocumento32 pagineAlberi AVLJames JordanNessuna valutazione finora
- Interazione Fluido StrutturaDocumento25 pagineInterazione Fluido StrutturaLuca FranceschiniNessuna valutazione finora
- Strutture in Cemento Armato 2008 v1.5Documento61 pagineStrutture in Cemento Armato 2008 v1.5grandfunk46Nessuna valutazione finora
- III Esperienza - Molle 2020 2021Documento40 pagineIII Esperienza - Molle 2020 2021ForgeLionNessuna valutazione finora
- 08 - Elementi Solidi e AssialsimmetriciDocumento20 pagine08 - Elementi Solidi e AssialsimmetriciGabriele SiminoNessuna valutazione finora
- MCS 2022 Esempio Trave PianaDocumento7 pagineMCS 2022 Esempio Trave Pianamichele peraniNessuna valutazione finora
- Lez 43Documento8 pagineLez 43Francesco PreteNessuna valutazione finora
- Dispensa Scienza Delle Costruzioni PDFDocumento181 pagineDispensa Scienza Delle Costruzioni PDFTommaso SicilianoNessuna valutazione finora
- 06-Tensioni Nelle Travi V1-6Documento33 pagine06-Tensioni Nelle Travi V1-6Alessandro Riposi100% (1)
- Metodi Vincoli AusiliariDocumento14 pagineMetodi Vincoli AusiliariRobertoNessuna valutazione finora
- (Ebook - Ingegneria - Ita) Tecnica Delle Costruzioni Tecnica Delle Costruzioni AcciaioDocumento122 pagine(Ebook - Ingegneria - Ita) Tecnica Delle Costruzioni Tecnica Delle Costruzioni AcciaioLorenzo FornasariNessuna valutazione finora
- Scritto 0721 BisDocumento2 pagineScritto 0721 BisIolanda NavoneNessuna valutazione finora
- Correzione An1Mecc (A-L) 21febb18Documento6 pagineCorrezione An1Mecc (A-L) 21febb18paolettimarco71Nessuna valutazione finora
- Campi Elettromagnetici LADocumento108 pagineCampi Elettromagnetici LAIngegnere Pazzo100% (2)
- Fondazione V1.1Documento61 pagineFondazione V1.1Lorenzo CampaniniNessuna valutazione finora
- Ese06 - Ponte Estensimetrico PDFDocumento23 pagineEse06 - Ponte Estensimetrico PDFMartino LuccaNessuna valutazione finora
- Calcolo Strutturale ACCIAIODocumento24 pagineCalcolo Strutturale ACCIAIOgabrieleNessuna valutazione finora
- Appunti MetallurgiaDocumento59 pagineAppunti MetallurgiaPaul BortoloNessuna valutazione finora
- 2 Accoppiamenti CinematiciDocumento20 pagine2 Accoppiamenti Cinematici8848by7zdrNessuna valutazione finora
- Meccanica Dei Fluidi Cagliari PDFDocumento129 pagineMeccanica Dei Fluidi Cagliari PDFdomNessuna valutazione finora
- Temi Esame PDFDocumento92 pagineTemi Esame PDFFrancesca De PariNessuna valutazione finora
- Bocno-Torziono Izvijanje NosacaDocumento23 pagineBocno-Torziono Izvijanje NosacanazgulturukNessuna valutazione finora
- 05 FissioneNucleareDocumento49 pagine05 FissioneNucleareMarco SIMONENessuna valutazione finora
- Laboratorio - 20 04 2017Documento26 pagineLaboratorio - 20 04 2017lucaggNessuna valutazione finora
- Esempio Sez. Mista Cavi Post-TesiDocumento47 pagineEsempio Sez. Mista Cavi Post-TesiandreaNessuna valutazione finora
- (Ingegneria - ITA) ElettrotecnicaDocumento51 pagine(Ingegneria - ITA) ElettrotecnicaceskokrNessuna valutazione finora
- Profili Sottili - GhersiDocumento40 pagineProfili Sottili - GhersitramaspolinoNessuna valutazione finora
- Carta Di Nichols e Legami in Frequenza Tra Anello Aperto e Anello ChiusoDocumento8 pagineCarta Di Nichols e Legami in Frequenza Tra Anello Aperto e Anello ChiusosinchyNessuna valutazione finora
- 11 Elementi Superiori - V1Documento6 pagine11 Elementi Superiori - V1Stefano PellicelliNessuna valutazione finora
- 11 Taglio TorsioneDocumento19 pagine11 Taglio TorsioneSalvatore grappa100% (1)
- Giunti Trave Colonna GeneralitDocumento12 pagineGiunti Trave Colonna GeneralitMatteo MessinaNessuna valutazione finora
- Lezione18 ImbozzamentoDocumento17 pagineLezione18 ImbozzamentocapspugnaNessuna valutazione finora
- Capitolo 03 TaglioDocumento15 pagineCapitolo 03 Tagliofanta calcioNessuna valutazione finora
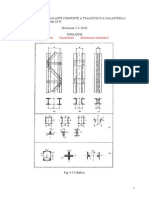
- Lezione16 Aste ComposteDocumento18 pagineLezione16 Aste ComposteAndreaMercuriNessuna valutazione finora
- Acciaio 6 3Documento44 pagineAcciaio 6 3Alessandro CamozzatoNessuna valutazione finora
- (Ebook - Ing - Ita) Scienza Delle Costruzioni - Quesiti Con Risposte (230 Pag)Documento230 pagine(Ebook - Ing - Ita) Scienza Delle Costruzioni - Quesiti Con Risposte (230 Pag)Stefano VintoNessuna valutazione finora
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateDa EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateNessuna valutazione finora
