Potrebbero piacerti anche
- Possibilities and ProbabilitiesDocumento50 paginePossibilities and ProbabilitiesChuckry Daligdig Maunes50% (2)
- Possibilities and ProbabilitiesDocumento50 paginePossibilities and ProbabilitiesChuckry Daligdig Maunes50% (2)
- Possibilities and ProbabilitiesDocumento50 paginePossibilities and ProbabilitiesChuckry Daligdig Maunes50% (2)
- APA 6 BGS Qualitative Research Paper August 20142Documento46 pagineAPA 6 BGS Qualitative Research Paper August 20142Jacq Calaycay100% (2)
- Research Paper Proposal TemplateDocumento3 pagineResearch Paper Proposal TemplatePablo MoralesNessuna valutazione finora
- Code IV RankDocumento4 pagineCode IV RankJose GuzmanNessuna valutazione finora
- MS 101: Algorithms: Instructor Neelima Gupta Ngupta@cs - Du.ac - inDocumento28 pagineMS 101: Algorithms: Instructor Neelima Gupta Ngupta@cs - Du.ac - inbayentapasNessuna valutazione finora
- Minimum and MaximumDocumento28 pagineMinimum and MaximumDinoNessuna valutazione finora
- Algorithms and Data StructureDocumento20 pagineAlgorithms and Data StructureElvin AllazovNessuna valutazione finora
- CH 3Documento72 pagineCH 3Maria GrizeldaNessuna valutazione finora
- CH 4Documento58 pagineCH 4Maria GrizeldaNessuna valutazione finora
- Announcements: Weekly Reading Assignment: Chapter 9 (CLRS) (Not On This Exam)Documento17 pagineAnnouncements: Weekly Reading Assignment: Chapter 9 (CLRS) (Not On This Exam)Ibrahim HawariNessuna valutazione finora
- Advanced Programming TechniquesDocumento25 pagineAdvanced Programming TechniquesManoj KumarNessuna valutazione finora
- DSA-Analysis of AlgorithmsDocumento27 pagineDSA-Analysis of AlgorithmsNiba IlyasNessuna valutazione finora
- Sorting 32Documento11 pagineSorting 32dmybookNessuna valutazione finora
- DSA Notes Unit 1 To Unit 6Documento587 pagineDSA Notes Unit 1 To Unit 6manusheejaudayakumarNessuna valutazione finora
- SortheorypptDocumento62 pagineSortheorypptGowtham SaiNessuna valutazione finora
- Sample of The Study Material Part of Chapter 6 Sorting AlgorithmsDocumento10 pagineSample of The Study Material Part of Chapter 6 Sorting Algorithms1012804201Nessuna valutazione finora
- 2B SortsDocumento28 pagine2B SortsNatalia HassanNessuna valutazione finora
- Lecture 2.2.1Documento18 pagineLecture 2.2.1deadlygamer6996Nessuna valutazione finora
- Spring 2021: Data Structures 2Documento19 pagineSpring 2021: Data Structures 2AbazNessuna valutazione finora
- Data Structures and Algorithms: Lecture 7. Basic Sorting AlgorithmsDocumento26 pagineData Structures and Algorithms: Lecture 7. Basic Sorting AlgorithmsSzikinger Ďurica ArmaniNessuna valutazione finora
- Design and Analysis of Algorithms: Chapter 3 Brute ForceDocumento12 pagineDesign and Analysis of Algorithms: Chapter 3 Brute ForceThenmozhi RavichandranNessuna valutazione finora
- Session6 180119051900Documento21 pagineSession6 180119051900arnold brazaNessuna valutazione finora
- Daa Unit IIDocumento21 pagineDaa Unit IINikhil YasalapuNessuna valutazione finora
- 1.introduction DS Unit-1Documento39 pagine1.introduction DS Unit-1v.c cNessuna valutazione finora
- CPSC Algorithms Cheat SheetDocumento6 pagineCPSC Algorithms Cheat SheetRya KarkowskiNessuna valutazione finora
- Session7 180119051957Documento22 pagineSession7 180119051957arnold brazaNessuna valutazione finora
- IntroductionDocumento36 pagineIntroductionDiya GuptaNessuna valutazione finora
- Shubham Kumar - Resume - Software DeveloperDocumento5 pagineShubham Kumar - Resume - Software DeveloperCOMPETITIVE GURU JINessuna valutazione finora
- 1 DsaDocumento46 pagine1 Dsaabhinavreddy3057Nessuna valutazione finora
- 11 SortingDocumento21 pagine11 Sortingapi-3799621Nessuna valutazione finora
- Algorithmic Cost and ComplexityDocumento29 pagineAlgorithmic Cost and Complexityhbjethva6977Nessuna valutazione finora
