Potrebbero piacerti anche
- Informe de Diagnóstico Electronico y Mecanico Vehicular - Ev017Documento2 pagineInforme de Diagnóstico Electronico y Mecanico Vehicular - Ev017Diego Vera0% (1)
- Informe de Diagnóstico Electronico y Mecanico Vehicular - Ev017Documento2 pagineInforme de Diagnóstico Electronico y Mecanico Vehicular - Ev017Diego Vera0% (1)
- Informe de Escaneo Vehicular - Ev02Documento1 paginaInforme de Escaneo Vehicular - Ev02Diego VeraNessuna valutazione finora
- P1 TardDocumento2 pagineP1 TardSamuel PradaNessuna valutazione finora
- P1 YassDocumento3 pagineP1 YassSamuel PradaNessuna valutazione finora
- Ejemplo Banda BaseDocumento32 pagineEjemplo Banda BaseGeorge AlexisNessuna valutazione finora
- Curva Capacidad CT EsmeraldasDocumento8 pagineCurva Capacidad CT EsmeraldasRogger CriolloNessuna valutazione finora
- Anexos 1 - Codigo ArduinoDocumento3 pagineAnexos 1 - Codigo ArduinoAlex GomezNessuna valutazione finora
- Formulas para Determinar Des de SeccionesDocumento13 pagineFormulas para Determinar Des de Seccionesisa_wNessuna valutazione finora
- Diseno Rotor AxialDocumento12 pagineDiseno Rotor AxialromulozgNessuna valutazione finora
- Semaforo ProgramableDocumento3 pagineSemaforo Programablehaiber delgadoNessuna valutazione finora
- Peo MN Torres Mayor StevenDocumento5 paginePeo MN Torres Mayor StevenLeonardo CalderónNessuna valutazione finora
- Algoritmo FourierDocumento3 pagineAlgoritmo FourierALVARO MARTIN MELO BUENONessuna valutazione finora
- Arduino VtsDocumento2 pagineArduino VtsAditya PrakashNessuna valutazione finora
- Matlab Eje Del CompresorDocumento10 pagineMatlab Eje Del CompresorSantiago Palacios SierraNessuna valutazione finora
- Tarea #4-SIMULACIÓN DE SISTEMAS DE ENERGÍA ELÉCTRICADocumento16 pagineTarea #4-SIMULACIÓN DE SISTEMAS DE ENERGÍA ELÉCTRICAVictorNessuna valutazione finora
- HC Sr04 Con Pic en CcsDocumento6 pagineHC Sr04 Con Pic en CcsJohan Silva CuevaNessuna valutazione finora
- Codigo Diferencias Divididas Metodos NumericosDocumento2 pagineCodigo Diferencias Divididas Metodos NumericosWalter MartinezNessuna valutazione finora
- Problemas de Máquinas de Corriente AlternaDocumento23 pagineProblemas de Máquinas de Corriente AlternaJulio RuanoNessuna valutazione finora
- Generar Señales en MatlabDocumento16 pagineGenerar Señales en Matlabacajahuaringa100% (1)
- Informe Previo 7 Soto HenryDocumento6 pagineInforme Previo 7 Soto HenrySantiago FossatiNessuna valutazione finora
- Código Mikroce SIMULADORDocumento60 pagineCódigo Mikroce SIMULADORdanielNessuna valutazione finora
- MemoriaDocumento12 pagineMemoriaHouman RezakhanlouNessuna valutazione finora
- Cap5 - Modelos - de - Linea - y - PerformanceDocumento65 pagineCap5 - Modelos - de - Linea - y - PerformanceRudyJesusCapaIlizarbe100% (1)
- Solucixn Sesion 6xmainDocumento2 pagineSolucixn Sesion 6xmainJavierNessuna valutazione finora
- SDOF 05 Historia de RespuestaDocumento2 pagineSDOF 05 Historia de RespuestacharleslogarNessuna valutazione finora
- Modelado de Sistemas de Potencia Con MATLABDocumento37 pagineModelado de Sistemas de Potencia Con MATLABharoldNessuna valutazione finora
- MATLABDocumento2 pagineMATLABAlejandro Quevedo MuñozNessuna valutazione finora
