Potrebbero piacerti anche
- MAX PLANCK - La Teoría Cuántica PDFDocumento168 pagineMAX PLANCK - La Teoría Cuántica PDFRaul Lopez Lopez100% (1)
- Modelo Tanque EsféricoDocumento13 pagineModelo Tanque EsféricoCarolina AmayaNessuna valutazione finora
- Aprende A REPARAR CONSOLAS de VIDEOJUEGOS PDFDocumento70 pagineAprende A REPARAR CONSOLAS de VIDEOJUEGOS PDFFelix Javier Moreno Hernandez0% (2)
- Guia Blender 2.5 Autor: Joaquín Herrera Goás (Joaclint Istgud)Documento45 pagineGuia Blender 2.5 Autor: Joaquín Herrera Goás (Joaclint Istgud)Jesús Odremán, El Perro Andaluz 101100% (6)
- Analogias Entre Transferencia de Calor, Masa y Cantidad de Movimiento EditandoDocumento25 pagineAnalogias Entre Transferencia de Calor, Masa y Cantidad de Movimiento EditandoJoshua Sang100% (1)
- Transferencia Calor y Masa - Capa Limite - JCMCDocumento36 pagineTransferencia Calor y Masa - Capa Limite - JCMCJuan Carlos Montes CalaNessuna valutazione finora
- Transferencia Calor y Masa - Capa Limite - JCMCDocumento36 pagineTransferencia Calor y Masa - Capa Limite - JCMCJuan Carlos Montes CalaNessuna valutazione finora
- Tareas Fenomenos1Documento19 pagineTareas Fenomenos1Lin Leon100% (1)
- Capitulo 3 Fenomenos de Transporte BirdDocumento5 pagineCapitulo 3 Fenomenos de Transporte BirdAugusto M. Roux50% (2)
- Buckley y LeverettDocumento21 pagineBuckley y LeverettJulyNessuna valutazione finora
- Santillana PDFDocumento34 pagineSantillana PDFNitzia OrtizNessuna valutazione finora
- Ecuaciones de Cantidad de MovimientoDocumento18 pagineEcuaciones de Cantidad de MovimientoAlejandro Briceño100% (6)
- Wa0067.Documento17 pagineWa0067.Estefania AguilarNessuna valutazione finora
- Unidad 5 Fenomenos 1Documento19 pagineUnidad 5 Fenomenos 1Kevin CarHerNessuna valutazione finora
- Unidad 5 FenomenosDocumento17 pagineUnidad 5 FenomenosKevin CarHerNessuna valutazione finora
- Lista 2 Transcal 2023Documento8 pagineLista 2 Transcal 2023Valentina CardenasNessuna valutazione finora
- Ecuación de Sistema IsotérmicoDocumento46 pagineEcuación de Sistema IsotérmicoJoyce Perez SeguraNessuna valutazione finora
- Edp Finitas 1Documento22 pagineEdp Finitas 1WiwiDataNessuna valutazione finora
- Aplicaciones de Las Ecuaciones DiferencialesDocumento13 pagineAplicaciones de Las Ecuaciones DiferencialesChristian LascanoNessuna valutazione finora
- Modelado huracán Isaac vectoresDocumento6 pagineModelado huracán Isaac vectoresMario Loeza CabreraNessuna valutazione finora
- Proyecto Ecuaciones de EstadoDocumento10 pagineProyecto Ecuaciones de EstadoIván Mateo Meneses RiveraNessuna valutazione finora
- Grupo14 VentilaciónForzadaCasino LíneasCorrienteDocumento15 pagineGrupo14 VentilaciónForzadaCasino LíneasCorrienteMaria Jose Castillo NovoaNessuna valutazione finora
- Frank M. Whithe Cap 4Documento64 pagineFrank M. Whithe Cap 4Edilberto Estevez TroncosoNessuna valutazione finora
- Informe Grupo 1Documento16 pagineInforme Grupo 1DAYANA CHACHA CASTRONessuna valutazione finora
- Dinamica - S01 - PPT - Campos Escalares y Vectoriales - FinalDocumento18 pagineDinamica - S01 - PPT - Campos Escalares y Vectoriales - FinalNicole AristeNessuna valutazione finora
- Articulo DosDocumento25 pagineArticulo DosIsabel LastraNessuna valutazione finora
- LissajousDocumento4 pagineLissajousDayrqNessuna valutazione finora
- MRUV: Representación práctica del movimiento rectilíneo uniformemente variadoDocumento9 pagineMRUV: Representación práctica del movimiento rectilíneo uniformemente variadoRyan ChavezNessuna valutazione finora
- 2023 IntroOctave-TP4Documento5 pagine2023 IntroOctave-TP4Matias SanchezNessuna valutazione finora
- Dinamica de Fluidos ComputucionalDocumento8 pagineDinamica de Fluidos ComputucionalCinthia Santamaria TeneNessuna valutazione finora