- Week 3 - Part 3Documento15 pagineWeek 3 - Part 3Nurbek NussipbekovNessuna valutazione finora
- Cso 102 Week 1Documento30 pagineCso 102 Week 1Rahul kumar KeshriNessuna valutazione finora
- Chap-2 DSA (2017)Documento15 pagineChap-2 DSA (2017)YOHANIS YADETANessuna valutazione finora
- 1 Counting SortDocumento8 pagine1 Counting SortLucas NáiadeNessuna valutazione finora
- Sorting: - Dan Barrish-FloodDocumento21 pagineSorting: - Dan Barrish-FloodAsim AliNessuna valutazione finora
- Keys Into Buckets:: Lower Bounds, Linear-Time Sort, & HashingDocumento40 pagineKeys Into Buckets:: Lower Bounds, Linear-Time Sort, & HashingMaulik S HakaniNessuna valutazione finora
- DAA-Complete Buddha Series Unit-1 To 5Documento126 pagineDAA-Complete Buddha Series Unit-1 To 5abcmsms432Nessuna valutazione finora
- Data Structure - SolutionDocumento33 pagineData Structure - Solutionwrdmania15Nessuna valutazione finora
- Chapter 1 - IntroductionDocumento46 pagineChapter 1 - Introductionmishamoamanuel574Nessuna valutazione finora
- Brute Force and Exhaustive SearchDocumento46 pagineBrute Force and Exhaustive SearchReyohNessuna valutazione finora
- DAA Module-1Documento21 pagineDAA Module-1Krittika HegdeNessuna valutazione finora
- Sorting AlorithmsDocumento45 pagineSorting AlorithmsMagdaline KwambokaNessuna valutazione finora
- Lec 10 Sorting-MainDocumento55 pagineLec 10 Sorting-MainAlishba GondalNessuna valutazione finora
- Data Structures: Analysis of Insertion Sort, Bucket Sort and Radix Sort For Best, Worst and Average CaseDocumento23 pagineData Structures: Analysis of Insertion Sort, Bucket Sort and Radix Sort For Best, Worst and Average CaseKay KaraychayNessuna valutazione finora
- Lecture02 v03Documento17 pagineLecture02 v03Mykhailo ShubinNessuna valutazione finora
- Sorting TechniquesDocumento56 pagineSorting TechniquesSasidhar JalduNessuna valutazione finora
- L1-Linear Data StructureDocumento90 pagineL1-Linear Data StructureKavialagan ArjunanNessuna valutazione finora
- Data Structures: Analysis of Insertion Sort, Bucket Sort and Radix Sort For Best, Worst and Average CaseDocumento23 pagineData Structures: Analysis of Insertion Sort, Bucket Sort and Radix Sort For Best, Worst and Average CaseModase TanishNessuna valutazione finora
- What Is Algorithm?: - A Clearly Specified To Be Followed To Solve A ProblemDocumento43 pagineWhat Is Algorithm?: - A Clearly Specified To Be Followed To Solve A ProblemMahmoud AlbatieNessuna valutazione finora
- Bucket Sort - UNIT I - SortingDocumento26 pagineBucket Sort - UNIT I - SortingAnusha SomaraddiNessuna valutazione finora
- NIEIT Ada Lab ManualDocumento39 pagineNIEIT Ada Lab ManualMohammed MuzammilNessuna valutazione finora
- Sorting and Searching AlgorithmsDocumento49 pagineSorting and Searching AlgorithmsSubathra Devi MourouganeNessuna valutazione finora
- Subject:-Data Structure Using C 3 Semester A: G.H.Raisoni College of EngineeringDocumento6 pagineSubject:-Data Structure Using C 3 Semester A: G.H.Raisoni College of EngineeringbachayadavNessuna valutazione finora
- Sorting: CS 2401 Spring 2012Documento41 pagineSorting: CS 2401 Spring 2012DrJay GalletaNessuna valutazione finora
- Primitive DS Linear DSDocumento10 paginePrimitive DS Linear DSProf. Jignesh SohaliyaNessuna valutazione finora
- Sorting and Algorithm Analysis: Computer Science E-119 Harvard Extension School Fall 2012 David G. Sullivan, PH.DDocumento39 pagineSorting and Algorithm Analysis: Computer Science E-119 Harvard Extension School Fall 2012 David G. Sullivan, PH.DAnto PadaunanNessuna valutazione finora
- Unit 1 JwfilesDocumento38 pagineUnit 1 JwfilesgokulchandruNessuna valutazione finora
- Lecture-39 Internal Sorting TechniquesDocumento30 pagineLecture-39 Internal Sorting TechniquesTaqi ShahNessuna valutazione finora
