Potrebbero piacerti anche
- Sistemas de RealimentaciónDocumento18 pagineSistemas de RealimentaciónMario isaac ResendizNessuna valutazione finora
- El Control FeedforwardDocumento3 pagineEl Control FeedforwardkarlaNessuna valutazione finora
- Control FeedForward o Control AnticipativoDocumento5 pagineControl FeedForward o Control AnticipativoEduardo Omar Avila RegaladoNessuna valutazione finora
- Practica 4 Control en Cascada y FeddforwareDocumento11 paginePractica 4 Control en Cascada y FeddforwareSantiNeiraNessuna valutazione finora
- Control AnticipativoDocumento21 pagineControl AnticipativoGRACE MARILU CRUZ PAIVANessuna valutazione finora
- Practica 10 Sistemas de ControlDocumento15 paginePractica 10 Sistemas de ControlluisalfonsootalvaropaezNessuna valutazione finora
- Cuaderno de Control (1 Parcial)Documento50 pagineCuaderno de Control (1 Parcial)Behamin Carlos100% (1)
- Estrategias de Control AvanzadoDocumento13 pagineEstrategias de Control AvanzadoJesus Alexander Carreño PulidoNessuna valutazione finora
- Problemas y Acciones de ControlDocumento39 pagineProblemas y Acciones de ControlAlbertina OlivaresNessuna valutazione finora
- Sistemas de Control DistribuidoDocumento11 pagineSistemas de Control DistribuidoRodolfo BetanzosNessuna valutazione finora
- Control PidDocumento6 pagineControl PidKev UicabNessuna valutazione finora
- 2sistemas de Control en Lazo Cerrado y AbiertoDocumento6 pagine2sistemas de Control en Lazo Cerrado y AbiertobozocaseNessuna valutazione finora
- Unidad 3 Instrumentacion y ControlDocumento80 pagineUnidad 3 Instrumentacion y ControlCarlos cruz leal100% (3)
- Sistema Realimentado Con Pid PDFDocumento17 pagineSistema Realimentado Con Pid PDFCesarLavadoNessuna valutazione finora
- Control Overrid1Documento6 pagineControl Overrid1DIEGO MORALESNessuna valutazione finora
- Actividad 1 Control DigitalDocumento5 pagineActividad 1 Control DigitalCris TianNessuna valutazione finora
- Sistemas de ControlDocumento12 pagineSistemas de ControlalejandroteodoroNessuna valutazione finora
- TEORIASDocumento9 pagineTEORIASLucio Mamani CentenoNessuna valutazione finora
- Manual Universitario de Sistemas de Control AutomaticoDocumento33 pagineManual Universitario de Sistemas de Control AutomaticoAlexNessuna valutazione finora
- Esquema de Un Sistema de ControlDocumento9 pagineEsquema de Un Sistema de Controlmalcala__salazarNessuna valutazione finora
- Introduccion Al Sistema de Control 2Documento6 pagineIntroduccion Al Sistema de Control 2Miguel RoblesNessuna valutazione finora
- Control AnticipativoDocumento8 pagineControl AnticipativoErickBaruchChavezSerranoNessuna valutazione finora
- Actividad 1 Control DigitalDocumento5 pagineActividad 1 Control DigitalLuis Guillermo Cervantes ChávezNessuna valutazione finora
- Control de ProcesoDocumento15 pagineControl de ProcesoRaul AlvaradoNessuna valutazione finora
- Chiantera Duque Control Por AdelantoDocumento26 pagineChiantera Duque Control Por AdelantoVerónica Katherine Duque JimenezNessuna valutazione finora
- U1-Introducción A Los Sistemas de Control y Modelación MatemáticaDocumento11 pagineU1-Introducción A Los Sistemas de Control y Modelación MatemáticaAlex MeloNessuna valutazione finora