- Dinamica - S01 - PPT - Campos Escalares y Vectoriales - FinalDocumento17 pagineDinamica - S01 - PPT - Campos Escalares y Vectoriales - Finaldiego chavezNessuna valutazione finora
- Informe 2Documento13 pagineInforme 2Benjamin CorreaNessuna valutazione finora
- Guía Lab PropiedadesDocumento3 pagineGuía Lab PropiedadesPaula RojasNessuna valutazione finora
- Flujo No PermanenteDocumento34 pagineFlujo No PermanenteProfugo1567Nessuna valutazione finora
- Auditoría Flujo en Tuberías - Generalidades y Marco TeoDocumento10 pagineAuditoría Flujo en Tuberías - Generalidades y Marco TeoHOOTIE BAXTER RIOS SALDAÑANessuna valutazione finora
- Ecuación Diferencial de 2do Orden Con Raíces ImaginariasDocumento10 pagineEcuación Diferencial de 2do Orden Con Raíces ImaginariasRafaelffNessuna valutazione finora
- Ta 084Documento7 pagineTa 084San OseNessuna valutazione finora
- Taller de Series de TiempoDocumento131 pagineTaller de Series de TiempoWendy SequeirosNessuna valutazione finora
- Aceleración de una partícula en una boquilla de lavadoDocumento8 pagineAceleración de una partícula en una boquilla de lavadojhordy julian torres huaynateNessuna valutazione finora
- Guia Laboratorio #3 Perdidas en TuberíasDocumento22 pagineGuia Laboratorio #3 Perdidas en TuberíasDiego SanchezNessuna valutazione finora
- Tarea #10Documento16 pagineTarea #10Anderson Guevara ChumioqueNessuna valutazione finora
- Prueba de PozosDocumento8 paginePrueba de PozosCary MoyaNessuna valutazione finora
- Laboratorio Mua CanicaDocumento3 pagineLaboratorio Mua CanicaTazann2450% (2)
- Flujo Potencial - ZorrillaDocumento10 pagineFlujo Potencial - ZorrillaNicolay AbantoNessuna valutazione finora
- Informe 4 MRUADocumento4 pagineInforme 4 MRUALuis EduardoNessuna valutazione finora
- Taller 1 Métodos Numéricos 2016 1Documento3 pagineTaller 1 Métodos Numéricos 2016 1Melissa SuárezNessuna valutazione finora
- ADA3Documento14 pagineADA3Julian BurbanoNessuna valutazione finora
- Final AU RamonDocumento69 pagineFinal AU RamonJorge GuillenNessuna valutazione finora
- (David R. Kincaid, E. Ward Cheney) Numerical Analy (Z-Lib - Org) - 16-51.en - EsDocumento36 pagine(David R. Kincaid, E. Ward Cheney) Numerical Analy (Z-Lib - Org) - 16-51.en - EsRhazekNessuna valutazione finora
- Informe de Laboratorio N°01 FÍSICA - CINEMÁTICA-2-21Documento20 pagineInforme de Laboratorio N°01 FÍSICA - CINEMÁTICA-2-21anthony.urrelo.uNessuna valutazione finora
- Derrame de Petróleo en Un Canal: 1. IntroducciónDocumento5 pagineDerrame de Petróleo en Un Canal: 1. IntroducciónLaura Stefannia Olaya ValenciaNessuna valutazione finora
- Coleccion Examenes SFIactualizada 2019Documento18 pagineColeccion Examenes SFIactualizada 2019AbrahamNessuna valutazione finora
- Coleccion Examenes SFIactualizada 2020Documento18 pagineColeccion Examenes SFIactualizada 2020Victor GonzalezNessuna valutazione finora
- Informe Dittus BoelterDocumento15 pagineInforme Dittus BoelterElena Ferrer MartinezNessuna valutazione finora
- Como Realizar Los Calculos de La Practica de ReometriaDocumento2 pagineComo Realizar Los Calculos de La Practica de ReometriaRodrigo Jimenez-gallegosNessuna valutazione finora
- Analisis de La Capa Limite Viscosa y Capa LímiteDocumento13 pagineAnalisis de La Capa Limite Viscosa y Capa LímiteFredy Jhonny Mio PuertaNessuna valutazione finora
- Proyecto A.numerico - Grupo 9Documento26 pagineProyecto A.numerico - Grupo 9Ariel Yagual LunaNessuna valutazione finora
- FABIAN RAMOS, Henry StevenDocumento30 pagineFABIAN RAMOS, Henry StevenKhan Risvan100% (1)
- Matematica Cintya Pag 151Documento12 pagineMatematica Cintya Pag 151mario alexisNessuna valutazione finora