- Vtu 3RD Sem Cse Data Structures With C Notes 10CS35Documento64 pagineVtu 3RD Sem Cse Data Structures With C Notes 10CS35EKTHATIGER63359075% (24)
- Sorting Algorithms: Guest Lecturer G. Alan Wang, ABDDocumento16 pagineSorting Algorithms: Guest Lecturer G. Alan Wang, ABDdosyaejjeNessuna valutazione finora
- 5 Kompleksitas AlgoritmaDocumento36 pagine5 Kompleksitas AlgoritmalaharadeoNessuna valutazione finora
- DS Unit 4Documento21 pagineDS Unit 4DevadharshiniNessuna valutazione finora
- Lecture 11: Process Modeling: OutlineDocumento8 pagineLecture 11: Process Modeling: Outlineutcm77Nessuna valutazione finora
- Information Systems Analysis and Design: Adang SuhendraDocumento36 pagineInformation Systems Analysis and Design: Adang SuhendratugasutomoNessuna valutazione finora
- IPEI Ebiz OssDocumento8 pagineIPEI Ebiz OssUbhakaBaskiNessuna valutazione finora
- DFD PDFDocumento13 pagineDFD PDFChanaka ErandaNessuna valutazione finora
- DFD PDFDocumento13 pagineDFD PDFChanaka ErandaNessuna valutazione finora
- DFD PDFDocumento13 pagineDFD PDFChanaka ErandaNessuna valutazione finora
- DFD PDFDocumento13 pagineDFD PDFChanaka ErandaNessuna valutazione finora
- Module9cg PDFDocumento46 pagineModule9cg PDFMary Ann SantiagoNessuna valutazione finora
- Statistical Tools in ResearchDocumento16 pagineStatistical Tools in ResearchebgambaNessuna valutazione finora
- Stress ManagementDocumento12 pagineStress ManagementebgambaNessuna valutazione finora
- Qualitative Research MethodsDocumento48 pagineQualitative Research Methodsaroma sweetsNessuna valutazione finora
- K To 12 Curriculum Implementation and Learning ManagementMatrix PDFDocumento577 pagineK To 12 Curriculum Implementation and Learning ManagementMatrix PDFJoyce Ann Amalang80% (5)
- Hipo LectureDocumento12 pagineHipo LectureJenny Sison-Wilson100% (7)
- Module9cg PDFDocumento46 pagineModule9cg PDFMary Ann SantiagoNessuna valutazione finora
- Objective: The Learners Identify The Personal Factors Influencing Career ChoicesDocumento22 pagineObjective: The Learners Identify The Personal Factors Influencing Career ChoicesebgambaNessuna valutazione finora
- FAMILY LegacyDocumento36 pagineFAMILY Legacyebgamba67% (3)
- 6 - AC Forum Workshop-Conference Evaluation-DataanalysisDocumento11 pagine6 - AC Forum Workshop-Conference Evaluation-DataanalysisebgambaNessuna valutazione finora
- A Step by Step Guide To Developing Effective Questionnaires PDFDocumento6 pagineA Step by Step Guide To Developing Effective Questionnaires PDFNurul SakiinahNessuna valutazione finora
- Report Card FRDocumento1 paginaReport Card FRebgambaNessuna valutazione finora
- Ict ModulesDocumento64 pagineIct ModulesJonardTan80% (5)
- 1.MIL 1. Introduction To MIL (Part 1) - Communication, Media, Information, Technology Literacy, and MILDocumento35 pagine1.MIL 1. Introduction To MIL (Part 1) - Communication, Media, Information, Technology Literacy, and MILebgambaNessuna valutazione finora
- 06 Introduction To Philosophy PDFDocumento8 pagine06 Introduction To Philosophy PDFebgambaNessuna valutazione finora
- 06 Introduction To Philosophy PDFDocumento8 pagine06 Introduction To Philosophy PDFebgambaNessuna valutazione finora
- 1.MIL 1. Introduction To MIL Part 2 Characteristics of Information Literate Individual and Importance of MILDocumento26 pagine1.MIL 1. Introduction To MIL Part 2 Characteristics of Information Literate Individual and Importance of MILMendelNessuna valutazione finora
- Information SecurityDocumento37 pagineInformation SecurityVamseeKrishna ChNessuna valutazione finora
- ATIENZA W2 AssignmentDocumento2 pagineATIENZA W2 AssignmentNicole AtienzaNessuna valutazione finora
- Data Science Bootcamp Curriculum 2Documento7 pagineData Science Bootcamp Curriculum 2khiariNessuna valutazione finora
