Potrebbero piacerti anche
- Raunak Nath, Tsega Kassaye Derseh: Members Identified With An "X" Above)Documento5 pagineRaunak Nath, Tsega Kassaye Derseh: Members Identified With An "X" Above)umang nath100% (1)
- Azure WVD - Design Document - 20210601 v0.03Documento42 pagineAzure WVD - Design Document - 20210601 v0.03RASHMI RNessuna valutazione finora
- Group Work Project: Mscfe 630 Computational FinanceDocumento7 pagineGroup Work Project: Mscfe 630 Computational FinanceCMD AsiaNessuna valutazione finora
- 5 - WQU - 622 CTSP - M5 - CompiledContentDocumento34 pagine5 - WQU - 622 CTSP - M5 - CompiledContentJoe NgNessuna valutazione finora
- MScFE 560 FM - Notes1 - M1 - U1Documento7 pagineMScFE 560 FM - Notes1 - M1 - U1chiranshNessuna valutazione finora
- MScFE 560 Financial Markets Syllabus 1.2.19 PDFDocumento12 pagineMScFE 560 Financial Markets Syllabus 1.2.19 PDFsiddarthNessuna valutazione finora
- Worldquant University EconometricsDocumento12 pagineWorldquant University EconometricsIvan SimNessuna valutazione finora
- MScFE 560 FM - Compiled - Notes - M2 PDFDocumento21 pagineMScFE 560 FM - Compiled - Notes - M2 PDFtylerNessuna valutazione finora
- Mscfe XXX (Course Name) - Module X: Collaborative Review TaskDocumento57 pagineMscfe XXX (Course Name) - Module X: Collaborative Review TaskManit AhlawatNessuna valutazione finora
- Approximate Option Valuation For Arbitrary Stochastic ProcessesDocumento23 pagineApproximate Option Valuation For Arbitrary Stochastic ProcessesZhang PeilinNessuna valutazione finora
- Discrete-Time Stochastic Process Group Work ProjectDocumento11 pagineDiscrete-Time Stochastic Process Group Work ProjectvikrantNessuna valutazione finora
- Linky Map Linky MapDocumento14 pagineLinky Map Linky MapDavor BudimirNessuna valutazione finora
- All Things BIM - AIA BIM Protocol (E202)Documento3 pagineAll Things BIM - AIA BIM Protocol (E202)ana.r.araujoNessuna valutazione finora
- BONUS - 5 Other Places You Can Sell Your Calligraphy PrintsDocumento51 pagineBONUS - 5 Other Places You Can Sell Your Calligraphy Printssekhar203512Nessuna valutazione finora
- MScFE 620 DTSP - Compiled - Video - Transcripts - M1 PDFDocumento14 pagineMScFE 620 DTSP - Compiled - Video - Transcripts - M1 PDFRocApplyNessuna valutazione finora
- MScFE 620 DTSP - Compiled - Notes - M1 PDFDocumento25 pagineMScFE 620 DTSP - Compiled - Notes - M1 PDFRocApplyNessuna valutazione finora
- MScFE 620 DTSP - Video - Transcripts - M1Documento14 pagineMScFE 620 DTSP - Video - Transcripts - M1vikrantNessuna valutazione finora
- WQU MScFE Discrete-Time Stochastic Processes Module 1Documento52 pagineWQU MScFE Discrete-Time Stochastic Processes Module 1muwada huzairu100% (1)
- WQU - MScFE - Discrete-Time Stochastic Processes - Module 1 PDFDocumento52 pagineWQU - MScFE - Discrete-Time Stochastic Processes - Module 1 PDFmuwada huzairuNessuna valutazione finora
- MScFE 610 ECON - Compiled - Video - Transcripts - M4Documento9 pagineMScFE 610 ECON - Compiled - Video - Transcripts - M4sadiqpmpNessuna valutazione finora
- CRT 3Documento7 pagineCRT 3Dickson phiriNessuna valutazione finora
- MScFE 650 MLF - Video - Transcripts - M3Documento19 pagineMScFE 650 MLF - Video - Transcripts - M3kknsNessuna valutazione finora
- WQU Grading Rubric GWA 5.2.19Documento1 paginaWQU Grading Rubric GWA 5.2.19Ahmed SabryNessuna valutazione finora
- MScFE 610 Econometrics - CompiledVideo - Transcripts - M2Documento14 pagineMScFE 610 Econometrics - CompiledVideo - Transcripts - M2SahahNessuna valutazione finora
- MScFE 620 DTSP-Compiled-Notes-M5Documento13 pagineMScFE 620 DTSP-Compiled-Notes-M5SahahNessuna valutazione finora
