Potrebbero piacerti anche
- Sailing Yacht Design: a Guide for Boat Owners, Crew and BuyersDa EverandSailing Yacht Design: a Guide for Boat Owners, Crew and BuyersNessuna valutazione finora
- Statical StabilityDocumento21 pagineStatical StabilityNeo Miala100% (2)
- Unit IDocumento24 pagineUnit IsomasundaramNessuna valutazione finora
- Initial StabilityDocumento10 pagineInitial Stabilityjonas lintagNessuna valutazione finora
- CHS July ADocumento148 pagineCHS July AGeorge PonparauNessuna valutazione finora
- CHS July ADocumento148 pagineCHS July AStaicu-Anghel ElenaNessuna valutazione finora
- Naval Architect Project ReportDocumento62 pagineNaval Architect Project Reportanuxcool100% (3)
- BilgingDocumento24 pagineBilgingsreedharsree45gmNessuna valutazione finora
- Ship Construction: Semester IIDocumento35 pagineShip Construction: Semester IIAnmol GuptaNessuna valutazione finora
- Ship's Construction PPDocumento26 pagineShip's Construction PPRabiul Islam RobinNessuna valutazione finora
- Intact BuoyancyDocumento62 pagineIntact BuoyancyGuillermo100% (1)
- Exercise For Naval Architecture 3 (Student)Documento6 pagineExercise For Naval Architecture 3 (Student)Ikhwan AzizieNessuna valutazione finora
- D Watch 2 ReportingDocumento18 pagineD Watch 2 ReportingCezar M. Barranta Jr.Nessuna valutazione finora
- 2 Plane Area of A Vessel Will Increase in Reality. The Small Angle Formula For GZ Should Only Be Used For Angles of Heel Up To About 5° or 6°Documento3 pagine2 Plane Area of A Vessel Will Increase in Reality. The Small Angle Formula For GZ Should Only Be Used For Angles of Heel Up To About 5° or 6°marvin santocildesNessuna valutazione finora
- What Is Baseline of A ShipDocumento11 pagineWhat Is Baseline of A ShipSwarg Vibha100% (1)
- Trim TutorialDocumento1 paginaTrim TutorialClaudioNessuna valutazione finora
- Tanker Rdraft and Stability Problems and AnswersDocumento4 pagineTanker Rdraft and Stability Problems and AnswersChristopherVillaltaNessuna valutazione finora
- 02.04b Ch4 PPT SlidesDocumento114 pagine02.04b Ch4 PPT Slidespothiraj100% (1)
- Calculating KB, BMDocumento16 pagineCalculating KB, BMKunal BhatiaNessuna valutazione finora
- Rule 35 - Sound Signals inDocumento31 pagineRule 35 - Sound Signals inMitch Speeder100% (1)
- Lesson 3 - Ship Stability 2Documento3 pagineLesson 3 - Ship Stability 2amirsyawal87Nessuna valutazione finora
- Stab 003Documento3 pagineStab 003Cássio Hatsumi100% (1)
- 08-NAC-Curves of Stability and Stability Criteria (160213)Documento17 pagine08-NAC-Curves of Stability and Stability Criteria (160213)G SagunaNessuna valutazione finora
- Oic Deck c13Documento51 pagineOic Deck c13Mikhail Roy Dela CruzNessuna valutazione finora
- Cargo and TrimDocumento8 pagineCargo and TrimGeorge CarinoNessuna valutazione finora
- PRC Name Questions FinalDocumento70 paginePRC Name Questions FinalDominic Villamante100% (3)
- Stability and Trim From Ian v.Documento44 pagineStability and Trim From Ian v.Trizha Dela Gente100% (1)
- Model Questions-BSc NS-Ship Stability IIIDocumento10 pagineModel Questions-BSc NS-Ship Stability IIISachin SebastianNessuna valutazione finora
- Floatation and Its Laws PDFDocumento2 pagineFloatation and Its Laws PDFtarak das0% (1)
- 01-NAC-Introduction To Ship Stability (160419)Documento40 pagine01-NAC-Introduction To Ship Stability (160419)MuhammadIlhamNugroho100% (1)
- 12-NAC-Deterministic Damage Stability (160213)Documento15 pagine12-NAC-Deterministic Damage Stability (160213)SundeepNessuna valutazione finora
- ch1 Framing SystemDocumento12 paginech1 Framing Systemموبليات حسين المصريNessuna valutazione finora
- NA Problems 1Documento3 pagineNA Problems 1siddarth amaravathi100% (1)
- Stresses and Strains in ShipsDocumento3 pagineStresses and Strains in Shipskuldeepasingh75% (4)
- F2 1-400Documento43 pagineF2 1-400Rizaldie Zambra Jr100% (1)
- Bow and SternDocumento6 pagineBow and SternsbdmanNessuna valutazione finora
- StabilityDocumento57 pagineStabilitymarkNessuna valutazione finora
- Seamanship 6 Advanced Trim Stabilitystress CELTECHDocumento128 pagineSeamanship 6 Advanced Trim Stabilitystress CELTECHasta YunoNessuna valutazione finora
