Potrebbero piacerti anche
- George Bayer-Turning 400 Years of Astrology To Practical Use & Other Matters (1969) PDFDocumento194 pagineGeorge Bayer-Turning 400 Years of Astrology To Practical Use & Other Matters (1969) PDFdhritimohan50% (2)
- WD GANN Number VibrationsDocumento3 pagineWD GANN Number VibrationsAvishkar Dangat97% (39)
- 20 Years of Studying GannDocumento27 pagine20 Years of Studying GannNo Name100% (14)
- OEC 9800 PlusDocumento16 pagineOEC 9800 Plusابو حميد ابو حميدNessuna valutazione finora
- Ehrlich Cycle Finder PDFDocumento29 pagineEhrlich Cycle Finder PDFcannizzo45091Nessuna valutazione finora
- Novak ReichDocumento6 pagineNovak ReichSalim MarchantNessuna valutazione finora
- Mil Q2 Modules-7-8Documento28 pagineMil Q2 Modules-7-8Nyanko Soriano100% (1)
- Data SecurityDocumento200 pagineData SecuritybaselkhateebNessuna valutazione finora
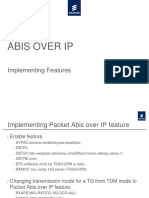
- ABIS OVER IP Implementing Features PDFDocumento11 pagineABIS OVER IP Implementing Features PDFManish SharmaNessuna valutazione finora
- Modulation Schemes (ERAN12.1 04)Documento142 pagineModulation Schemes (ERAN12.1 04)CosminD100% (1)
- Understanding and Coding Neural Networks From Scratch in Python and RDocumento15 pagineUnderstanding and Coding Neural Networks From Scratch in Python and Rsurajdhunna100% (1)
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningDa EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNessuna valutazione finora
- Understanding Neural NetworksDocumento12 pagineUnderstanding Neural NetworksKarol SkowronskiNessuna valutazione finora
- Bai 1 EngDocumento10 pagineBai 1 EngHanh Hong LENessuna valutazione finora
- Ann MJJ-1Documento64 pagineAnn MJJ-1RohitNessuna valutazione finora
- Back-Propagation Algorithm of CHBPN CodeDocumento10 pagineBack-Propagation Algorithm of CHBPN Codesch203Nessuna valutazione finora
- ML Module IiDocumento24 pagineML Module IiCrazy ChethanNessuna valutazione finora
- A Review of Artificial Neural Network (ANN)Documento5 pagineA Review of Artificial Neural Network (ANN)Praveen B PillaiNessuna valutazione finora
- A Multilayer Feed-Forward Neural NetworkDocumento9 pagineA Multilayer Feed-Forward Neural NetworkdebmatraNessuna valutazione finora
- Back Propagation Algorithm - A Review: Mrinalini Smita & Dr. Anita KumariDocumento6 pagineBack Propagation Algorithm - A Review: Mrinalini Smita & Dr. Anita KumariTJPRC PublicationsNessuna valutazione finora
- Unit 2 - Machine LearningDocumento19 pagineUnit 2 - Machine LearningGauri BansalNessuna valutazione finora
- Module 3.2 Time Series Forecasting LSTM ModelDocumento23 pagineModule 3.2 Time Series Forecasting LSTM ModelDuane Eugenio AniNessuna valutazione finora
- PythonUNIT IIDocumento76 paginePythonUNIT IIAnilNessuna valutazione finora
- Artificial Neural Network Image Processing: Presented byDocumento88 pagineArtificial Neural Network Image Processing: Presented bymadhu shree mNessuna valutazione finora
- Convolutional Neural NetworksDocumento21 pagineConvolutional Neural NetworksHarshaNessuna valutazione finora
- CSPE 102 - Module 3Documento19 pagineCSPE 102 - Module 3MC JERID C. BATUNGBAKALNessuna valutazione finora
- Understanding and Coding Neural Networks From Scratch in Python and RDocumento12 pagineUnderstanding and Coding Neural Networks From Scratch in Python and RKhương NguyễnNessuna valutazione finora
- Understanding and Creating Neural NetworksDocumento69 pagineUnderstanding and Creating Neural Networksnegisid126Nessuna valutazione finora
- Unit 2 v1.Documento41 pagineUnit 2 v1.Kommi Venkat sakethNessuna valutazione finora
- Unit 4Documento9 pagineUnit 4akkiketchumNessuna valutazione finora
