Potrebbero piacerti anche
- Telephone Triggered SwitchesDocumento22 pagineTelephone Triggered SwitchesSuresh Shah100% (1)
- DOOR LOCK Through Telephone Using DTMF COMPLETEDDocumento39 pagineDOOR LOCK Through Telephone Using DTMF COMPLETEDKarunakar ReddyNessuna valutazione finora
- Remote Control of Electrical Appliances Using GSM Networks: Abah O. Sunday Visa M. Ibrahim Abah JoshuaDocumento8 pagineRemote Control of Electrical Appliances Using GSM Networks: Abah O. Sunday Visa M. Ibrahim Abah JoshuaIJERDNessuna valutazione finora
- HOME AUTOMATION Control System USING DTMFDocumento27 pagineHOME AUTOMATION Control System USING DTMFdixant tiwariNessuna valutazione finora
- DTMF Based Device ControlDocumento7 pagineDTMF Based Device ControlJitender ThakurNessuna valutazione finora
- Overview of ProjectDocumento14 pagineOverview of ProjectdbpalNessuna valutazione finora
- Intelligent Residential Security Alarm and Remote Control System Based On Single Chip ComputerDocumento3 pagineIntelligent Residential Security Alarm and Remote Control System Based On Single Chip ComputermadeypucNessuna valutazione finora
- Full Report On Cell Phone Based Door Opening System Using MicrocontrollerDocumento29 pagineFull Report On Cell Phone Based Door Opening System Using MicrocontrollerKavya Ajith100% (6)
- DTMF Based Home AutomationDocumento28 pagineDTMF Based Home AutomationRenjith RavikumarNessuna valutazione finora
- A2Z Control SystemDocumento4 pagineA2Z Control SystemZatin GuptaNessuna valutazione finora
- MDT01 DTMF Based Door Locking SystemDocumento3 pagineMDT01 DTMF Based Door Locking SystemMechWindNaniNessuna valutazione finora
- Mt8870 DTMF DecoderDocumento17 pagineMt8870 DTMF DecoderLawrence NgariNessuna valutazione finora
- Literature Review of DTMFDocumento4 pagineLiterature Review of DTMFRamesh Karumanchi100% (1)
- DTMF ProjectDocumento6 pagineDTMF ProjectPankaj UlgekarNessuna valutazione finora
- Home Appliance Control by MobileDocumento24 pagineHome Appliance Control by MobileKråñthï KïråñNessuna valutazione finora
- Ja-82y en mld51112-1Documento13 pagineJa-82y en mld51112-1Jo DSNessuna valutazione finora
- DTMF ControlDocumento10 pagineDTMF ControlPrateek PrakashNessuna valutazione finora
- Mobile Controlled ROBOT Using DTMF Technology - Report1Documento10 pagineMobile Controlled ROBOT Using DTMF Technology - Report1Mukesh Yadav0% (2)
- Motor Control by DTMFDocumento5 pagineMotor Control by DTMFDhiraj RathoreNessuna valutazione finora
- DTMF Using FPGADocumento16 pagineDTMF Using FPGATejas DharaniNessuna valutazione finora
- Santhu Robot 2Documento5 pagineSanthu Robot 2Eslavath SanthuNessuna valutazione finora
- Car Alert SystemDocumento64 pagineCar Alert SystemcrastoverkillNessuna valutazione finora
- SynopsisDocumento3 pagineSynopsisRudra Pratap SinghNessuna valutazione finora
- Final Project ProposalDocumento4 pagineFinal Project ProposalMlm NafaizNessuna valutazione finora
- DTMF Based Door Opening System REPORTDocumento20 pagineDTMF Based Door Opening System REPORTprashant0% (1)
- Home Appliance Control by Mobile Phone DTMF Ieee Ece Final Year ProjectDocumento15 pagineHome Appliance Control by Mobile Phone DTMF Ieee Ece Final Year ProjectRajan SoniNessuna valutazione finora
- Digitally Controlled Home Automation Project: Block DiagramDocumento3 pagineDigitally Controlled Home Automation Project: Block DiagramParth LadNessuna valutazione finora
- Device Control Using Telephone: Nagabhooshan S. ShetDocumento15 pagineDevice Control Using Telephone: Nagabhooshan S. ShetNicholas TaliNessuna valutazione finora
- GSM Based Home Automation System: National Institute of Technology SrinagarDocumento19 pagineGSM Based Home Automation System: National Institute of Technology SrinagarSubham PalNessuna valutazione finora
- Dual Tone Multiple Frequency Based Home Automation PDFDocumento3 pagineDual Tone Multiple Frequency Based Home Automation PDFMn Preet SainiNessuna valutazione finora