- 47 5815 MT222 2015 1 1 1 Ch.6 Transverse Statical Stability-ADocumento23 pagine47 5815 MT222 2015 1 1 1 Ch.6 Transverse Statical Stability-AManoj KumarNessuna valutazione finora
- Basic StabilityDocumento63 pagineBasic StabilityVennyse Rabadon100% (2)
- Uscg Ship Construction Some QuestionsDocumento4 pagineUscg Ship Construction Some QuestionsmhrbzkrtNessuna valutazione finora
- Naval NumericalDocumento7 pagineNaval NumericalAvinash Mudrika100% (1)
- Angle of LolDocumento11 pagineAngle of LolNitinVanjariNessuna valutazione finora
- FreeboardDocumento12 pagineFreeboardRodneyNessuna valutazione finora
- B) First Trim Correction: Trim LCF Forward of Midships LCF Aft of MidshipsDocumento6 pagineB) First Trim Correction: Trim LCF Forward of Midships LCF Aft of MidshipsCezar100% (1)
- Trim and Stability - StandardDocumento41 pagineTrim and Stability - Standardwaleedyehia100% (1)
- MEO Class 4 Online Exam of Ship Construction.Documento19 pagineMEO Class 4 Online Exam of Ship Construction.Ashwani KumarNessuna valutazione finora
- Ship' ConstructionDocumento28 pagineShip' ConstructionBhayu DewantoNessuna valutazione finora
- Estimation of The Ship Resistance & Engine SelectionDocumento16 pagineEstimation of The Ship Resistance & Engine SelectionNikolas DekkoNessuna valutazione finora
- Load Line: Ship DesignDocumento89 pagineLoad Line: Ship DesignMuhammed Talha ÖzdenoğluNessuna valutazione finora
- Damage StabilityDocumento11 pagineDamage Stabilitypolaris25100% (1)
- Naval July 2023Documento45 pagineNaval July 2023Mano ShankarNessuna valutazione finora
- Stability Problems 3Documento31 pagineStability Problems 3George PonparauNessuna valutazione finora
- Intact Stability and Stability in The Damaged ConditionDocumento14 pagineIntact Stability and Stability in The Damaged Conditionhrish732Nessuna valutazione finora
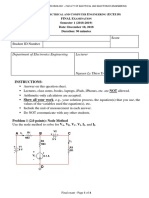
- Geometry of Ships and Ship-Shaped Deepwater Floating SystemsDocumento55 pagineGeometry of Ships and Ship-Shaped Deepwater Floating SystemsKrishnan ChockalingamNessuna valutazione finora
- Resistance PDFDocumento96 pagineResistance PDFPutra AdamNessuna valutazione finora
- Trim or Longitudinal StabilityDocumento5 pagineTrim or Longitudinal StabilityA JSprNessuna valutazione finora
- Week 5 OOW Transvers Statice StabilityDocumento18 pagineWeek 5 OOW Transvers Statice StabilityAmin Al QawasmehNessuna valutazione finora
- Introduction To TSSDocumento11 pagineIntroduction To TSSnoczviviNessuna valutazione finora
- Why Initial Met Height at 1 RadianDocumento9 pagineWhy Initial Met Height at 1 RadianRanjeet SinghNessuna valutazione finora
- Section 9 Free Surface EffectDocumento14 pagineSection 9 Free Surface EffectfaisalNessuna valutazione finora
- Section 9 Free Surface EffectDocumento14 pagineSection 9 Free Surface EffectfaisalNessuna valutazione finora
- Section 7 Conditions of StabilityDocumento4 pagineSection 7 Conditions of StabilityfaisalNessuna valutazione finora
- Section 8 Initial Transverse MetacentreDocumento7 pagineSection 8 Initial Transverse MetacentrefaisalNessuna valutazione finora
- Class 2/1 Stability - Section 12 - Introduction To TrimDocumento19 pagineClass 2/1 Stability - Section 12 - Introduction To Trimfaisal100% (1)
- Class 2/1 Stability - Section 11 ListDocumento12 pagineClass 2/1 Stability - Section 11 Listfaisal100% (3)
- Section 22 - Bilging: Similarity of High Block Coefficient Hull Forms To Box-Shaped VesselsDocumento26 pagineSection 22 - Bilging: Similarity of High Block Coefficient Hull Forms To Box-Shaped Vesselsfaisal100% (1)
- Ortho XyleneDocumento18 pagineOrtho XylenefaisalNessuna valutazione finora
- CLASS 2/1 STABILITY - SECTION 21 - Dry-DockingDocumento11 pagineCLASS 2/1 STABILITY - SECTION 21 - Dry-DockingfaisalNessuna valutazione finora
- ROR CardsDocumento118 pagineROR Cardsfaisal100% (2)
- Overlord Volume 13 Chapter 4Documento85 pagineOverlord Volume 13 Chapter 4Ronny KimNessuna valutazione finora