- Practica 2 Arudino Hola KIT - Carlos JoseDocumento5 paginePractica 2 Arudino Hola KIT - Carlos JoseManuel Pérez SantillanaNessuna valutazione finora
- Practica 3 ComnDigDocumento16 paginePractica 3 ComnDigPinocho Obrayandi Negrete TellezNessuna valutazione finora
- Fundamentos de JavaDocumento36 pagineFundamentos de Javacperalta_514392Nessuna valutazione finora
- Tablas FourierDocumento7 pagineTablas FourierLuis GallardoNessuna valutazione finora
- Practica Capitulo5-MODELACIÓN DE SISTEMAS DE ENERGÍA ELÉCTRICADocumento16 paginePractica Capitulo5-MODELACIÓN DE SISTEMAS DE ENERGÍA ELÉCTRICAVictorNessuna valutazione finora
- 2023 ProgramasDocumento8 pagine2023 ProgramasNéstor Galeano ArenasNessuna valutazione finora
- Taller 2 SismicaDocumento27 pagineTaller 2 Sismicajulian gomezNessuna valutazione finora
- RHL2 AriasfernandezDocumento6 pagineRHL2 AriasfernandezKATHERINE ANDREA ARIAS FERNANDEZNessuna valutazione finora
- Integrales de LineaDocumento12 pagineIntegrales de LineaPablo Jose Hidalgo MontañoNessuna valutazione finora
- Progra Tarea 1Documento4 pagineProgra Tarea 1Mari Fer Pintor OlveraNessuna valutazione finora
- Trabajo N3 - NopermaDocumento3 pagineTrabajo N3 - NopermaRuben Ccanto CuriNessuna valutazione finora
- Control de Fase Con Triac y Pic688-Pedro CeronDocumento6 pagineControl de Fase Con Triac y Pic688-Pedro CeronPedro CeronNessuna valutazione finora
- Eeprom LM35Documento5 pagineEeprom LM35Victor IsraelNessuna valutazione finora
- AAaDocumento26 pagineAAaHarol Taysú Taboada MartinezNessuna valutazione finora
- Diagramas Correspondientes Al Taller 3 y Codigo Del Programa.Documento14 pagineDiagramas Correspondientes Al Taller 3 y Codigo Del Programa.LeoDannySanchezArcilaNessuna valutazione finora
- Tarea Primer Corte Conteo 0-9 (Teclado & Display 7 Segmentos)Documento7 pagineTarea Primer Corte Conteo 0-9 (Teclado & Display 7 Segmentos)cristhian munevarNessuna valutazione finora
- Sistemas de InventariosDocumento8 pagineSistemas de InventariosJuan Miguel Correa VillegasNessuna valutazione finora
- Laboratorio Sesion 13MNDocumento8 pagineLaboratorio Sesion 13MNAxel G MNNessuna valutazione finora
- Codigo AspiradoraDocumento6 pagineCodigo AspiradoraJuan Sebastian Diaz GuerreroNessuna valutazione finora
- Electromagnetic Simulation Using The FDTD MethodDocumento13 pagineElectromagnetic Simulation Using The FDTD MethodsanchezmsnNessuna valutazione finora
- Informe Sensor de Temperatura y HumedadDocumento4 pagineInforme Sensor de Temperatura y HumedadChistian SanchezNessuna valutazione finora
- Laboratorio Sesion 13MNDocumento7 pagineLaboratorio Sesion 13MNAxel G MNNessuna valutazione finora
- Toro Acosta Jose Eduardo Computacional - 14160196Documento6 pagineToro Acosta Jose Eduardo Computacional - 14160196Antony AVNessuna valutazione finora
- Practica 2do Parcial - Ita371Documento1 paginaPractica 2do Parcial - Ita371Sipudieras VerNessuna valutazione finora
- Practica 2Documento10 paginePractica 2Moisés Tapia BáezNessuna valutazione finora
- DesarrolloDocumento11 pagineDesarrolloEdi IbarraNessuna valutazione finora
- Filtrado de Señal Con Ruido de 60 HZDocumento7 pagineFiltrado de Señal Con Ruido de 60 HZKevin Alex Huamanttica SalasNessuna valutazione finora