- Control Sistema LC y LADocumento10 pagineControl Sistema LC y LAAlex Cervantes Ramirez100% (6)
- Introducción Al Control AutomáticoDocumento6 pagineIntroducción Al Control AutomáticoLisandro Antonio Sanchez SolarNessuna valutazione finora
- Investigacion 1Documento4 pagineInvestigacion 1Zacarias GarciaNessuna valutazione finora
- Laboratorio 7 - Control PIDDocumento11 pagineLaboratorio 7 - Control PIDPatricia PerlacioNessuna valutazione finora
- Ejemplo de Un Control en CascadaDocumento5 pagineEjemplo de Un Control en CascadaJuan perezNessuna valutazione finora
- Controlador PIDDocumento8 pagineControlador PIDCalvin Erubiel Mendoza SeymNessuna valutazione finora
- Control CascadaDocumento8 pagineControl CascadaHugo LópezNessuna valutazione finora
- Sistemas de Control - Lazo Abierto - Lazo CerradoDocumento8 pagineSistemas de Control - Lazo Abierto - Lazo CerradoHiramSanchezHardyNessuna valutazione finora
- Resumen Nº1 - Control en Cascada.Documento8 pagineResumen Nº1 - Control en Cascada.Cesar Marino Basurto ContrerasNessuna valutazione finora
- Tema 6. Sistemas AutomáticosDocumento32 pagineTema 6. Sistemas AutomáticosRichar GuzmanNessuna valutazione finora
- Taller Oleoneumática ProporcionalDocumento10 pagineTaller Oleoneumática ProporcionalKevin DCNessuna valutazione finora
- Control AnticipativoDocumento20 pagineControl AnticipativoGrecia ChucNessuna valutazione finora
- p3 Resumen Sistemas DinamicosDocumento4 paginep3 Resumen Sistemas DinamicosEdwin GuzmánNessuna valutazione finora
- Cerrado, Abierto, Range (Modificado 8)Documento23 pagineCerrado, Abierto, Range (Modificado 8)PhillipLozanoUrquizoNessuna valutazione finora
- Unidad 3.-Introducción A La Teoría de Control PDFDocumento44 pagineUnidad 3.-Introducción A La Teoría de Control PDFMario Gonzalez100% (1)
- Unidad 3. - Introducción A La Teoría de ControlDocumento44 pagineUnidad 3. - Introducción A La Teoría de ControlMarco SosaNessuna valutazione finora
- Instrumentación y ControlDocumento165 pagineInstrumentación y ControlRaquel CáceresNessuna valutazione finora
- ProblemaDocumento5 pagineProblemaJuan David TrianaNessuna valutazione finora
- Actividad 3 Sistemas de ControlDocumento9 pagineActividad 3 Sistemas de ControlJeziel TovarNessuna valutazione finora
- Informe 1 - Sistema de ControlDocumento3 pagineInforme 1 - Sistema de ControlAlexandra MavareNessuna valutazione finora
- Control de Procesos QuimicosDocumento21 pagineControl de Procesos QuimicosRafael Quintero Sevilla100% (1)
- Guía No. 1 - Introducción A Los Sistemas de ControlDocumento11 pagineGuía No. 1 - Introducción A Los Sistemas de ControlJoan Manuel Moreno RojasNessuna valutazione finora
- Estructuras de ControlDocumento17 pagineEstructuras de ControlJonatan PerezNessuna valutazione finora
- Controlador PIDDocumento11 pagineControlador PIDCarlos LopezNessuna valutazione finora
- Apunte - Realimentación-4 PP, Foros de Electronica 2008Documento4 pagineApunte - Realimentación-4 PP, Foros de Electronica 2008Victor R VazquezNessuna valutazione finora
- 2.5 Tipos de Sistemas Y Error de Estado Estacionario Y Dinamico 2.5.1 Tipos de SistemasDocumento10 pagine2.5 Tipos de Sistemas Y Error de Estado Estacionario Y Dinamico 2.5.1 Tipos de SistemasJorge Alberto Cardenas MedinaNessuna valutazione finora