- CUS9.Displaying Charts in T24 PDFDocumento17 pagineCUS9.Displaying Charts in T24 PDFMrCHANTHA100% (1)
- A Micro Project On "Peer To Peer Network Connection": Microproject (DCC)Documento17 pagineA Micro Project On "Peer To Peer Network Connection": Microproject (DCC)SAHIL JADHAVNessuna valutazione finora
- Charismathics Smart Security Interface: ManualDocumento58 pagineCharismathics Smart Security Interface: ManualvazmutenNessuna valutazione finora
- SCDA PPT PresentationDocumento20 pagineSCDA PPT PresentationRajasekar100% (1)
- Frequently Asked Questions On Batch Versions - Document 1487424.1Documento15 pagineFrequently Asked Questions On Batch Versions - Document 1487424.1Sudhakar MotadeNessuna valutazione finora
- Elint: Inteligencia Inteligencia Intelligence IntelligenceDocumento5 pagineElint: Inteligencia Inteligencia Intelligence IntelligenceDreamerNessuna valutazione finora
- Free Common Space v1.7 ReadmeDocumento3 pagineFree Common Space v1.7 ReadmeFlavio AlonsoNessuna valutazione finora
- List of Concept - and Mind-Mapping SoftwareDocumento7 pagineList of Concept - and Mind-Mapping Softwarenoah676Nessuna valutazione finora
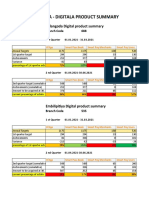
- Embilipitiya Area - Digitala Product SummaryDocumento14 pagineEmbilipitiya Area - Digitala Product Summaryrwl s.r.lNessuna valutazione finora
- Agile Process ModelsDocumento15 pagineAgile Process ModelsShadrack KimutaiNessuna valutazione finora
- Advanced Java Lab-Swing MVC AwtDocumento44 pagineAdvanced Java Lab-Swing MVC AwtVishal ChoudharyNessuna valutazione finora
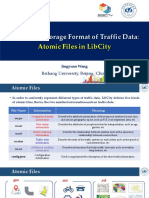
- A Unified Storage Format of Traffic Data Atomic Files in LibCityDocumento27 pagineA Unified Storage Format of Traffic Data Atomic Files in LibCityMohamed Abderrahim FellaouineNessuna valutazione finora
- Introduction To IF Statements in ExcelDocumento7 pagineIntroduction To IF Statements in Excelbayoumi333Nessuna valutazione finora
- Task 1Documento5 pagineTask 1pAPER VinesNessuna valutazione finora
- Instruction Manual VA 5xx Modbus RTU Slave InstallationDocumento28 pagineInstruction Manual VA 5xx Modbus RTU Slave InstallationMuhammad JunaidNessuna valutazione finora
- SR1CBL01: Product Data SheetDocumento2 pagineSR1CBL01: Product Data SheetEduardo SolísNessuna valutazione finora
- Т2 517 Hd Usb Pvr: High Definition Digital Terrestrial Receiver Free To AirDocumento1 paginaТ2 517 Hd Usb Pvr: High Definition Digital Terrestrial Receiver Free To AirjmolfigueiraNessuna valutazione finora
- Linux Clusters Institute: SchedulingDocumento93 pagineLinux Clusters Institute: SchedulingcquintoNessuna valutazione finora
- Cyber Kill Chain-Based Taxonomy of Advanced Persistent Threat Actors: Analogy of Tactics, Techniques, and ProceduresDocumento25 pagineCyber Kill Chain-Based Taxonomy of Advanced Persistent Threat Actors: Analogy of Tactics, Techniques, and ProceduresPerez CarlosNessuna valutazione finora
- MLOG GX CMXA75 v4 0 322985a0 UM-ENDocumento311 pagineMLOG GX CMXA75 v4 0 322985a0 UM-ENjamiekuangNessuna valutazione finora
- The First Virtualized Datacenter: Project BlackboxDocumento7 pagineThe First Virtualized Datacenter: Project Blackboxsmathies103841Nessuna valutazione finora
- Microsoft - Test King.98 383.v2021!04!29.by - David.7qDocumento7 pagineMicrosoft - Test King.98 383.v2021!04!29.by - David.7qDhanu ZamiliNessuna valutazione finora
- Communication Adapter General Information and Installation InstructionsDocumento6 pagineCommunication Adapter General Information and Installation Instructionssixin93551Nessuna valutazione finora
- 02 OperatorStationDocumento168 pagine02 OperatorStationbmw316100% (1)
- ZWO Micro Manager Plugin Manual ENDocumento12 pagineZWO Micro Manager Plugin Manual ENHasanBegzadehNessuna valutazione finora