- Sensor TemperaturaDocumento7 pagineSensor Temperaturaivantm15Nessuna valutazione finora
- Instalacion Electrica Tema 1Documento19 pagineInstalacion Electrica Tema 1Sergio Alexander Rivera ZepedaNessuna valutazione finora
- Iluminacion Exteriores Con LedDocumento32 pagineIluminacion Exteriores Con LedDiego VeraNessuna valutazione finora
- Canalizaciones ElectricasDocumento42 pagineCanalizaciones Electricaschombo92100% (2)
- Calculo de CargasDocumento8 pagineCalculo de Cargasjcarlos1284Nessuna valutazione finora
- Secciones 050-Cargas y F. de DemandaDocumento60 pagineSecciones 050-Cargas y F. de DemandaNavi ValleNessuna valutazione finora
- Calculo de CargasDocumento8 pagineCalculo de Cargasjcarlos1284Nessuna valutazione finora
- Estabilidad Permanente-CH MoyopamaDocumento5 pagineEstabilidad Permanente-CH MoyopamaDiego VeraNessuna valutazione finora
- Campos Electricos y Magneticos en Ingenieria EléctricaDocumento1 paginaCampos Electricos y Magneticos en Ingenieria EléctricaDiego VeraNessuna valutazione finora
- IPERCDocumento89 pagineIPERCDiego VeraNessuna valutazione finora
- Curva PV-PQDocumento12 pagineCurva PV-PQClemente Capani Juan AlfonsoNessuna valutazione finora
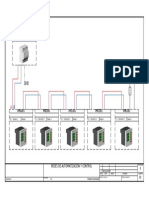
- Egx 300 Maestro1: Redes de Automatización Y ControlDocumento1 paginaEgx 300 Maestro1: Redes de Automatización Y ControlDiego VeraNessuna valutazione finora
- Paper IEEE TX en FrecuenciaDocumento6 paginePaper IEEE TX en FrecuenciapablodcbaNessuna valutazione finora
- Ev. Continua 3 - Vera Delgado DiegoDocumento1 paginaEv. Continua 3 - Vera Delgado DiegoDiego VeraNessuna valutazione finora
- 1 Estabilidad Transitoria - 2014 PDFDocumento29 pagine1 Estabilidad Transitoria - 2014 PDFRenzoChavezJuradoNessuna valutazione finora
- OCW-CCE S19 Respuesta en Frecuencia de Amplificadores Con TransistoresDocumento22 pagineOCW-CCE S19 Respuesta en Frecuencia de Amplificadores Con Transistorescarolinne5Nessuna valutazione finora
- Expo Diego Capitulo 2Documento15 pagineExpo Diego Capitulo 2Diego VeraNessuna valutazione finora
- Campo Eléctrico y Campo Magnético 2020Documento1 paginaCampo Eléctrico y Campo Magnético 2020Diego VeraNessuna valutazione finora
- PONENCIA Tecse 10.09 ProcDocumento72 paginePONENCIA Tecse 10.09 ProcDiego VeraNessuna valutazione finora
- Expo Diego Capitulo 2Documento15 pagineExpo Diego Capitulo 2Diego VeraNessuna valutazione finora
- PONENCIA Tecse 10.09 ProcDocumento72 paginePONENCIA Tecse 10.09 ProcDiego VeraNessuna valutazione finora
- Definiciones Cne UtilizacionDocumento164 pagineDefiniciones Cne UtilizacionDiego VeraNessuna valutazione finora
- Seguridad Elctrica en Minería de Baja TensionDocumento28 pagineSeguridad Elctrica en Minería de Baja TensionDiego VeraNessuna valutazione finora
- Definiciones Cne UtilizacionDocumento164 pagineDefiniciones Cne UtilizacionDiego VeraNessuna valutazione finora
- Sistema de Gestion Ambiental de Central Hidroeléctrica Charcani SGADocumento1 paginaSistema de Gestion Ambiental de Central Hidroeléctrica Charcani SGADiego VeraNessuna valutazione finora
- Trabajo Ace2Documento21 pagineTrabajo Ace2Diego VeraNessuna valutazione finora
- Trabajo Ace2Documento21 pagineTrabajo Ace2Diego VeraNessuna valutazione finora