Potrebbero piacerti anche
- E (N) Equivariant Normalizing Flows: Equal ContributionDocumento12 pagineE (N) Equivariant Normalizing Flows: Equal ContributionAlessio GagliardiNessuna valutazione finora
- 11 Upper Bound Resonances Anosov FlowsDocumento40 pagine11 Upper Bound Resonances Anosov FlowsFrédéric FaureNessuna valutazione finora
- 小论文 - Modeling of flexible non-linear dynamic links in Nano-Positioning Motion SystemsDocumento10 pagine小论文 - Modeling of flexible non-linear dynamic links in Nano-Positioning Motion Systems侯涛Nessuna valutazione finora
- Alain Goriely and Michael Tabor - Nonlinear Dynamics of Filaments III: Instabilities of Helical RodsDocumento20 pagineAlain Goriely and Michael Tabor - Nonlinear Dynamics of Filaments III: Instabilities of Helical RodsDopameNessuna valutazione finora
- Difference Equations in Normed Spaces: Stability and OscillationsDa EverandDifference Equations in Normed Spaces: Stability and OscillationsNessuna valutazione finora
- Department of Mechanical Engineering Michigan State University East Lansing, MI 48824 USADocumento20 pagineDepartment of Mechanical Engineering Michigan State University East Lansing, MI 48824 USARahul BamaniaNessuna valutazione finora
- Analysis of Limit Cycle Flutter of An Airfoil in Incompressible FlowDocumento13 pagineAnalysis of Limit Cycle Flutter of An Airfoil in Incompressible FlowallentvmNessuna valutazione finora
- Asian Journal of Civil Engineering (Building and Housing) Vol. 8Documento16 pagineAsian Journal of Civil Engineering (Building and Housing) Vol. 8muhammadyf100% (2)
- Flexural M O T I O N of A Radially Rotating Beam Attached T O A Rigid BodyDocumento10 pagineFlexural M O T I O N of A Radially Rotating Beam Attached T O A Rigid BodyAkshat RastogiNessuna valutazione finora
- Slow Invariant Manifold As Curvature of The Flow of Dynamical SystemsDocumento22 pagineSlow Invariant Manifold As Curvature of The Flow of Dynamical SystemsGINOUX Jean-MarcNessuna valutazione finora
- Master-Slave Approach For The Modelling of Joints With Dependent Degrees of Freedom in Exible MechanismsDocumento14 pagineMaster-Slave Approach For The Modelling of Joints With Dependent Degrees of Freedom in Exible MechanismsGabrielNessuna valutazione finora
- Moving Objects and Their Equations of Motion: AbstractDocumento12 pagineMoving Objects and Their Equations of Motion: AbstractWílmór L Përsìä Jr.Nessuna valutazione finora
- Andre2014 PDFDocumento16 pagineAndre2014 PDFCarl Daniel BolislisNessuna valutazione finora
- Fractal Analysis and Tumor GrowthDocumento14 pagineFractal Analysis and Tumor GrowthDidima ToalaNessuna valutazione finora
- Crane, Pinkall, Schröder - 2013 - Robust Fairing Via Conformal Curvature FlowDocumento10 pagineCrane, Pinkall, Schröder - 2013 - Robust Fairing Via Conformal Curvature FlowpinkallNessuna valutazione finora
- Introduction. Configuration Space. Equations of Motion. Velocity Phase SpaceDocumento11 pagineIntroduction. Configuration Space. Equations of Motion. Velocity Phase SpaceArjun Kumar SinghNessuna valutazione finora
- Kristiansen-Egeland1999 Chapter ObserverDesignForNonlinearOsci PDFDocumento16 pagineKristiansen-Egeland1999 Chapter ObserverDesignForNonlinearOsci PDFShadNessuna valutazione finora
- Digital Simulation of Random Processes and Its ApplicationsDocumento18 pagineDigital Simulation of Random Processes and Its ApplicationsHemanth C KNessuna valutazione finora
- 2009 Lucko Linear Schedule Analysis With Singularity PDFDocumento23 pagine2009 Lucko Linear Schedule Analysis With Singularity PDFAhmed ShaheenNessuna valutazione finora
- Gord Is 1979Documento12 pagineGord Is 1979NixonNessuna valutazione finora
- Wigner 1939Documento57 pagineWigner 1939Ricardo Miguel PedroNessuna valutazione finora
- Algebras Advanced Lecture NoteDocumento16 pagineAlgebras Advanced Lecture NoteHuong Cam ThuyNessuna valutazione finora
- Local U (2, 2) Symmetry in Relativistic Quantum MechanicsDocumento18 pagineLocal U (2, 2) Symmetry in Relativistic Quantum MechanicsElUniversoNessuna valutazione finora
- Seminar on Micro-Local Analysis. (AM-93), Volume 93Da EverandSeminar on Micro-Local Analysis. (AM-93), Volume 93Nessuna valutazione finora
