Potrebbero piacerti anche
- Integrales Por Funciones TrigonométricasDocumento16 pagineIntegrales Por Funciones TrigonométricasgatoKENNessuna valutazione finora
- Examen Mecanica Fluidos Ii Entrada I - 2021 - Solucion 1Documento4 pagineExamen Mecanica Fluidos Ii Entrada I - 2021 - Solucion 1Jose Carlos Fabian Mamani VilcapazaNessuna valutazione finora
- Caso 3Documento4 pagineCaso 3maria renee miraldaNessuna valutazione finora
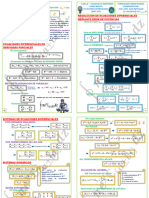
- Formulario 3er Parcial MAT207 Por AuxJReynaldoDocumento2 pagineFormulario 3er Parcial MAT207 Por AuxJReynaldojaviermillerlopez123Nessuna valutazione finora
- Evaluacion 1 de MatematicasDocumento3 pagineEvaluacion 1 de MatematicasHiroaki AkemiNessuna valutazione finora
- 1era Lista de Ejercicios - 1CM5 - HernandezHernandezAnaLuisaDocumento19 pagine1era Lista de Ejercicios - 1CM5 - HernandezHernandezAnaLuisaHernandez Hernandez Ana LuisaNessuna valutazione finora
- Fase 6 Grupo 17 PDFDocumento18 pagineFase 6 Grupo 17 PDFchristian muñoz restrepoNessuna valutazione finora
- Manual de WinplotDocumento8 pagineManual de WinplotJose Julian Graciano RodriguezNessuna valutazione finora
- Tarea4 - Segundo Ciclo - Formulacion y Evaluacion de Proyectos - Angel BernabeDocumento14 pagineTarea4 - Segundo Ciclo - Formulacion y Evaluacion de Proyectos - Angel BernabeAngel BernabeNessuna valutazione finora
- Evaluación de Desarrollo 01 A Modelo 2023 20Documento2 pagineEvaluación de Desarrollo 01 A Modelo 2023 20Leonardo Santos GalicioNessuna valutazione finora
- Prev.3 Ing - Control 1609A Guzman Alcantara Miguel GonzaloDocumento9 paginePrev.3 Ing - Control 1609A Guzman Alcantara Miguel GonzaloRafael Garcia IbarraNessuna valutazione finora
- Lab07 Practica CalificadaDocumento28 pagineLab07 Practica Calificadaluay963fansNessuna valutazione finora
- Practica #1 Automatizacion IndustrialDocumento9 paginePractica #1 Automatizacion Industrialpebeltran_01Nessuna valutazione finora
- Evaluación 01 Matemática 1.0 2020 10 Mayo 07Documento2 pagineEvaluación 01 Matemática 1.0 2020 10 Mayo 07luis valenciaNessuna valutazione finora
- Interpolación Polinomial de NewtonDocumento18 pagineInterpolación Polinomial de NewtonGina JimenezNessuna valutazione finora
- Castañeda Chable - S - 2do Parcial - Tarea 10 - Diseño de ExperimentosDocumento2 pagineCastañeda Chable - S - 2do Parcial - Tarea 10 - Diseño de ExperimentosSergio Castañeda ChableNessuna valutazione finora
- Guia de Aprendizaje Estadistica I No 1Documento3 pagineGuia de Aprendizaje Estadistica I No 1Jose Utrera100% (1)
- Fase 6 - Grupo 17Documento17 pagineFase 6 - Grupo 17Anonymous VdwKTUHGNessuna valutazione finora
- Circuito Integrador y DerivadorDocumento3 pagineCircuito Integrador y DerivadorjaberysNessuna valutazione finora
- Informe Parcial GamsDocumento10 pagineInforme Parcial GamsRichard ParraNessuna valutazione finora
- Taller 1Documento6 pagineTaller 1andres manuel molina perezNessuna valutazione finora
- Amplificadores Clase A1Documento3 pagineAmplificadores Clase A1Joel Ramiro Escalante OchoaNessuna valutazione finora
- Amplificadores Clase A1Documento3 pagineAmplificadores Clase A1Joel Ramiro Escalante OchoaNessuna valutazione finora
- Informe Santa RitaDocumento14 pagineInforme Santa RitaJames ParkerNessuna valutazione finora
