Potrebbero piacerti anche
- Safety Module MEU01 MRCDocumento14 pagineSafety Module MEU01 MRCTran LeNessuna valutazione finora
- Alarm and Error Codes For MRCDocumento78 pagineAlarm and Error Codes For MRCeleceng197950% (4)
- MRC K60 Service ManualDocumento44 pagineMRC K60 Service ManualTran Le100% (1)
- Trouble Shooting Manual For MRCDocumento154 pagineTrouble Shooting Manual For MRCdollare100% (1)
- Motoman Advanced Robot Visual Interface Visual DCI User ManualDocumento62 pagineMotoman Advanced Robot Visual Interface Visual DCI User ManualsunhuynhNessuna valutazione finora
- Trouble ShootingMRCDocumento153 pagineTrouble ShootingMRCCarlos Alberto Oliveira100% (1)
- LaderEditor XRCDocumento94 pagineLaderEditor XRCrguzmanabundisNessuna valutazione finora
- 147324-1 MotoCom SDK Functon ManualDocumento217 pagine147324-1 MotoCom SDK Functon Manualrubi monNessuna valutazione finora
- Motoman ManualDocumento16 pagineMotoman ManualvalentincaciorNessuna valutazione finora
- Maintenance Manual Alarm - Error List: Motoman XRCDocumento86 pagineMaintenance Manual Alarm - Error List: Motoman XRCOscar SaucedoNessuna valutazione finora
- MRC IO StructureDocumento53 pagineMRC IO Structureeleceng1979Nessuna valutazione finora
- Motoman XRC Concurrent IO and Parameter ManualDocumento340 pagineMotoman XRC Concurrent IO and Parameter ManualsunhuynhNessuna valutazione finora
- Floppy Disk Emulator For Windows User's Manual: ERC, MRC, and XRC ControllerDocumento68 pagineFloppy Disk Emulator For Windows User's Manual: ERC, MRC, and XRC ControllerRodrigoNessuna valutazione finora
- SK6 Dual PDFDocumento204 pagineSK6 Dual PDFjuan carlos100% (1)
- XRC Controller PMT Fuction ManualDocumento28 pagineXRC Controller PMT Fuction ManualsunhuynhNessuna valutazione finora
- Yaskawa CACR-IR Series ManualDocumento113 pagineYaskawa CACR-IR Series ManualsunhuynhNessuna valutazione finora
- RelativeJob PDFDocumento64 pagineRelativeJob PDFjuan carlosNessuna valutazione finora
- Yasnac MRC Alarm and Error CodeDocumento80 pagineYasnac MRC Alarm and Error Codesunhuynh100% (2)
- XRC T EndlessDocumento38 pagineXRC T EndlessAlex GorNessuna valutazione finora
- Motoman K6SB - Service ManualDocumento47 pagineMotoman K6SB - Service ManualTran LeNessuna valutazione finora
- Muratec C2280 C2880 C3680 Service ManualDocumento1.201 pagineMuratec C2280 C2880 C3680 Service ManualJake Johnson100% (1)
- Maintenance Manual: Yasnac MRCDocumento147 pagineMaintenance Manual: Yasnac MRCKevin ScogginsNessuna valutazione finora
- %Qo#Te (Wpevkqp +Puvtwevkqp/Cpwcn: /Qvqocp:4%%QpvtqnngtDocumento80 pagine%Qo#Te (Wpevkqp +Puvtwevkqp/Cpwcn: /Qvqocp:4%%QpvtqnngtAriel BritoNessuna valutazione finora
- Ma1900 DX100Documento79 pagineMa1900 DX100rguzmanabundis100% (2)
- ElementaryDiagramUP20 (NAS) 0 EDocumento27 pagineElementaryDiagramUP20 (NAS) 0 EJosé Carlos MenesesNessuna valutazione finora
- 1429751Documento42 pagine1429751Ariel BritoNessuna valutazione finora
- 65142E04Documento316 pagine65142E04ccqyugaoNessuna valutazione finora