- DL Question Bank AnswersDocumento55 pagineDL Question Bank AnswersAnkit MahapatraNessuna valutazione finora
- Unit 2 - Soft Computing - WWW - Rgpvnotes.inDocumento20 pagineUnit 2 - Soft Computing - WWW - Rgpvnotes.inRozy VadgamaNessuna valutazione finora
- Unit 4Documento38 pagineUnit 4Abhinav KaushikNessuna valutazione finora
- Understanding Backpropagation Algorithm - Towards Data ScienceDocumento11 pagineUnderstanding Backpropagation Algorithm - Towards Data ScienceKashaf BakaliNessuna valutazione finora
- Adaptive Linear Neuron Using Linear (Identity) Activation Function With Batch Gradient MethodDocumento19 pagineAdaptive Linear Neuron Using Linear (Identity) Activation Function With Batch Gradient MethodVansh SantdasaniNessuna valutazione finora
- Neural NetworksDocumento27 pagineNeural NetworksDania DallahNessuna valutazione finora
- Neural Net NotesDocumento7 pagineNeural Net Notesdiankusuma123Nessuna valutazione finora
- Principles of Training Multi-Layer Neural Network Using BackpropagationDocumento15 paginePrinciples of Training Multi-Layer Neural Network Using Backpropagationkamalamdharman100% (1)
- 9 - Neural Networks 1Documento11 pagine9 - Neural Networks 1Munam Naseer100% (1)
- Neural Network: Throughout The Whole Network, Rather Than at Specific LocationsDocumento8 pagineNeural Network: Throughout The Whole Network, Rather Than at Specific LocationsSrijal ManandharNessuna valutazione finora
- Name-Surya Pratap Singh Enrolment No. - 0829IT181023 Subject - Soft Computing Subject Code - IT701Documento17 pagineName-Surya Pratap Singh Enrolment No. - 0829IT181023 Subject - Soft Computing Subject Code - IT701Surya PratapNessuna valutazione finora
- A Probabilistic Theory of Deep Learning: Unit 2Documento17 pagineA Probabilistic Theory of Deep Learning: Unit 2HarshitNessuna valutazione finora
- The Perceptron, Delta Rule and Its VariantsDocumento7 pagineThe Perceptron, Delta Rule and Its VariantsMaryam FarisNessuna valutazione finora
- 2020a1t182 Assgn1Documento9 pagine2020a1t182 Assgn1Aahib NazirNessuna valutazione finora
- 8.2.1: Introduction To Neural Networks: ObjectivesDocumento11 pagine8.2.1: Introduction To Neural Networks: ObjectivesFikri HaekalNessuna valutazione finora
- Chap 2 Training Feed Forward Neural NetworksDocumento22 pagineChap 2 Training Feed Forward Neural NetworksHRITWIK GHOSHNessuna valutazione finora
- Character Recognition Using Neural Networks: Rókus Arnold, Póth MiklósDocumento4 pagineCharacter Recognition Using Neural Networks: Rókus Arnold, Póth MiklósSharath JagannathanNessuna valutazione finora
- CF AfDocumento22 pagineCF Afnath veerendraNessuna valutazione finora
- Unit 2Documento18 pagineUnit 2Nitya ShuklaNessuna valutazione finora
- ML Unit-2Documento141 pagineML Unit-26644 HaripriyaNessuna valutazione finora
- Training Neural Networks With GA Hybrid AlgorithmsDocumento12 pagineTraining Neural Networks With GA Hybrid Algorithmsjkl316Nessuna valutazione finora
- Unit VDocumento22 pagineUnit VUdaya sriNessuna valutazione finora
- An Introduction To Mathematics Behind Neural NetworksDocumento5 pagineAn Introduction To Mathematics Behind Neural Networkshilma a'yunina ifadaNessuna valutazione finora
- Tensorflow Keras Pytorch: Step 1: For Each Input, Multiply The Input Value X With Weights WDocumento6 pagineTensorflow Keras Pytorch: Step 1: For Each Input, Multiply The Input Value X With Weights Wisaac setabiNessuna valutazione finora
- CS231n Convolutional Neural Networks For Visual Recognition 2Documento12 pagineCS231n Convolutional Neural Networks For Visual Recognition 2famasyaNessuna valutazione finora
- Lecture-02: PGDDS 202Documento15 pagineLecture-02: PGDDS 202Lony IslamNessuna valutazione finora