- WorldQuant University CatalogDocumento40 pagineWorldQuant University CatalogImam slaouiNessuna valutazione finora
- Group Work Project: Mscfe 660 Case Studies in Risk ManagementDocumento7 pagineGroup Work Project: Mscfe 660 Case Studies in Risk ManagementHo Thanh Quyen100% (1)
- Mscfe XXX (Course Name) - Module X: Collaborative Review TaskDocumento19 pagineMscfe XXX (Course Name) - Module X: Collaborative Review TaskkknsNessuna valutazione finora
- Unit 2: Elements of Financial Markets: Price Determination and DiscoveryDocumento3 pagineUnit 2: Elements of Financial Markets: Price Determination and DiscoverychiranshNessuna valutazione finora
- MScFE 610 ECON - Video - Transcript - Lecture1 - M6 - U1Documento3 pagineMScFE 610 ECON - Video - Transcript - Lecture1 - M6 - U1sadiqpmpNessuna valutazione finora
- MScFE 650 MLF - Video - Transcripts - M1Documento17 pagineMScFE 650 MLF - Video - Transcripts - M1kknsNessuna valutazione finora
- MScFE 560 FM - Compiled - Notes - M5Documento21 pagineMScFE 560 FM - Compiled - Notes - M5sadiqpmp0% (1)
- MScFE 610 ECON - Compiled - Notes - M3Documento26 pagineMScFE 610 ECON - Compiled - Notes - M3sadiqpmpNessuna valutazione finora
- MScFE 650 MLF - Video - Transcripts - M2Documento23 pagineMScFE 650 MLF - Video - Transcripts - M2kknsNessuna valutazione finora
- MScFE 610 ECON - Compiled - Video - Transcripts - M6Documento18 pagineMScFE 610 ECON - Compiled - Video - Transcripts - M6sadiqpmpNessuna valutazione finora
- WorldQuant University CatalogDocumento58 pagineWorldQuant University Catalogsoothsayer144Nessuna valutazione finora
- WQU - Econometrics - Module2 - Compiled ContentDocumento73 pagineWQU - Econometrics - Module2 - Compiled ContentYumiko Huang100% (1)
- Gmail - Congratulations - WorldQuant University Introduction To Data ScienceDocumento2 pagineGmail - Congratulations - WorldQuant University Introduction To Data Sciencelarry pageNessuna valutazione finora
- Group Project - Module 5: Eric Cooper, Chrispin Phiri, Francis Mtambo, and Chamunorwa KarimanziraDocumento9 pagineGroup Project - Module 5: Eric Cooper, Chrispin Phiri, Francis Mtambo, and Chamunorwa KarimanziraFrancis MtamboNessuna valutazione finora
- MScFE 560 FM - Notes4 - M5 - U4Documento4 pagineMScFE 560 FM - Notes4 - M5 - U4aashu0123Nessuna valutazione finora
- WQU - MScFE - Discrete-Time Stochastic Processes - M2 PDFDocumento35 pagineWQU - MScFE - Discrete-Time Stochastic Processes - M2 PDFmuwada huzairu100% (1)
- (21/04) Mscfe 660 Case Studies in Risk Management (C20-S1) Module 5: The 2008 Global Financial Crisis Practice Quiz M5 (Ungraded)Documento4 pagine(21/04) Mscfe 660 Case Studies in Risk Management (C20-S1) Module 5: The 2008 Global Financial Crisis Practice Quiz M5 (Ungraded)Abdullah AbdullahNessuna valutazione finora
- DTSP - Compiled Content - Module 7 PDFDocumento29 pagineDTSP - Compiled Content - Module 7 PDFvikrantNessuna valutazione finora
- Compiled Notes: Mscfe 610 EconometricsDocumento29 pagineCompiled Notes: Mscfe 610 Econometricssadiqpmp100% (1)
- MScFE 610 ECON - Compiled - Notes - M6Documento29 pagineMScFE 610 ECON - Compiled - Notes - M6sadiqpmpNessuna valutazione finora
- WQU Financial Markets Module 5 Compiled ContentDocumento29 pagineWQU Financial Markets Module 5 Compiled Contentvikrant50% (2)
- 3 - WQU - 622 CTSP - M3 - CompiledContentDocumento31 pagine3 - WQU - 622 CTSP - M3 - CompiledContentJoe Ng100% (1)
- Mscfe 622 Continuous-Time Stochastic Processes - Course SyllabusDocumento1 paginaMscfe 622 Continuous-Time Stochastic Processes - Course SyllabusAbdullah AbdullahNessuna valutazione finora