- VMC Maintenance Manual (Alarm) : (Mynx 6500/)Documento156 pagineVMC Maintenance Manual (Alarm) : (Mynx 6500/)Sagar HankareNessuna valutazione finora
- Motoman MRC TroubleshootingDocumento153 pagineMotoman MRC Troubleshootingnestor gonzalez de leon100% (1)
- Note Date: 10-01-2011 Sub: Baruffaldi Make Servo Amplifier & Motor, Qty: 2 Set Ref: WO NO.: 7REC235 Customer: Ordnance Factory, Kanpur (OFC)Documento2 pagineNote Date: 10-01-2011 Sub: Baruffaldi Make Servo Amplifier & Motor, Qty: 2 Set Ref: WO NO.: 7REC235 Customer: Ordnance Factory, Kanpur (OFC)Baldev Singh0% (2)
- Yasnac Motoman Robot Manual PDFDocumento375 pagineYasnac Motoman Robot Manual PDFchidambaram kasi100% (5)
- nx100 ControlerDocumento442 paginenx100 ControlerArūnas TalvaševičiusNessuna valutazione finora
- Ethernet I/F Board Instruction Manual: Motoman XRC ControllerDocumento44 pagineEthernet I/F Board Instruction Manual: Motoman XRC ControllerHuy BùiNessuna valutazione finora
- NX100 Controller ManualDocumento405 pagineNX100 Controller ManualErik Acosta100% (2)
- FANUC Series 0 / 00: Remote BufferDocumento79 pagineFANUC Series 0 / 00: Remote BufferMetalurgica VISILUNessuna valutazione finora
- 65160e PDFDocumento419 pagine65160e PDFavalente112100% (1)
- Gfke 0218a en - 050120Documento229 pagineGfke 0218a en - 050120giuseppe abatiNessuna valutazione finora
- Instructions: MOTOMAN-MA1400Documento75 pagineInstructions: MOTOMAN-MA1400Rajnish KumarNessuna valutazione finora
- Operator'S Manual: Fanuc Devicenet BoardDocumento124 pagineOperator'S Manual: Fanuc Devicenet BoardDiego Amador100% (1)
- Interface Rob 4000-5000Documento34 pagineInterface Rob 4000-5000Bruno GuedesNessuna valutazione finora
- B-75114en 04Documento210 pagineB-75114en 04akshay pawarNessuna valutazione finora
- Specifications: FANUC Series 16/18-MB/TB/MC/TC FANUC Series 16Documento15 pagineSpecifications: FANUC Series 16/18-MB/TB/MC/TC FANUC Series 16avalente112Nessuna valutazione finora
- fanuc NCB00T32.exe的操作手册Documento12 paginefanuc NCB00T32.exe的操作手册中国心Nessuna valutazione finora
- Fanuc Fanuc Fanuc Fanuc Fanuc: Series 16 Series 18 Series 20 Series 21 Series 0Documento612 pagineFanuc Fanuc Fanuc Fanuc Fanuc: Series 16 Series 18 Series 20 Series 21 Series 0CLAUDIONessuna valutazione finora
- Okuma Howa Spindle Drive AlarmsDocumento3 pagineOkuma Howa Spindle Drive AlarmsAnonymous wBxc1VGtNessuna valutazione finora
- XRC Controller Data Transmission Fuction ManualDocumento118 pagineXRC Controller Data Transmission Fuction ManualsunhuynhNessuna valutazione finora
- Fanuc 11m PDFDocumento2 pagineFanuc 11m PDFStevenNessuna valutazione finora
- R-J3iC Robot Link User ManualDocumento88 pagineR-J3iC Robot Link User ManualSebautomatisme0% (1)
- Osacom 8700 Teaching (1l4000c-9)Documento430 pagineOsacom 8700 Teaching (1l4000c-9)pabs260467% (3)
- FANUC IO Model-A Connection Maintenance Manual (B-61813EN - 05)Documento212 pagineFANUC IO Model-A Connection Maintenance Manual (B-61813EN - 05)Krzysztof SawickiNessuna valutazione finora