- Amplificadores Operacionales 1Documento25 pagineAmplificadores Operacionales 1Ciro ArmijosNessuna valutazione finora
- Ejercicios Resueltos - Modulo IiDocumento39 pagineEjercicios Resueltos - Modulo IiND ALEXANDRANessuna valutazione finora
- U1-1 La Integral Indefinida Tema 1 OkDocumento24 pagineU1-1 La Integral Indefinida Tema 1 OkPiero PerezNessuna valutazione finora
- Tiempo de FresadoDocumento3 pagineTiempo de FresadoLuis Espinoza TaboadaNessuna valutazione finora
- EM M8 A2 Manuel ManjarrezDocumento13 pagineEM M8 A2 Manuel ManjarrezmanuelNessuna valutazione finora
- Formulario 3er Parcial MAT207 Por Aux JReynaldoDocumento2 pagineFormulario 3er Parcial MAT207 Por Aux JReynaldoNestor ChambiNessuna valutazione finora
- Actividad 2 Unidad 2Documento2 pagineActividad 2 Unidad 2Ximena HmNessuna valutazione finora
- Primer Examen SCDocumento18 paginePrimer Examen SCAndreaNessuna valutazione finora
- Informe de Lab 2 PDFDocumento20 pagineInforme de Lab 2 PDFMiguek A GarridoNessuna valutazione finora
- Electrónica de Potencia, Informe Fuente Conmutada Elevadora Con MosfetDocumento8 pagineElectrónica de Potencia, Informe Fuente Conmutada Elevadora Con MosfetJhon LeónNessuna valutazione finora
- Procesamiento Digital de Señales, Filtros, Transformada Z.Documento6 pagineProcesamiento Digital de Señales, Filtros, Transformada Z.alexis pedrozaNessuna valutazione finora
- Filtro FIR Y IIR, Analisis MatematicoDocumento8 pagineFiltro FIR Y IIR, Analisis Matematicoalexis pedrozaNessuna valutazione finora
- Procesamiento Digital de Señales Transformada Z Filtro IIR Y FIR.Documento8 pagineProcesamiento Digital de Señales Transformada Z Filtro IIR Y FIR.alexis pedrozaNessuna valutazione finora
- Ejercicio 3 Sem 11Documento6 pagineEjercicio 3 Sem 11YackelinRositaMestanzaDezaNessuna valutazione finora
- Método de Los HexágonosDocumento24 pagineMétodo de Los HexágonosLuis Reyes ChunaNessuna valutazione finora
- Unidad 1 2 y 3 Paso 7 Presentar ResultadosDocumento28 pagineUnidad 1 2 y 3 Paso 7 Presentar ResultadosRamon Hernan Bacca PiconNessuna valutazione finora
- p2 DISE O DE CIRCUITOS COMBINACIONALES PDFDocumento11 paginep2 DISE O DE CIRCUITOS COMBINACIONALES PDFGutierrez Ortega AdrianNessuna valutazione finora
- Procesamiento Digital de Señales Planificar Metodos y Herramientas para El Diseño de Filtros DigitalesDocumento4 pagineProcesamiento Digital de Señales Planificar Metodos y Herramientas para El Diseño de Filtros Digitalesalexis pedrozaNessuna valutazione finora
- Laboratorio N°3 de Mecanica de Fluidos 2 - Curvas de Remanso Flujo Gradualmente VariadoDocumento10 pagineLaboratorio N°3 de Mecanica de Fluidos 2 - Curvas de Remanso Flujo Gradualmente VariadoFernandoNessuna valutazione finora
- Canal Rectangular Diseño 2 Unidad GrandaDocumento8 pagineCanal Rectangular Diseño 2 Unidad GrandaFabrizzio Granda EscuderoNessuna valutazione finora
- Manual WinplotDocumento7 pagineManual WinplotzevasoNessuna valutazione finora
- TP3 Arguello CristhianDocumento5 pagineTP3 Arguello CristhianCriss ArguelloNessuna valutazione finora
- Taller Algebra Actividad 10 22052020Documento10 pagineTaller Algebra Actividad 10 22052020Alejandro OrtegaNessuna valutazione finora
- S02.s1 - MaterialDocumento35 pagineS02.s1 - MaterialSusanRCNessuna valutazione finora