- Design and Development of Mobile Operated Control System For Humanoid RobotDocumento7 pagineDesign and Development of Mobile Operated Control System For Humanoid RobotchaitanyaNessuna valutazione finora
- Mini Project Report On: Home AutomationDocumento73 pagineMini Project Report On: Home AutomationTeja RaghuNessuna valutazione finora
- Controlling of Remote Robot Through Mobile Phone Using DTMF SignalDocumento12 pagineControlling of Remote Robot Through Mobile Phone Using DTMF Signalk rajendraNessuna valutazione finora
- Remote Vehicle Control Through Cell Phone Using DTMF @@@@Documento28 pagineRemote Vehicle Control Through Cell Phone Using DTMF @@@@PwNessuna valutazione finora
- Remote Vehicle Control Through Cell Phone Using DTMF @@@@Documento28 pagineRemote Vehicle Control Through Cell Phone Using DTMF @@@@PwNessuna valutazione finora
- Cellphone Controlled RobotDocumento35 pagineCellphone Controlled RobotAvni RajpalNessuna valutazione finora
- Introduction to IVRS SystemDocumento20 pagineIntroduction to IVRS SystemsukshradNessuna valutazione finora
- Cell Phone Operated Land Rover: Pranveer Singh Institute of TechnologyDocumento12 pagineCell Phone Operated Land Rover: Pranveer Singh Institute of Technologypannu9Nessuna valutazione finora
- Embedded SystemDocumento119 pagineEmbedded SystemVidushi DalelaNessuna valutazione finora
- Mobile Controlled Home Appliances Project ReportDocumento36 pagineMobile Controlled Home Appliances Project Reportvamsi krishnaNessuna valutazione finora
- Cell Phone Operated Robotic CarDocumento6 pagineCell Phone Operated Robotic Carosama mahyoubNessuna valutazione finora
- DTMF Based Home AutomationDocumento24 pagineDTMF Based Home AutomationShubh RockzzNessuna valutazione finora
- Project Report On Mobile Controlled Robot Using DTMF TechnologyDocumento11 pagineProject Report On Mobile Controlled Robot Using DTMF TechnologyKusum VermaNessuna valutazione finora
- Industrial Automation Using Mobile CommunicationDocumento3 pagineIndustrial Automation Using Mobile CommunicationNationalinstituteDsnrNessuna valutazione finora
- Ijret - Application of Dual Tone Multi Frequency Technology and Sensing in Autonomous Robotic NavigationDocumento5 pagineIjret - Application of Dual Tone Multi Frequency Technology and Sensing in Autonomous Robotic NavigationInternational Journal of Research in Engineering and TechnologyNessuna valutazione finora
- Project Report On Home Automation Using DTMFDocumento9 pagineProject Report On Home Automation Using DTMFankur_1n110% (1)
- Car Alarm Detection Device 2016Documento6 pagineCar Alarm Detection Device 2016muchiriisaac014Nessuna valutazione finora
- Coloured PrintoutDocumento7 pagineColoured PrintoutNitish AsijaNessuna valutazione finora
- Cell Phone Based DTMF Controlled Garage Door Opening SystemDocumento42 pagineCell Phone Based DTMF Controlled Garage Door Opening SystemSaravanan Viswakarma75% (8)
- GSM Based Fire Fighting RobotDocumento35 pagineGSM Based Fire Fighting RobotRaushanVijaySingh100% (1)
- DTMF 2Documento8 pagineDTMF 2Prathamesh KesarkarNessuna valutazione finora
- Mobile Controlled Home Appliances Without MicrocontrollerDocumento3 pagineMobile Controlled Home Appliances Without MicrocontrollerSaurabh MangeshkarNessuna valutazione finora
- Remote Car Control via Mobile PhoneDocumento15 pagineRemote Car Control via Mobile PhoneVincent KorieNessuna valutazione finora
- Mobile Controlled Electrical AppliancesDocumento17 pagineMobile Controlled Electrical AppliancesSmile AravindNessuna valutazione finora
- Networked Control System: Fundamentals and ApplicationsDa EverandNetworked Control System: Fundamentals and ApplicationsNessuna valutazione finora
- Home Automation: A Complete Guide to Buying, Owning and Enjoying a Home Automation SystemDa EverandHome Automation: A Complete Guide to Buying, Owning and Enjoying a Home Automation SystemValutazione: 2 su 5 stelle2/5 (2)
- Tri-band HF Beam Antenna ManualDocumento11 pagineTri-band HF Beam Antenna ManualOscar NavaNessuna valutazione finora