- 2.5 Tipos de Sistemas Y Error de Estado Estacionario Y Dinamico 2.5.1 Tipos de SistemasDocumento10 pagine2.5 Tipos de Sistemas Y Error de Estado Estacionario Y Dinamico 2.5.1 Tipos de SistemasJorge Alberto Cardenas MedinaNessuna valutazione finora
- EnsayoDocumento7 pagineEnsayoAngie Patricia Oviedo SaucedoNessuna valutazione finora
- Resumen Control Por AdelantoDocumento15 pagineResumen Control Por AdelantoFelipe AndinoNessuna valutazione finora
- Sistemas Dinamicos Fase 1Documento8 pagineSistemas Dinamicos Fase 1Jhon Rojas100% (1)
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDa EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasValutazione: 2.5 su 5 stelle2.5/5 (3)
- Comprobar pesadora: Revolucionando el control de calidad con la visión por computadoraDa EverandComprobar pesadora: Revolucionando el control de calidad con la visión por computadoraNessuna valutazione finora
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDa EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoValutazione: 4 su 5 stelle4/5 (4)
- 2.sensores PresiónDocumento5 pagine2.sensores PresiónDaniel MamaniNessuna valutazione finora
- John Henry NewmanDocumento2 pagineJohn Henry NewmanDaniel MamaniNessuna valutazione finora
- Titanio y Oxido de EstañoDocumento5 pagineTitanio y Oxido de EstañoDaniel MamaniNessuna valutazione finora
- La Pedagogía de John NewmaDocumento2 pagineLa Pedagogía de John NewmaDaniel Mamani100% (1)
- John DeweyDocumento1 paginaJohn DeweyDaniel MamaniNessuna valutazione finora
- Caso Clinico AutismoDocumento2 pagineCaso Clinico AutismoDaniel MamaniNessuna valutazione finora
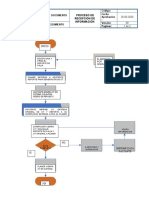
- Proceso de Recepción de InformaciónDocumento2 pagineProceso de Recepción de InformaciónDaniel MamaniNessuna valutazione finora
- Estándar General de Control de Energías Peligrosas - Estándar de Bloqueo (Lototo)Documento13 pagineEstándar General de Control de Energías Peligrosas - Estándar de Bloqueo (Lototo)Daniel MamaniNessuna valutazione finora
- Caracterizacion de Electrodos de TitanioDocumento4 pagineCaracterizacion de Electrodos de TitanioDaniel MamaniNessuna valutazione finora
- Factores Individuales y Medidas PreventivasDocumento27 pagineFactores Individuales y Medidas PreventivasDaniel MamaniNessuna valutazione finora
- La RadiologíaDocumento4 pagineLa RadiologíaDaniel MamaniNessuna valutazione finora
- Recuperación de Calor y Energía en HornosDocumento4 pagineRecuperación de Calor y Energía en HornosDaniel MamaniNessuna valutazione finora
- Lixiviacion en ColumnaDocumento7 pagineLixiviacion en ColumnaDaniel MamaniNessuna valutazione finora
- Examen Final Redaccion 2Documento18 pagineExamen Final Redaccion 2Alicia BasalduaNessuna valutazione finora
- WPS PQR WPQ Aws D1.1 SmawDocumento5 pagineWPS PQR WPQ Aws D1.1 SmawBrayan Montalban Garcia100% (2)
- Importancia de La Ética AmbientalDocumento1 paginaImportancia de La Ética Ambientalfundamento generalNessuna valutazione finora
- Informe de IsomeriaDocumento2 pagineInforme de IsomeriaALVARO marcanoNessuna valutazione finora
- FLUJOGRAMADocumento1 paginaFLUJOGRAMAKelly CasasNessuna valutazione finora
- CD 2309 PDFDocumento240 pagineCD 2309 PDFjorgeantonio2442@Nessuna valutazione finora