- F400 Instruction Manual PDFDocumento414 pagineF400 Instruction Manual PDFДТМ-Інжиніринг. Вестати з ЧПК, Південна КореяNessuna valutazione finora
- Operator's Manual For Arc Welding: Motoman XRC 2001 ControllerDocumento436 pagineOperator's Manual For Arc Welding: Motoman XRC 2001 ControllerAnonymous oTrMzaNessuna valutazione finora
- File - 20210920 - 111340 - G7 YasnacDocumento1 paginaFile - 20210920 - 111340 - G7 YasnacPhong HuynhNessuna valutazione finora
- Operação M64Documento347 pagineOperação M64Luciano MalheiroNessuna valutazione finora
- GE Fanuc 18i Wiring DiagramDocumento40 pagineGE Fanuc 18i Wiring Diagramapi-3771584100% (2)
- MIC2920A/29201/29202/29204: Features General DescriptionDocumento9 pagineMIC2920A/29201/29202/29204: Features General DescriptionSenen ArchilaNessuna valutazione finora
- Data Sheet: 3-Wire Disconnector Drive Control ModuleDocumento12 pagineData Sheet: 3-Wire Disconnector Drive Control ModuleConstantin NinovNessuna valutazione finora
- LM193, LM2903, LM293, LM393: LM193/LM293/LM393/LM2903 Low Power Low Offset Voltage Dual ComparatorsDocumento17 pagineLM193, LM2903, LM293, LM393: LM193/LM293/LM393/LM2903 Low Power Low Offset Voltage Dual ComparatorsElton Da Silva FariasNessuna valutazione finora
- M-Code Upgrade OptionDocumento5 pagineM-Code Upgrade OptionJulio GarciaNessuna valutazione finora
- Jameco Part Number 901191: Distributed byDocumento16 pagineJameco Part Number 901191: Distributed byHAITHAMNessuna valutazione finora
- KX T7730 Manual PDFDocumento16 pagineKX T7730 Manual PDFpatramaleNessuna valutazione finora
- KG316T Time Switch ManualDocumento4 pagineKG316T Time Switch ManualAbdu SobhyNessuna valutazione finora
- Panasonic KX-TA1232 User ManualDocumento16 paginePanasonic KX-TA1232 User ManualsunhuynhNessuna valutazione finora
- Pipe Dimensions Chart Rev Jan 2012Documento1 paginaPipe Dimensions Chart Rev Jan 2012snake13Nessuna valutazione finora
- Panasonic KX-TA624 User ManualDocumento16 paginePanasonic KX-TA624 User ManualsunhuynhNessuna valutazione finora
- Tioga Pipe ChartDocumento2 pagineTioga Pipe ChartMahmoud GaberNessuna valutazione finora
- Bao Ve Role Va Tu Dong Hoa He Thong DienDocumento329 pagineBao Ve Role Va Tu Dong Hoa He Thong Dienth037100% (3)
- Panasonic KX-TA624 Installation ManualDocumento12 paginePanasonic KX-TA624 Installation Manualsunhuynh100% (1)
- Panasonic KX t7730 KX t7730 BDocumento35 paginePanasonic KX t7730 KX t7730 BKusnadiNessuna valutazione finora
- Leadshine EL5 User ManualDocumento97 pagineLeadshine EL5 User ManualsunhuynhNessuna valutazione finora
- Hardware Manual of The Easy Servo Drives: ES-DH SeriesDocumento28 pagineHardware Manual of The Easy Servo Drives: ES-DH SeriesgrekNessuna valutazione finora
- User Manual DNC One 2015Documento30 pagineUser Manual DNC One 2015Dima TrushkinNessuna valutazione finora
- KX-TEA308 User ManualDocumento172 pagineKX-TEA308 User ManualsunhuynhNessuna valutazione finora
- Section 07Documento42 pagineSection 07christos1157Nessuna valutazione finora