- Datasheet Ic Teclado La4227Documento4 pagineDatasheet Ic Teclado La4227MayKarolFuenmayorNessuna valutazione finora
- Teknik Saluran TransmisiDocumento28 pagineTeknik Saluran TransmisiDani RamdaniNessuna valutazione finora
- Application of Oscilloscope Technology in The Early 21st Century: A Systematic Literature ReviewDocumento15 pagineApplication of Oscilloscope Technology in The Early 21st Century: A Systematic Literature Reviewjudej8905Nessuna valutazione finora
- How To Set Up A Home Network RouterDocumento2 pagineHow To Set Up A Home Network RouterTosha ColemanNessuna valutazione finora
- Sensors 2Documento11 pagineSensors 2Usman AmeenNessuna valutazione finora
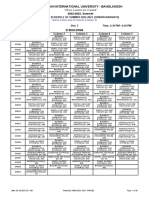
- Day 3 Slot 3 Mid Sm23 SummerDocumento32 pagineDay 3 Slot 3 Mid Sm23 SummerNayeem SarkarNessuna valutazione finora
- BETA PIPES Price List for PVC Pipes and FittingsDocumento1 paginaBETA PIPES Price List for PVC Pipes and FittingsJugno ShahNessuna valutazione finora
- DC Drives 2022 Copy UpdatedDocumento49 pagineDC Drives 2022 Copy UpdatedAzmi Shah Alias KhooNessuna valutazione finora
- Data Communications and Network FundamentalsDocumento408 pagineData Communications and Network FundamentalsKiruthika TamilselvanNessuna valutazione finora
- BSC 6600Documento11 pagineBSC 6600Naldo Baskara ArmandNessuna valutazione finora
- Part 4 Data Acquisition and Signal ProcessingDocumento56 paginePart 4 Data Acquisition and Signal ProcessingabrarNessuna valutazione finora
- MJUC ManualDocumento9 pagineMJUC ManualAjiNessuna valutazione finora
- E90-DTU (900SL22) UserManual EN v1.2Documento22 pagineE90-DTU (900SL22) UserManual EN v1.2Wasang Juwi PracihnoNessuna valutazione finora
- IR6500 v.2 Manual EnglishDocumento13 pagineIR6500 v.2 Manual EnglishJuan Carlos HerreraNessuna valutazione finora
- Auo g121sn01v4Documento27 pagineAuo g121sn01v4marneiroNessuna valutazione finora
- ATmega16(L) Microcontroller Speed, Packaging and Ordering OptionsDocumento1 paginaATmega16(L) Microcontroller Speed, Packaging and Ordering OptionsСтанислав ШевченкоNessuna valutazione finora
- SilverCrest 10in1 Remote Control ManualDocumento72 pagineSilverCrest 10in1 Remote Control ManualivanbeneNessuna valutazione finora
- YEAR 10 Self Tracking FormDocumento4 pagineYEAR 10 Self Tracking Formtimothyosaigbovo3466Nessuna valutazione finora
- Buy APC 0.6-84 (KVA-VAH) Interactive UPS Online - GeMDocumento4 pagineBuy APC 0.6-84 (KVA-VAH) Interactive UPS Online - GeMArun Chand C VNessuna valutazione finora
- itrioWF UserManual PDFDocumento22 pagineitrioWF UserManual PDFCehanNessuna valutazione finora
- 2021-APL-Optical and Electrical Characterizations of micro-LEDs Grown On Lower Defect Density Epitaxial LayersDocumento6 pagine2021-APL-Optical and Electrical Characterizations of micro-LEDs Grown On Lower Defect Density Epitaxial Layershu nanNessuna valutazione finora
- Digital Signal ProcessingDocumento20 pagineDigital Signal ProcessingAnet AugustinNessuna valutazione finora
- LM5148-Q1 80-V, Automotive, Synchronous, Buck DC/DC Controller With Ultra-Low I and Dual Random Spread SpectrumDocumento69 pagineLM5148-Q1 80-V, Automotive, Synchronous, Buck DC/DC Controller With Ultra-Low I and Dual Random Spread SpectrumAnjuNessuna valutazione finora
- 4g Lte and Ims Network Performance Management PDFDocumento3 pagine4g Lte and Ims Network Performance Management PDFAntoci MarianNessuna valutazione finora
- Thyristor Switch ApplicationsDocumento7 pagineThyristor Switch ApplicationsPathum SudasingheNessuna valutazione finora
- HV Engineering QuestionsDocumento4 pagineHV Engineering QuestionsIsradani MjNessuna valutazione finora
- Manual VC 3-5 SEDocumento22 pagineManual VC 3-5 SEAsya KunchevaNessuna valutazione finora
- Basic Monostable Radar MatlabDocumento8 pagineBasic Monostable Radar MatlabGautham KannanNessuna valutazione finora
- Windcrest Autodialler Full Remote Programming InstructionDocumento5 pagineWindcrest Autodialler Full Remote Programming InstructionChris MillsNessuna valutazione finora