- Taller de Aprendizaje No.7 - (Solución de Caso) - 15!04!2020)Documento2 pagineTaller de Aprendizaje No.7 - (Solución de Caso) - 15!04!2020)alejandroNessuna valutazione finora
- Aplicacion de La Sinergia A La EmpresaDocumento5 pagineAplicacion de La Sinergia A La EmpresaJose Adrian Zarate MercadoNessuna valutazione finora
- Cuadro SinopticoDocumento1 paginaCuadro SinopticoMayco OjedaNessuna valutazione finora
- Esi Practicas Docentes 1Documento45 pagineEsi Practicas Docentes 1Rocky SuperNessuna valutazione finora
- Guía 10Documento10 pagineGuía 10carsnoopyNessuna valutazione finora
- Evaluacion Docente PediatriaDocumento2 pagineEvaluacion Docente Pediatriajhonnygarcia634Nessuna valutazione finora
- Costos y Presupuestos ClientesDocumento39 pagineCostos y Presupuestos ClientesJesus Felipe PoloNessuna valutazione finora
- Costos WimaxDocumento13 pagineCostos WimaxFranco Sinche SotoNessuna valutazione finora
- Diagnostico Estrategico SHM-PANMDocumento229 pagineDiagnostico Estrategico SHM-PANMJUAN CARLOS LOPEZ HUAMANNessuna valutazione finora
- Tabla de Las Teorias Del AprendizajeDocumento1 paginaTabla de Las Teorias Del Aprendizajejose eduardo rodriguez zarateNessuna valutazione finora
- Ciclo de Vida de La Familia DR VerdugoDocumento26 pagineCiclo de Vida de La Familia DR VerdugoNahim VerdugoNessuna valutazione finora
- Manual Alumno - Ergonomía y Auto Cuidado en Las EmpresasDocumento23 pagineManual Alumno - Ergonomía y Auto Cuidado en Las EmpresasEliana Olmos AyavireNessuna valutazione finora
- Tecnica de La Entrevista Clinica Actividades 1,2,3,4, y 5 FusionadasDocumento18 pagineTecnica de La Entrevista Clinica Actividades 1,2,3,4, y 5 FusionadasNorman PaulinoNessuna valutazione finora
- Reseña Critica Sobre La Pelicula "El Infierno" de Luis Estrada: La Verdadera RealidadDocumento8 pagineReseña Critica Sobre La Pelicula "El Infierno" de Luis Estrada: La Verdadera RealidadSebastian Cota100% (1)
- Intrumentos de Laboratorio 2.1.3Documento62 pagineIntrumentos de Laboratorio 2.1.3Martin Velazquez RubioNessuna valutazione finora
- Resumen Del Libro La MetaDocumento6 pagineResumen Del Libro La MetaCLAUDIA CUACIALPUD LASSO0% (1)
- Concepto de Educación Inicial - Definición enDocumento3 pagineConcepto de Educación Inicial - Definición enGLORIA EDID VANEGAS VILLANessuna valutazione finora
- Estabilidad de Frecuencia ELT 910Documento22 pagineEstabilidad de Frecuencia ELT 910Anahi E. López FloresNessuna valutazione finora
- Cuidado Con Los Programas de Descarga Directa Peer To Peer (P2P)Documento4 pagineCuidado Con Los Programas de Descarga Directa Peer To Peer (P2P)api-3745859Nessuna valutazione finora
- Aplicación de Políticas Públicas en Las Instituciones de EducativasDocumento18 pagineAplicación de Políticas Públicas en Las Instituciones de EducativasSantiago Htc100% (1)
- RacionalismoDocumento6 pagineRacionalismoAndrea AlzateNessuna valutazione finora
- Lo Que Aprendí de Warren BuffettDocumento7 pagineLo Que Aprendí de Warren BuffettRodo Gonzalez DelgadoNessuna valutazione finora
- GFPI-F-019 Formato Guía de Aprendizaje ExcelDocumento17 pagineGFPI-F-019 Formato Guía de Aprendizaje ExcelJhon Sebastian Ramirez MendezNessuna valutazione finora
- Ept 5Documento6 pagineEpt 5Jhojan Adrian CalleNessuna valutazione finora