- Gk247a A-008Documento35 pagineGk247a A-008WidiMufantoNessuna valutazione finora
- Hitachi Seiki VS50 60 Operating ManualDocumento139 pagineHitachi Seiki VS50 60 Operating Manualsunhuynh100% (1)
- LY Relay DatasheetDocumento13 pagineLY Relay DatasheetYahyaPaisalNessuna valutazione finora
- PG Type Cable Gland: Code No Cable Range (MM) Thread O.D. D1 (MM) Thread Length L1 (MM) Spanner Size (MM) Packing PCS/BagDocumento2 paginePG Type Cable Gland: Code No Cable Range (MM) Thread O.D. D1 (MM) Thread Length L1 (MM) Spanner Size (MM) Packing PCS/BagLucky ChauhanNessuna valutazione finora
- MIG100J6CSB1W SEMICONDUCTION DatasheetDocumento10 pagineMIG100J6CSB1W SEMICONDUCTION DatasheetsunhuynhNessuna valutazione finora
- HDSD KboneDocumento8 pagineHDSD KbonesunhuynhNessuna valutazione finora
- Solenoid ValveDocumento16 pagineSolenoid ValvesunhuynhNessuna valutazione finora
- A-Ryung: Pump For All, All For PumpDocumento52 pagineA-Ryung: Pump For All, All For PumpLia LailaNessuna valutazione finora
- D D D D D D: Description/ordering InformationDocumento22 pagineD D D D D D: Description/ordering InformationsunhuynhNessuna valutazione finora
- Mazak Fusion 640 Series How To Create A Backup Using RS232Documento5 pagineMazak Fusion 640 Series How To Create A Backup Using RS232sunhuynh100% (2)
- Ckd-Filter w1000 SeriesDocumento5 pagineCkd-Filter w1000 SeriessunhuynhNessuna valutazione finora
- MR Series Rectangular ConnectorsDocumento69 pagineMR Series Rectangular ConnectorssunhuynhNessuna valutazione finora
- DAC80 CB1 V DatasheetDocumento10 pagineDAC80 CB1 V DatasheetsunhuynhNessuna valutazione finora
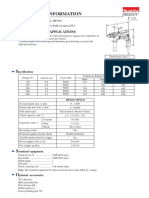
- Drill 6411 6412 6413 M611 Technical InformationDocumento12 pagineDrill 6411 6412 6413 M611 Technical InformationsunhuynhNessuna valutazione finora
- Hammer Drill HP1631-HP1630 Instruction ManualDocumento24 pagineHammer Drill HP1631-HP1630 Instruction ManualsunhuynhNessuna valutazione finora
- Echnical Information: Oncept and Main ApplicationsDocumento6 pagineEchnical Information: Oncept and Main ApplicationsKakoy Lagusan EcobenNessuna valutazione finora
- Deepak ResumeDocumento3 pagineDeepak ResumethiyaguyNessuna valutazione finora
- The Hydraulic Pumping SystemDocumento12 pagineThe Hydraulic Pumping SystemCarlos Lopez DominguezNessuna valutazione finora
- Gujarat Technological University: SUBJECT NAME: Computer Aided Manufacturing SUBJECT CODE: 2171903 BE Semester VIIDocumento4 pagineGujarat Technological University: SUBJECT NAME: Computer Aided Manufacturing SUBJECT CODE: 2171903 BE Semester VIIKrupal VithlaniNessuna valutazione finora
- Mit PDFDocumento113 pagineMit PDFAnonymous WXJTn0Nessuna valutazione finora
- Astm f1554Documento3 pagineAstm f1554ingsabrinaNessuna valutazione finora
- Acct Statement XX6669 23062023Documento66 pagineAcct Statement XX6669 23062023Suraj KoratkarNessuna valutazione finora
- PTRegistrationForm 01 02 2022 - 11 53Documento3 paginePTRegistrationForm 01 02 2022 - 11 53Shiv PandeyNessuna valutazione finora