- Esercizi di matematica: studio di funzioni a variabile realeDa EverandEsercizi di matematica: studio di funzioni a variabile realeNessuna valutazione finora
- Senza TitoloDocumento14 pagineSenza TitologiuNessuna valutazione finora
- Requisiti Funzionali Per Il ClienteDocumento4 pagineRequisiti Funzionali Per Il ClientegiuNessuna valutazione finora
- Riassunto PDFDocumento484 pagineRiassunto PDFgiuNessuna valutazione finora
- MKT 09-11Documento25 pagineMKT 09-11giuNessuna valutazione finora
- 6 - Fompi 2010-11 AhpDocumento70 pagine6 - Fompi 2010-11 AhpgiuNessuna valutazione finora
- Sviluppo ProdottoDocumento111 pagineSviluppo ProdottogiuNessuna valutazione finora
- Il Problema Della ProgettazioneDocumento59 pagineIl Problema Della ProgettazionegiuNessuna valutazione finora
- MKT 06-02Documento16 pagineMKT 06-02giuNessuna valutazione finora
- Matrice Delle ContraddizioniDocumento14 pagineMatrice Delle ContraddizionigiuNessuna valutazione finora
- Appunti Esercitazioni Guida Ansys 12Documento294 pagineAppunti Esercitazioni Guida Ansys 12Emanuele ButtàNessuna valutazione finora
- TRIZDocumento30 pagineTRIZBrunoRizzoNessuna valutazione finora
- Requisiti Funzionali Per Il ClienteDocumento4 pagineRequisiti Funzionali Per Il ClientegiuNessuna valutazione finora
- 667-Article Text-2573-1-10-20130703 PDFDocumento8 pagine667-Article Text-2573-1-10-20130703 PDFgiuNessuna valutazione finora
- Appunti Esercitazioni Guida Ansys 12Documento294 pagineAppunti Esercitazioni Guida Ansys 12Emanuele ButtàNessuna valutazione finora
- Pi 2020 005 Int050-052Documento4 paginePi 2020 005 Int050-052giuNessuna valutazione finora
- CPM9 Mecc PDFDocumento60 pagineCPM9 Mecc PDFgiuNessuna valutazione finora
- CPM9 Mecc PDFDocumento60 pagineCPM9 Mecc PDFgiuNessuna valutazione finora
- Esame 200728 Traccia2Documento1 paginaEsame 200728 Traccia2giuNessuna valutazione finora
- Capitolo 03 TaglioDocumento22 pagineCapitolo 03 Tagliomdichiara8236Nessuna valutazione finora
- Risoluzione Numerica Eq LaplaceDocumento17 pagineRisoluzione Numerica Eq LaplacegiuNessuna valutazione finora
- Risoluzione Numerica Eq LaplaceDocumento17 pagineRisoluzione Numerica Eq LaplacegiuNessuna valutazione finora
- Equazioni Di Navier-StokesDocumento6 pagineEquazioni Di Navier-StokesgabriPVNessuna valutazione finora
- Dispense GeometriaDocumento16 pagineDispense GeometriabeniNessuna valutazione finora
- Storia Della Musica AmericanaDocumento148 pagineStoria Della Musica AmericanaantoniosainaNessuna valutazione finora
- Compendio Alla GnosiDocumento111 pagineCompendio Alla GnosigloriaNessuna valutazione finora
- Berkeley e Mach Contro Lo Spazio AssolutoDocumento3 pagineBerkeley e Mach Contro Lo Spazio AssolutoEsonet.orgNessuna valutazione finora
- Leban-FdP2018 FlessioneDocumento30 pagineLeban-FdP2018 FlessioneSteel_catNessuna valutazione finora
- Esercizi - I VettoriDocumento10 pagineEsercizi - I Vettorivin_hiworldNessuna valutazione finora
- Significato Geometrico Di DerivataDocumento4 pagineSignificato Geometrico Di DerivataAnna VellucciNessuna valutazione finora
- Camillo Berti Note Sulla TopografiaDocumento368 pagineCamillo Berti Note Sulla TopografiaPalumbo MichaelNessuna valutazione finora
- Esercitazione 4Documento9 pagineEsercitazione 4LeonardoNessuna valutazione finora
- 01 Spazi VettorialiDocumento10 pagine01 Spazi VettorialiFrancesco VaroneNessuna valutazione finora
- Antipolo RettaDocumento9 pagineAntipolo RettaHULIOSMELLANessuna valutazione finora
- Trasformazioni DatumDocumento13 pagineTrasformazioni DatumAndrea MackoNessuna valutazione finora
- Teofilo. Scemenze. Io Posso Dirti Che Cosa Suscita in Me La Gioconda. Aletofilo. E A Me Non Interessa Per Niente, in Questo ContestoDocumento13 pagineTeofilo. Scemenze. Io Posso Dirti Che Cosa Suscita in Me La Gioconda. Aletofilo. E A Me Non Interessa Per Niente, in Questo ContestoFrancesco SorceNessuna valutazione finora
- E. Spinazzola DefinitivoDocumento6 pagineE. Spinazzola DefinitivosimoroncoNessuna valutazione finora
- Il Tempo Eterno Di DioDocumento58 pagineIl Tempo Eterno Di DioLuca Dal SantoNessuna valutazione finora
- Il Potere Di Adesso SintesiDocumento8 pagineIl Potere Di Adesso SintesiAntonio VaccarelloNessuna valutazione finora
- Le Corbusier - "Avanguardia Della Tradizione"Documento15 pagineLe Corbusier - "Avanguardia Della Tradizione"Francesco BagnoliNessuna valutazione finora