- ECA2 R3 SolDocumento2 pagineECA2 R3 Solivan.romero.blancoNessuna valutazione finora
- Universidad Mayor, Real Y Pontificia de San Francisco Xavier de Chuquisaca Facultad de Ciencias Y TecnologiaDocumento4 pagineUniversidad Mayor, Real Y Pontificia de San Francisco Xavier de Chuquisaca Facultad de Ciencias Y TecnologiaLuis Espinoza TaboadaNessuna valutazione finora
- Prev.2 Ing - Control 1609A Guzman Alcantara Miguel GonzaloDocumento4 paginePrev.2 Ing - Control 1609A Guzman Alcantara Miguel GonzaloRafael Garcia IbarraNessuna valutazione finora
- Sistema de Coordenadas Rectangulares (Construcción)Documento1 paginaSistema de Coordenadas Rectangulares (Construcción)itechhacksNessuna valutazione finora
- Suministro de Energia ElectricaDocumento22 pagineSuministro de Energia Electricabarbara silvettyNessuna valutazione finora
- Formulario de Perforacion IIIDocumento4 pagineFormulario de Perforacion IIIYania SevericheNessuna valutazione finora
- Clases Sabado 4 02 23Documento5 pagineClases Sabado 4 02 23Giancarlo Flambury RiveroNessuna valutazione finora
- Metodo de Dos Fases Completo. (11)Documento19 pagineMetodo de Dos Fases Completo. (11)ANDREA FIORELLA MEZA VALENCIANessuna valutazione finora
- Ecin U1 Ea RiscDocumento10 pagineEcin U1 Ea RiscRicardo Segovia CastellanoNessuna valutazione finora
- Gráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraDa EverandGráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraNessuna valutazione finora
- Variables AleatoriasDocumento15 pagineVariables AleatoriasDennis VilañaNessuna valutazione finora
- Optimización Del Uso de VaporDocumento60 pagineOptimización Del Uso de VaporDennis VilañaNessuna valutazione finora
- Bloque05 - Teorema Del Limite Central y Dist - MuestDocumento13 pagineBloque05 - Teorema Del Limite Central y Dist - MuestDennis VilañaNessuna valutazione finora
- Estadística DescriptivaDocumento40 pagineEstadística DescriptivaDennis VilañaNessuna valutazione finora
- Control Fuzzy PDFDocumento9 pagineControl Fuzzy PDFDennis VilañaNessuna valutazione finora
- Ejercicio Suspensión Bus PDFDocumento1 paginaEjercicio Suspensión Bus PDFDennis Vilaña100% (1)
- Enunciado Péndulo Invertido PDFDocumento1 paginaEnunciado Péndulo Invertido PDFDennis VilañaNessuna valutazione finora
- Modelación de Plantas PDFDocumento6 pagineModelación de Plantas PDFDennis VilañaNessuna valutazione finora
- 8guia de Practicas Lab Termodinamica 2017aDocumento15 pagine8guia de Practicas Lab Termodinamica 2017aDennis VilañaNessuna valutazione finora
- Cuestionario Primer Corte 1 Habilidades GerencialesDocumento3 pagineCuestionario Primer Corte 1 Habilidades GerencialesJesus Osuna TapiaNessuna valutazione finora
- Pro-Dgm-01 01 Procedimiento de Inspeccion para Cierre de Mina y Abandono de Operaciones PDFDocumento10 paginePro-Dgm-01 01 Procedimiento de Inspeccion para Cierre de Mina y Abandono de Operaciones PDFAlejandro LópezNessuna valutazione finora
- Duramon Nitrozinc Ficha Tecnica ComprimidoDocumento2 pagineDuramon Nitrozinc Ficha Tecnica Comprimidoninguno12Nessuna valutazione finora
- 1° - GRADO - PROYECTO - DE - APRENDIZAJE Agosto°Documento11 pagine1° - GRADO - PROYECTO - DE - APRENDIZAJE Agosto°ROXI M.Nessuna valutazione finora
- Civica y Etica 4Documento8 pagineCivica y Etica 4Veronica HernándezNessuna valutazione finora