- Reflection Activty 3 (Done)Documento1 paginaReflection Activty 3 (Done)theressa reidNessuna valutazione finora
- DLL - Mathematics 6 - Q3 - W7Documento12 pagineDLL - Mathematics 6 - Q3 - W7Gerome JutajeroNessuna valutazione finora
- Contrastive Linguistics - D2019 (Ms. Yen)Documento134 pagineContrastive Linguistics - D2019 (Ms. Yen)Lan Anh ChuNessuna valutazione finora
- 11 - Iso 2553 2019Documento62 pagine11 - Iso 2553 2019Md. Main UddinNessuna valutazione finora
- Environmental Ethics: Key Quote 9ADocumento29 pagineEnvironmental Ethics: Key Quote 9AAchmad JaelanieNessuna valutazione finora
- Journal of English For Academic Purposes: Christopher Hill, Susan Khoo, Yi-Chin HsiehDocumento13 pagineJournal of English For Academic Purposes: Christopher Hill, Susan Khoo, Yi-Chin Hsiehshuyu LoNessuna valutazione finora
- SR2019-06 (RD) Atlas of Siliceous Hot Spring Deposits - FINALDocumento62 pagineSR2019-06 (RD) Atlas of Siliceous Hot Spring Deposits - FINALMichael Platas100% (1)
- Watercolour Painting - Jean-Louis MorelleDocumento128 pagineWatercolour Painting - Jean-Louis MorelleAline Fa100% (16)
- Primary Structure For A Cubesat 1U For QKD Applications: Design and AnalysisDocumento7 paginePrimary Structure For A Cubesat 1U For QKD Applications: Design and AnalysisShoaib IqbalNessuna valutazione finora
- Rowbottom Cardinals and Jonsson Cardinals Are Almost The Same - E. M. KleinbergDocumento6 pagineRowbottom Cardinals and Jonsson Cardinals Are Almost The Same - E. M. KleinbergGabriel medinaNessuna valutazione finora
- 2015 Eccentric or Concentric Exercises For The Treatment of Tendinopathies...Documento11 pagine2015 Eccentric or Concentric Exercises For The Treatment of Tendinopathies...Castro WeithNessuna valutazione finora
- Noise Pollution - POLANDDocumento13 pagineNoise Pollution - POLANDMartyna GłusiecNessuna valutazione finora
- Advanced Surveying: Course Code: 15CE1114 L T P C 3 0 0 3Documento2 pagineAdvanced Surveying: Course Code: 15CE1114 L T P C 3 0 0 3rathan kumarNessuna valutazione finora
- Youngs ModulusDocumento10 pagineYoungs Modulusconnectrix.gohetrixNessuna valutazione finora
- Are Animals Getting Smarter?Documento1 paginaAre Animals Getting Smarter?Bismi IqbalNessuna valutazione finora
- MBEH'S - Final - Work (1) 27Documento72 pagineMBEH'S - Final - Work (1) 27Fon Palverd Brent BridenNessuna valutazione finora
- Sikahyflex 220 Window - Pds en PDFDocumento4 pagineSikahyflex 220 Window - Pds en PDFKaya EmanuelNessuna valutazione finora
- Advanced Control Theory 2nd Nagoor KaniDocumento3 pagineAdvanced Control Theory 2nd Nagoor Kaniunnvishnu20% (25)
- Automated Blood Culture SystemDocumento2 pagineAutomated Blood Culture SystemAltruist AcharyaNessuna valutazione finora
- 181 ECE110 Final ExamDocumento4 pagine181 ECE110 Final ExamPham Lê HuyNessuna valutazione finora
- Dolphin (PG) College of Science & Agriculture: Fee Per SemesterDocumento1 paginaDolphin (PG) College of Science & Agriculture: Fee Per Semesterlincon sNessuna valutazione finora
- 12em ComputerDocumento17 pagine12em ComputerAshish100% (2)
- Problems: C D y XDocumento7 pagineProblems: C D y XBanana QNessuna valutazione finora
- The Kushite World: Beiträge Zur Sudanforschung. Beiheft 9Documento16 pagineThe Kushite World: Beiträge Zur Sudanforschung. Beiheft 9Tarek Mohamed Tarek FouadNessuna valutazione finora
- Journal of King Saud University - Science: Naziya N. Mohammad Aziz Rehman, Prashant P. DixitDocumento8 pagineJournal of King Saud University - Science: Naziya N. Mohammad Aziz Rehman, Prashant P. DixitMrmc CovidNessuna valutazione finora
- Meaning and Definition of Social ScienceDocumento5 pagineMeaning and Definition of Social ScienceROSEMARY K PNessuna valutazione finora
- Ficha Técnica Flanger y Tapas de 80cm-Peligro Alta TensiónDocumento2 pagineFicha Técnica Flanger y Tapas de 80cm-Peligro Alta TensiónLeidyNessuna valutazione finora
- Alchemy As Donum DeiDocumento15 pagineAlchemy As Donum DeiAlchemist3573Nessuna valutazione finora
- Pet Handbook Reading WritingDocumento12 paginePet Handbook Reading WritingPhương Nguyễn NguyênNessuna valutazione finora