- ANNDocumento3 pagineANNmuhammadhamzaansari06Nessuna valutazione finora
- Pattern Classification of Back-Propagation Algorithm Using Exclusive Connecting NetworkDocumento5 paginePattern Classification of Back-Propagation Algorithm Using Exclusive Connecting NetworkEkin RafiaiNessuna valutazione finora
- Deep Learning Algorithms Report PDFDocumento11 pagineDeep Learning Algorithms Report PDFrohillaanshul12Nessuna valutazione finora
- ML Unit-IvDocumento19 pagineML Unit-IvYadavilli VinayNessuna valutazione finora
- DL Unit 1Documento16 pagineDL Unit 1nitinNessuna valutazione finora
- Deep Learning in Astronomy - VIVEK KUMARDocumento6 pagineDeep Learning in Astronomy - VIVEK KUMARAniket SujayNessuna valutazione finora
- Fundamentals of Artificial Neural NetworksDocumento27 pagineFundamentals of Artificial Neural Networksbhaskar rao mNessuna valutazione finora
- Module 3 FinalDocumento88 pagineModule 3 FinalInfancy PioNessuna valutazione finora
- Deep Learning PDFDocumento55 pagineDeep Learning PDFNitesh Kumar SharmaNessuna valutazione finora
- Deep Learning Assignment 1 Solution: Name: Vivek Rana Roll No.: 1709113908Documento5 pagineDeep Learning Assignment 1 Solution: Name: Vivek Rana Roll No.: 1709113908vikNessuna valutazione finora
- Learning in Feedforward Layered Networks: The Tiling AlgorithmDocumento13 pagineLearning in Feedforward Layered Networks: The Tiling AlgorithmOgnjen OzegovicNessuna valutazione finora
- DL KIET Model Question PaperDocumento31 pagineDL KIET Model Question PaperSrinivas NaiduNessuna valutazione finora
- B.Tech Project Mid Term Report: Handwritten Digits Recognition Using Neural NetworksDocumento13 pagineB.Tech Project Mid Term Report: Handwritten Digits Recognition Using Neural NetworksVandhana RathodNessuna valutazione finora
- BTP Project ReportDocumento13 pagineBTP Project ReportVandhana RathodNessuna valutazione finora
- Job Satisfaction Survey: by Group No: 01 4 Year, 8 Semester Batch: 2016-2020Documento34 pagineJob Satisfaction Survey: by Group No: 01 4 Year, 8 Semester Batch: 2016-2020Gourab PalNessuna valutazione finora
- Contrast Enhancement and Bit Plane SlicingDocumento9 pagineContrast Enhancement and Bit Plane SlicingGourab PalNessuna valutazione finora
- Yashkirti Raj - CLSP - EXAM - PREPARATION - #7Documento2 pagineYashkirti Raj - CLSP - EXAM - PREPARATION - #7Gourab PalNessuna valutazione finora
- Yashkirti Raj - CLSP - EXAM - PREPARATION - #6Documento2 pagineYashkirti Raj - CLSP - EXAM - PREPARATION - #6Gourab PalNessuna valutazione finora
- Project PresentationDocumento3 pagineProject PresentationGourab PalNessuna valutazione finora
- Yashkirti Raj - DESIGN LAB Software TestingDocumento2 pagineYashkirti Raj - DESIGN LAB Software TestingGourab PalNessuna valutazione finora
- Yashkirti Raj - CLSP - EXAM - PREPARATION - #5Documento2 pagineYashkirti Raj - CLSP - EXAM - PREPARATION - #5Gourab PalNessuna valutazione finora
- Arghyadeep Manna - Answer SheetDocumento3 pagineArghyadeep Manna - Answer SheetGourab PalNessuna valutazione finora
- SYALLABUS - 7th SemDocumento12 pagineSYALLABUS - 7th SemGourab PalNessuna valutazione finora
- Mousumi 100Documento22 pagineMousumi 100Gourab PalNessuna valutazione finora
- C03 Media AccessDocumento26 pagineC03 Media AccessbimalhpaNessuna valutazione finora
- Mobile Computing BookDocumento736 pagineMobile Computing BookManiza HijabNessuna valutazione finora
- Tushara 130805021857 Phpapp01Documento27 pagineTushara 130805021857 Phpapp01Gourab PalNessuna valutazione finora
- Mmaire ThesisDocumento86 pagineMmaire ThesisGourab PalNessuna valutazione finora
- Lec05 SnakesDocumento70 pagineLec05 SnakesGourab PalNessuna valutazione finora