- Infectología 4. ParásitosDocumento16 pagineInfectología 4. ParásitosPaola Reyna O.Nessuna valutazione finora
- Lectura 1Documento24 pagineLectura 1Psicología UEEMNessuna valutazione finora
- Soluciontrabajo Ene20Documento20 pagineSoluciontrabajo Ene20Maximiliano xDNessuna valutazione finora
- Estudio Del Movimiento de Arrancada en Halterofilia Durante Ciclos de Repeticiones de Alta Intensidad Mediante Análisis CinemáticosDocumento15 pagineEstudio Del Movimiento de Arrancada en Halterofilia Durante Ciclos de Repeticiones de Alta Intensidad Mediante Análisis CinemáticosAdrian Moreno100% (1)
- Minerales, Clasificacion y UsosDocumento54 pagineMinerales, Clasificacion y UsosJonathan AndradeNessuna valutazione finora
- Elaine Heumann Gurian La Funcion Sigue A La FormaDocumento15 pagineElaine Heumann Gurian La Funcion Sigue A La FormaanaliamarielNessuna valutazione finora
- Fundamentos de Las GrasasDocumento6 pagineFundamentos de Las GrasasJuanSantillanNessuna valutazione finora
- Tarea 3 Ciclo Del AguaDocumento8 pagineTarea 3 Ciclo Del Agualuis enrique briones estradaNessuna valutazione finora
- BiocueroDocumento43 pagineBiocueroGaby PitryNessuna valutazione finora
- EVALUACIÒN DEL RIESGO MICROBIOLÒGICO (Tesis)Documento46 pagineEVALUACIÒN DEL RIESGO MICROBIOLÒGICO (Tesis)sofya benjumea castroNessuna valutazione finora
- Humedad SalchichaDocumento11 pagineHumedad SalchichaAilín Pérez67% (3)
- Aprendiendo de La HistoriaDocumento5 pagineAprendiendo de La Historiajuan julcaNessuna valutazione finora
- Naturalezas de Intervencion 2015Documento1 paginaNaturalezas de Intervencion 2015Walter HidalgoNessuna valutazione finora
- Seminario ProblemasDocumento19 pagineSeminario ProblemasRenzo Acevedo CanoNessuna valutazione finora
- El Mito de La AutoestimaDocumento3 pagineEl Mito de La AutoestimaCornelio Herrera CastilloNessuna valutazione finora
- T1 Identificación de La Empresa Del Sector AgroindustrialDocumento3 pagineT1 Identificación de La Empresa Del Sector Agroindustrialyuri corralesNessuna valutazione finora
- t3 PROYECTO SOCIALDocumento15 paginet3 PROYECTO SOCIALStefanny Teffy M CaballeroNessuna valutazione finora
- Comprensión Lectora (Punto 1) Cómo Se Consiguen Las Buenas CalificacionesDocumento2 pagineComprensión Lectora (Punto 1) Cómo Se Consiguen Las Buenas CalificacionesRodrigo Molina ArevaloNessuna valutazione finora
- Qué Materiales y Recursos Educativos Utilizarías para La Atención Educativa de Un Estudiante Con Discapacidad Severa o MultidiscapacidadDocumento2 pagineQué Materiales y Recursos Educativos Utilizarías para La Atención Educativa de Un Estudiante Con Discapacidad Severa o MultidiscapacidadCarmen Niño SalazarNessuna valutazione finora
- INTD Evid1 E#12Documento10 pagineINTD Evid1 E#12J HSNessuna valutazione finora
- DeFinance - La OntologíaDocumento8 pagineDeFinance - La OntologíaHéctor Alfonso Tadeo CadenaNessuna valutazione finora
- Ventajas Del Trabajo en EquipoDocumento4 pagineVentajas Del Trabajo en EquipoLuz Del CarmenNessuna valutazione finora
- Cartilla MARACUYADocumento40 pagineCartilla MARACUYACaldas Diego100% (1)
- Curso ECG - 2 Derivaciones y EjeDocumento114 pagineCurso ECG - 2 Derivaciones y EjeLalo GarciaNessuna valutazione finora
- Matematica IDocumento9 pagineMatematica IJose DiquezNessuna valutazione finora