- WQU Resource LinksDocumento8 pagineWQU Resource LinksDeepak JainNessuna valutazione finora
- MScFE 620 DTSP Compiled Notes M5Documento16 pagineMScFE 620 DTSP Compiled Notes M5sudokuxNessuna valutazione finora
- Wqu Catalog 2019Documento52 pagineWqu Catalog 2019Victor FrankensteinNessuna valutazione finora
- Mscfe XXX (Course Name) - Module X: Collaborative Review TaskDocumento40 pagineMscfe XXX (Course Name) - Module X: Collaborative Review TaskSammi DellNessuna valutazione finora
- (19 - 10) MScFE 622 Continuous-Time Stochastic Processes (C19-S2) - Module 5 Problem SetDocumento5 pagine(19 - 10) MScFE 622 Continuous-Time Stochastic Processes (C19-S2) - Module 5 Problem SetMoses E.M.K.TommieNessuna valutazione finora
- Brochure AM in Quantitative Finance PDFDocumento6 pagineBrochure AM in Quantitative Finance PDFqueue2010Nessuna valutazione finora
- MScFE 300 Group Work Project 2 Python CodesDocumento2 pagineMScFE 300 Group Work Project 2 Python CodesBryanNessuna valutazione finora
- WQU Financial Markets Module 1 Compiled Content PDFDocumento29 pagineWQU Financial Markets Module 1 Compiled Content PDFJaeN_Programmer67% (3)
- WQU Financial Markets Module 7Documento26 pagineWQU Financial Markets Module 7joca12890% (1)
- WQU Program CatalogDocumento51 pagineWQU Program Catalogalberto jayaNessuna valutazione finora
- Smart BetaDocumento24 pagineSmart BetaAbhishek GuptaNessuna valutazione finora
- WQU Financial Markets Module 2 PDFDocumento34 pagineWQU Financial Markets Module 2 PDFAbhishek Jyoti100% (1)
- Dashboard / My Courses / (22/02) Mscfe 620 Discrete-Time Stochastic Processes (C21-S4) / Module 2: Stochastic Processes / Practice Quiz M2 (Ungraded)Documento8 pagineDashboard / My Courses / (22/02) Mscfe 620 Discrete-Time Stochastic Processes (C21-S4) / Module 2: Stochastic Processes / Practice Quiz M2 (Ungraded)aseemNessuna valutazione finora
- A Monte Carlo Comparison Between The Free Cash Flow and Discounted Cash Flow ApproachesDocumento17 pagineA Monte Carlo Comparison Between The Free Cash Flow and Discounted Cash Flow ApproachesShito RyuNessuna valutazione finora
- 1 - WQU - CTSP - M1 - Compiled - ContentDocumento35 pagine1 - WQU - CTSP - M1 - Compiled - ContentJoe Ng100% (1)
- Difference Equations in Normed Spaces: Stability and OscillationsDa EverandDifference Equations in Normed Spaces: Stability and OscillationsNessuna valutazione finora
- References M2 For DTSPDocumento1 paginaReferences M2 For DTSPvikrantNessuna valutazione finora
- References M1 For DTSPDocumento1 paginaReferences M1 For DTSPvikrantNessuna valutazione finora
- Econometrics - Submission M1 PDFDocumento2 pagineEconometrics - Submission M1 PDFvikrantNessuna valutazione finora
- WQU - Econometrics - Compiled Content - Module5 PDFDocumento46 pagineWQU - Econometrics - Compiled Content - Module5 PDFvikrantNessuna valutazione finora
- Financial Markets Group Work ProjectDocumento6 pagineFinancial Markets Group Work ProjectvikrantNessuna valutazione finora
- WQU Financial Markets Module 5 Compiled ContentDocumento29 pagineWQU Financial Markets Module 5 Compiled Contentvikrant50% (2)
- Financial Markets Group Work ProjectDocumento6 pagineFinancial Markets Group Work ProjectvikrantNessuna valutazione finora
- DTSP - Compiled Content - Module 7 PDFDocumento29 pagineDTSP - Compiled Content - Module 7 PDFvikrantNessuna valutazione finora
- WQU - DTSP - Module 5 - Compiled - Content PDFDocumento32 pagineWQU - DTSP - Module 5 - Compiled - Content PDFvikrantNessuna valutazione finora
- DTSP - Compiled Content - Module 1Documento57 pagineDTSP - Compiled Content - Module 1vikrantNessuna valutazione finora