- Investigacion EcuacionesDiferencialesDocumento13 pagineInvestigacion EcuacionesDiferencialesYahir HernandezNessuna valutazione finora
- Lab 2 de FluidosDocumento17 pagineLab 2 de FluidosKarl MirandaNessuna valutazione finora
- Laboratorio 1 - Física I Ciclo II 2022Documento7 pagineLaboratorio 1 - Física I Ciclo II 2022Josue HernandezNessuna valutazione finora
- Movimiento en una dimensiónDocumento8 pagineMovimiento en una dimensiónCesar Rodríguez QuevedoNessuna valutazione finora
- Curvas Parametricas-Teoria Local de Curvas, Freddy Rabin PDFDocumento8 pagineCurvas Parametricas-Teoria Local de Curvas, Freddy Rabin PDFLuis OcañaNessuna valutazione finora
- Sólidos de revolución y cálculo de volumenDocumento28 pagineSólidos de revolución y cálculo de volumenElvis ToapantaNessuna valutazione finora
- Tarea 02 Reactores PBR JCMCDocumento4 pagineTarea 02 Reactores PBR JCMCJuan Carlos Montes CalaNessuna valutazione finora
- Tarea 01 Reactores JCMCDocumento9 pagineTarea 01 Reactores JCMCJuan Carlos Montes CalaNessuna valutazione finora
- 1.3 y 1.3.1 - Relación Con La Termodinamica - IncroperaDocumento48 pagine1.3 y 1.3.1 - Relación Con La Termodinamica - IncroperaJuan Carlos Montes CalaNessuna valutazione finora
- Tarea - 04 - Matemáticas AvanzadasDocumento18 pagineTarea - 04 - Matemáticas AvanzadasJuan Carlos Montes CalaNessuna valutazione finora
- Modelo K-W para flujos turbulentosDocumento21 pagineModelo K-W para flujos turbulentosJuan Carlos Montes CalaNessuna valutazione finora
- Flujo ReptanteDocumento11 pagineFlujo ReptanteJuan Carlos Montes CalaNessuna valutazione finora
- Flujo ReptanteDocumento11 pagineFlujo ReptanteJuan Carlos Montes CalaNessuna valutazione finora
- Tarea 05 Series Fourier JCMCDocumento6 pagineTarea 05 Series Fourier JCMCJuan Carlos Montes CalaNessuna valutazione finora
- Capitulo 11 - Seccion 11.3 - IncroperaDocumento16 pagineCapitulo 11 - Seccion 11.3 - IncroperaJuan Carlos Montes CalaNessuna valutazione finora
- Torton Español LibroDocumento32 pagineTorton Español LibroJuan Carlos Montes CalaNessuna valutazione finora
- Abc Beneficios Proteccion CesanteDocumento5 pagineAbc Beneficios Proteccion Cesanteluis mauricio ardila vargasNessuna valutazione finora
- Matematica SimbolicaDocumento11 pagineMatematica SimbolicaKelly Prada100% (1)
- Clase Simulink 01 Matlab 2017 IQ UISDocumento38 pagineClase Simulink 01 Matlab 2017 IQ UISJuan Carlos Montes CalaNessuna valutazione finora
- SEM y sus modos de operaciónDocumento22 pagineSEM y sus modos de operaciónJuan Carlos Montes CalaNessuna valutazione finora
- El Matemático Que Lucha Contra El Cáncer - Así Salvarán Vidas Los AlgoritmosDocumento9 pagineEl Matemático Que Lucha Contra El Cáncer - Así Salvarán Vidas Los AlgoritmosJuan Carlos Montes CalaNessuna valutazione finora
- Fenómenos TurbulentosDocumento30 pagineFenómenos TurbulentosAnaAcuñaMontezaNessuna valutazione finora
- Uranio: Combustible de Los Reactores Atómicos y de La Industria MilitarDocumento23 pagineUranio: Combustible de Los Reactores Atómicos y de La Industria MilitarSergio WatsonNessuna valutazione finora
- Taller Metodos Newton EDODocumento7 pagineTaller Metodos Newton EDOJuan Carlos Montes CalaNessuna valutazione finora
- Metodo Euler EjemploDocumento6 pagineMetodo Euler EjemploJuan Carlos Montes CalaNessuna valutazione finora
- Hoja de seguridad urea MSDSDocumento6 pagineHoja de seguridad urea MSDSJuan Carlos Montes CalaNessuna valutazione finora
- Ejercicios 2do Taller de Control de Procesos FinalDocumento8 pagineEjercicios 2do Taller de Control de Procesos FinalJuan Carlos Montes CalaNessuna valutazione finora
- O2 - 11 12 24 PDFDocumento8 pagineO2 - 11 12 24 PDFJuan Carlos Montes CalaNessuna valutazione finora