- CH 4Documento76 pagineCH 4Gourab PalNessuna valutazione finora
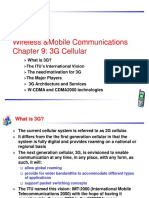
- Ch9-3G CellularDocumento21 pagineCh9-3G CellularGourab PalNessuna valutazione finora
- Pervasive ComputingDocumento4 paginePervasive ComputingLogu ThanigachalamNessuna valutazione finora
- Project SynopsisDocumento19 pagineProject SynopsisGourab PalNessuna valutazione finora
- Retinal Blood VesselDocumento14 pagineRetinal Blood VesselGourab PalNessuna valutazione finora
- VoucherDocumento3 pagineVoucheryudi_marliaNessuna valutazione finora
- EDU 655 Week 3 Discussion 1 Ashford University Student Education Keith C Quarles GRADE A PAPERDocumento3 pagineEDU 655 Week 3 Discussion 1 Ashford University Student Education Keith C Quarles GRADE A PAPERkeith_quarlesNessuna valutazione finora
- Chapter 6: Questions and AnswersDocumento51 pagineChapter 6: Questions and Answersnnbphuong810% (2)
- SofconDocumento18 pagineSofconJAY SolankiNessuna valutazione finora
- UNIX NotesDocumento4 pagineUNIX NotesAnil Kumar PatchaNessuna valutazione finora
- Project o LevelDocumento6 pagineProject o LevelShiraz KhanNessuna valutazione finora
- AA 003823 PB 3 ANX7411 Product BriefDocumento2 pagineAA 003823 PB 3 ANX7411 Product BriefChau Nguyen MinhNessuna valutazione finora
- Manual LindoDocumento6 pagineManual LindoJorge Ortiz OrdinolaNessuna valutazione finora
- PC-60. ManualDocumento47 paginePC-60. ManualZevnik d.o.o.Nessuna valutazione finora
- Inverse of A Matrix Using Elementary Row Operations (Gauss-Jordan)Documento5 pagineInverse of A Matrix Using Elementary Row Operations (Gauss-Jordan)Brian LeeNessuna valutazione finora
- Reality Behind Augmented Reality in Context of Adstuck: Minor Project OnDocumento50 pagineReality Behind Augmented Reality in Context of Adstuck: Minor Project Onanupam20099Nessuna valutazione finora
- Visual BasicDocumento8 pagineVisual BasicSUNNY KUMARNessuna valutazione finora
- Provided by Liberty University Digital CommonsDocumento32 pagineProvided by Liberty University Digital CommonsojuNessuna valutazione finora
- Strategy 1 Process Efficiencies Strategy 2: Strengthen Organization Strategy 3: People DevelopmentDocumento17 pagineStrategy 1 Process Efficiencies Strategy 2: Strengthen Organization Strategy 3: People DevelopmentjohnmarcNessuna valutazione finora
- Domestic Data Entry Operator Syllabus/ CurriculumDocumento4 pagineDomestic Data Entry Operator Syllabus/ CurriculumNIVI MEDIA TVNessuna valutazione finora
- InTouchOMI WhileOpenning LogSampleDocumento40 pagineInTouchOMI WhileOpenning LogSampleStanislav NosirevNessuna valutazione finora
- Section 6 Host Link CommandsDocumento35 pagineSection 6 Host Link CommandsvitexNessuna valutazione finora
- John The Ripper Usage Examples. Command Line.: Umask 077 Unshadow /etc/passwd /etc/shadow MypasswdDocumento6 pagineJohn The Ripper Usage Examples. Command Line.: Umask 077 Unshadow /etc/passwd /etc/shadow MypasswdDidik WijayantoNessuna valutazione finora
- LinuxKI 4.1 CURSODocumento78 pagineLinuxKI 4.1 CURSOXavi MilanNessuna valutazione finora
- Your Digital LifeDocumento3 pagineYour Digital LifeToby VueNessuna valutazione finora
- SPM Lec#07Documento34 pagineSPM Lec#07saleem janNessuna valutazione finora
- Module 1: Introduction To Social and Ethical ComputingDocumento27 pagineModule 1: Introduction To Social and Ethical ComputingalbatrossaloneNessuna valutazione finora
- Thesis Topics in Information TechnologyDocumento6 pagineThesis Topics in Information Technologyerikanelsonwashington100% (2)
- DMA301m MKT1814 Group1Documento10 pagineDMA301m MKT1814 Group1xuantoan501Nessuna valutazione finora
- Project AavinDocumento76 pagineProject AavinabishekNessuna valutazione finora