- B. SC - ElectronicsDocumento55 pagineB. SC - Electronicsjerushi karuNessuna valutazione finora
- Group 3 - SRM Project ReportDocumento10 pagineGroup 3 - SRM Project ReportAkash IyappanNessuna valutazione finora
- Betriebsanleitung - Operating Instructions: Turbomolecular Drag PumpsDocumento26 pagineBetriebsanleitung - Operating Instructions: Turbomolecular Drag PumpsChung NguyenNessuna valutazione finora
- SMVDSR Geotech Research & Quality Control Lab. Deptt. of Geology. Geological Bore LogDocumento1 paginaSMVDSR Geotech Research & Quality Control Lab. Deptt. of Geology. Geological Bore LogS R SINGHNessuna valutazione finora
- 64Gb, 128Gb, and 256Gb Sxs Pro+ Series Memory CardDocumento4 pagine64Gb, 128Gb, and 256Gb Sxs Pro+ Series Memory CarddeltaNessuna valutazione finora
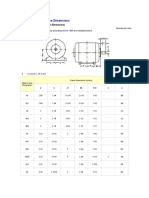
- Nema Electrical Motors FrameDocumento11 pagineNema Electrical Motors FrameLuckie IbrahimNessuna valutazione finora
- Kataria Books20110718Documento4 pagineKataria Books20110718Sharad KumbharanaNessuna valutazione finora
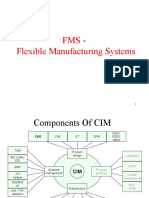
- Fms - Flexible Manufacturing SystemsDocumento47 pagineFms - Flexible Manufacturing SystemsYashwanth ReddyNessuna valutazione finora
- TNB Tariff BookDocumento14 pagineTNB Tariff BookRamani KrishnamoorthyNessuna valutazione finora
- Sap Security and ControlsDocumento19 pagineSap Security and Controlssandeep kumarNessuna valutazione finora
- PDF 1st Quarter Exam Empowerment TechDocumento3 paginePDF 1st Quarter Exam Empowerment Techlawrence100% (1)
- Informative EssayDocumento5 pagineInformative EssayTrishia May ReyesNessuna valutazione finora
- Adults Guide To Special Interest Areas 07Documento13 pagineAdults Guide To Special Interest Areas 07Warwick AudetNessuna valutazione finora
- Visit Our Homepage For Further Details On Our Packaging Solutions: Front BackDocumento4 pagineVisit Our Homepage For Further Details On Our Packaging Solutions: Front BackdjokanomcaNessuna valutazione finora
- Carrier Aggregation (5G RAN6.1 - 02)Documento199 pagineCarrier Aggregation (5G RAN6.1 - 02)VVL1959Nessuna valutazione finora
- Long Term Evolution: Author: Badal MishraDocumento19 pagineLong Term Evolution: Author: Badal Mishrabadal mishraNessuna valutazione finora
- Curriculum Vitae - Ruben Puli: Personal DetailDocumento6 pagineCurriculum Vitae - Ruben Puli: Personal DetailRuben PuliNessuna valutazione finora
- Philips TV Software Upgrade With USB Portable MemoryDocumento4 paginePhilips TV Software Upgrade With USB Portable MemoryAmin AsawabNessuna valutazione finora
- IA Compressor & SystemDocumento51 pagineIA Compressor & SystemKazi Irfan100% (1)
- Manual Satlink Ws 6908Documento12 pagineManual Satlink Ws 6908Sacal's Carlos100% (2)
- Senior Accountant Resume SampleDocumento6 pagineSenior Accountant Resume Samplec2mtjr7c100% (1)
- Honeywell VisionPro 8000 Install InstructionsDocumento12 pagineHoneywell VisionPro 8000 Install InstructionskoolermanNessuna valutazione finora
- Bahan Training Infus SpaceDocumento20 pagineBahan Training Infus SpaceSanchia JanitaNessuna valutazione finora
- RARP Admin Building-Design PDFDocumento22 pagineRARP Admin Building-Design PDFravi kumarNessuna valutazione finora
- Lightning Eliminators & Consultants, Inc. Lightning Eliminators & Consultants, IncDocumento4 pagineLightning Eliminators & Consultants, Inc. Lightning Eliminators & Consultants, IncDuyên Nguyễn NgọcNessuna valutazione finora
- Ak-2 - en - Tcd210131ab - 20220128 - Catalog - W 2Documento2 pagineAk-2 - en - Tcd210131ab - 20220128 - Catalog - W 2JOSE GONZALONessuna valutazione finora