- Flow Regimes - InflowDocumento13 pagineFlow Regimes - InflowAliNessuna valutazione finora
- Move All Database Objects From One Tablespace To AnotherDocumento2 pagineMove All Database Objects From One Tablespace To AnotherJabras GuppiesNessuna valutazione finora
- How Bangalore Gets ElectricityDocumento1 paginaHow Bangalore Gets ElectricityNabeel AhmedNessuna valutazione finora
- Compair Fluid Force 4000 IndonesiaDocumento3 pagineCompair Fluid Force 4000 Indonesiaindolube75% (4)
- Plastic, Rubber & Recycling IndustryDocumento7 paginePlastic, Rubber & Recycling IndustryPassionate_to_LearnNessuna valutazione finora
- 2014 BayHelix Annual Conference Program v2Documento19 pagine2014 BayHelix Annual Conference Program v2Ulfa Yasmin ShahabNessuna valutazione finora
- Data DictionaryDocumento4 pagineData DictionaryCamille Lucelo100% (1)
- Working of Fingerprint ScannerDocumento5 pagineWorking of Fingerprint ScannerSahana BalasubramanianNessuna valutazione finora
- Proses Bisnis Otomotif: Zummayroh, S.PDDocumento26 pagineProses Bisnis Otomotif: Zummayroh, S.PDHannyka FebrianoNessuna valutazione finora
- MS150093 01e PDFDocumento181 pagineMS150093 01e PDFAntonio MartinNessuna valutazione finora
- AE1222-Workbook 2013 - Problems and SolutionsDocumento69 pagineAE1222-Workbook 2013 - Problems and SolutionsMukmelNessuna valutazione finora
- Self Priming Water Lifting Booster PumpDocumento2 pagineSelf Priming Water Lifting Booster PumpzhelipumpNessuna valutazione finora
- Tower Crane Reference ManualDocumento73 pagineTower Crane Reference ManualVazmeque de'Hitcher100% (9)
- IT418 - C# Programming Project: Lottery Number GeneratorDocumento41 pagineIT418 - C# Programming Project: Lottery Number GeneratorCarmenLim07100% (5)
- Roadworthiness Requirements: Vehicle Standards InformationDocumento10 pagineRoadworthiness Requirements: Vehicle Standards Informationstallie001Nessuna valutazione finora
- Food Defense Self-Assessment FormDocumento4 pagineFood Defense Self-Assessment FormLynn GeiseNessuna valutazione finora
- Integrated Project ManagProject - Management - in - SAPement in SAP With Noveco ePMDocumento16 pagineIntegrated Project ManagProject - Management - in - SAPement in SAP With Noveco ePMLeontin LeonNessuna valutazione finora
- As 3638-1993 Test Sieving ProceduresDocumento7 pagineAs 3638-1993 Test Sieving ProceduresSAI Global - APACNessuna valutazione finora
- Application Filed by The Industry / Organization OnDocumento7 pagineApplication Filed by The Industry / Organization Onkrish659Nessuna valutazione finora
- Fpga Viva QuestionDocumento4 pagineFpga Viva QuestionManila MathurNessuna valutazione finora
- Devi Ever Diy Info Manual, Aw Heck YesDocumento20 pagineDevi Ever Diy Info Manual, Aw Heck YesRiley Smith75% (4)
- Simulation Exercise Manual HandbookDocumento44 pagineSimulation Exercise Manual HandbookMayte Gz100% (1)
- Final Report FEQ PDFDocumento69 pagineFinal Report FEQ PDFNabeel A K JadoonNessuna valutazione finora