- PREInforme Filtración Al Vacio y Presion PDFDocumento13 paginePREInforme Filtración Al Vacio y Presion PDFJuan Carlos Montes CalaNessuna valutazione finora
- Trabajo FinalDocumento79 pagineTrabajo FinalElvis MartinezNessuna valutazione finora
- La Puerta A Las HeridasDocumento5 pagineLa Puerta A Las HeridasDavid ZambranoNessuna valutazione finora
- Programa - El Lenguaje de Las Sentencias Clave para Su Producción e InterpretaciónDocumento5 paginePrograma - El Lenguaje de Las Sentencias Clave para Su Producción e InterpretaciónRodolfo PepaNessuna valutazione finora
- Teorema de Bayes y probabilidad condicionalDocumento10 pagineTeorema de Bayes y probabilidad condicionalVanessa aguirre osorioNessuna valutazione finora
- Gravitación y Leyes de KeplerDocumento15 pagineGravitación y Leyes de KeplerYeisonNessuna valutazione finora
- Perfil del Director EducativoDocumento3 paginePerfil del Director EducativoVictor VillarrealNessuna valutazione finora
- Segundo principio termodinámicaDocumento20 pagineSegundo principio termodinámicaAgustina SanjuanNessuna valutazione finora
- Práctica BIOLOGIA 1Documento12 paginePráctica BIOLOGIA 1Ginger PatsoNessuna valutazione finora
- Microbiología de infecciones endodónticas: principales bacteriasDocumento5 pagineMicrobiología de infecciones endodónticas: principales bacteriasGrace SalasNessuna valutazione finora
- Informe de Evaluación Estructural Colegio Mariano MelgarDocumento22 pagineInforme de Evaluación Estructural Colegio Mariano MelgarStephanie Igreda DragoNessuna valutazione finora
- Tutoría Aprendo en Casa3Documento2 pagineTutoría Aprendo en Casa3Melissa Berrios CoaquiraNessuna valutazione finora
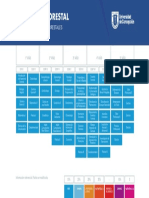
- Malla Ingenieria ForestalDocumento1 paginaMalla Ingenieria Forestaldiegoaf07Nessuna valutazione finora
- Semana 11 Del 8 Al 12 de Noviembre.Documento3 pagineSemana 11 Del 8 Al 12 de Noviembre.CINTHIA KARINA ROSALES MOLINANessuna valutazione finora
- ENSAYO EP 2-1 - Habilidades GerencialesDocumento6 pagineENSAYO EP 2-1 - Habilidades GerencialesJose EscamillaNessuna valutazione finora
- Laboratorio No. 1-Kimberly Zambrano PDFDocumento2 pagineLaboratorio No. 1-Kimberly Zambrano PDFkimNessuna valutazione finora
- Acuerdo 029 Politica Nacional para La Gestion de Vida SilvestreDocumento8 pagineAcuerdo 029 Politica Nacional para La Gestion de Vida SilvestreSolange AnzulesNessuna valutazione finora
- TecnofiliaDocumento14 pagineTecnofiliaCinthia AmasiNessuna valutazione finora
- Test 3Documento4 pagineTest 3Katherin Ordoñez MorenoNessuna valutazione finora
- ProblemasDocumento4 pagineProblemasBOSCO DIAZNessuna valutazione finora
- Eval Frecuente G1Documento8 pagineEval Frecuente G1Dennis JaramilloNessuna valutazione finora
- Señales en Tiempo y FrecuenciaDocumento7 pagineSeñales en Tiempo y FrecuenciaHenry ReyesNessuna valutazione finora
- Programaci N LinealDocumento8 pagineProgramaci N Linealwilfer8212Nessuna valutazione finora
- Exploración FísicaDocumento2 pagineExploración FísicaLuna Azul JessmaxiNessuna valutazione finora
- Qué Es El Protocolo y Etiqueta EmpresarialDocumento9 pagineQué Es El Protocolo y Etiqueta EmpresarialJhonathan HernandezNessuna valutazione finora
- GT23 - Transformador TrifasicoDocumento6 pagineGT23 - Transformador TrifasicoTatiana MozoNessuna valutazione finora
- Cátedra Farmacología. Trimestre Nov 12-Ene 13Documento230 pagineCátedra Farmacología. Trimestre Nov 12-Ene 13Jose Tomas NuñezNessuna valutazione finora
- Mejora de producto basada en necesidades insatisfechasDocumento21 pagineMejora de producto basada en necesidades insatisfechasfelipe villegasNessuna valutazione finora
- Actividad B6Documento2 pagineActividad B6Hemir RamosNessuna valutazione finora
- TECNICASDocumento6 pagineTECNICASAnimation ExtraNessuna valutazione finora