- Statistical Fourier Analysis - Clarifications and Interpretations DSG PollockDocumento42 pagineStatistical Fourier Analysis - Clarifications and Interpretations DSG PollockchibuikeiNessuna valutazione finora
- Mass, Stiffness, and Damping Matrix Estimates From Structural MeasurementsDocumento7 pagineMass, Stiffness, and Damping Matrix Estimates From Structural Measurementscarlos0094Nessuna valutazione finora
- Modelo HoffDocumento8 pagineModelo HoffDunga PessoaNessuna valutazione finora
- The Equilibrium Equations of Membrane Shells Expressed in General Surface CoordinatesDocumento50 pagineThe Equilibrium Equations of Membrane Shells Expressed in General Surface CoordinatesAbhishekNessuna valutazione finora
- NODYCON2019 050 Final v4Documento8 pagineNODYCON2019 050 Final v4Othman Ben MekkiNessuna valutazione finora
- Leung-Kuang2006 Article OnTheChaoticDynamicsOfASphericDocumento26 pagineLeung-Kuang2006 Article OnTheChaoticDynamicsOfASphericjaimeraisNessuna valutazione finora
- Iu (TT) L LW (TJ) L (W (TJ)Documento17 pagineIu (TT) L LW (TJ) L (W (TJ)EliotPezoZegarraNessuna valutazione finora
- Deprit 1969Documento19 pagineDeprit 1969Horacio Alexis SanhuezaNessuna valutazione finora
- Book 04 ChileDocumento2 pagineBook 04 ChilehoraciowioNessuna valutazione finora
- Algebraic Methods in Statistical Mechanics and Quantum Field TheoryDa EverandAlgebraic Methods in Statistical Mechanics and Quantum Field TheoryNessuna valutazione finora
- Reference Trajectory Tracking For A multi-DOF Robot Arm: 10.1515/acsc-2015-0033Documento15 pagineReference Trajectory Tracking For A multi-DOF Robot Arm: 10.1515/acsc-2015-0033Zafer GökNessuna valutazione finora
- Westerweel 1997Documento15 pagineWesterweel 1997بلال بن عميرهNessuna valutazione finora
- Constructed Layered Systems: Measurements and AnalysisDa EverandConstructed Layered Systems: Measurements and AnalysisNessuna valutazione finora
- Chapter 1Documento21 pagineChapter 1Pranav DardaNessuna valutazione finora
- Optimization Transfer Algorithms in StatisticsDocumento29 pagineOptimization Transfer Algorithms in StatisticsKhông Còn Phù HợpNessuna valutazione finora
- dp08 36 PDFDocumento40 paginedp08 36 PDFchrischovNessuna valutazione finora
- University of Durham: Topology of Robot Motion PlanningDocumento46 pagineUniversity of Durham: Topology of Robot Motion PlanningJulio ArticaNessuna valutazione finora
- Tutorial On The Continuous and Discrete Adjoint State Method and Basic ImplementationDocumento11 pagineTutorial On The Continuous and Discrete Adjoint State Method and Basic ImplementationKhánh DuyNessuna valutazione finora
- Gunnar Lucko PDFDocumento7 pagineGunnar Lucko PDFMauricio VieiraNessuna valutazione finora
- Notes On Micro Controller and Digital Signal ProcessingDocumento70 pagineNotes On Micro Controller and Digital Signal ProcessingDibyajyoti BiswasNessuna valutazione finora
- 94 (Grape JMR 05)Documento27 pagine94 (Grape JMR 05)Max PieriniNessuna valutazione finora
- Bosonic String TheoryDocumento50 pagineBosonic String Theorysumairah1906Nessuna valutazione finora
- Proper Orthogonal DecompositionDocumento10 pagineProper Orthogonal DecompositionKenry Xu ChiNessuna valutazione finora
- Timedomain ControlDocumento32 pagineTimedomain Controldhruvi kapadiaNessuna valutazione finora
- Amplitude Spectra Fit LandscapeDocumento27 pagineAmplitude Spectra Fit LandscapebarrospiresNessuna valutazione finora
- The Calculus of VariationsDocumento52 pagineThe Calculus of VariationsKim HsiehNessuna valutazione finora
- Transverse Standing Waves in A Nonuniform Line and Their Empirical VerificationsDocumento6 pagineTransverse Standing Waves in A Nonuniform Line and Their Empirical Verificationsdwi johdiNessuna valutazione finora
- Ochuba Final PDFDocumento13 pagineOchuba Final PDFOchubaNessuna valutazione finora
- Tracking With The Kinematics of Extremal Contours: 1 Introduction and BackgroundDocumento10 pagineTracking With The Kinematics of Extremal Contours: 1 Introduction and BackgroundCyrille LamasséNessuna valutazione finora
- Constructing NARMAX Models Using ARMAXDocumento32 pagineConstructing NARMAX Models Using ARMAXAkustika HorozNessuna valutazione finora
- Modal Analysis For Random Vibration of Hysteretic FramesDocumento19 pagineModal Analysis For Random Vibration of Hysteretic Framesutsav_koshtiNessuna valutazione finora
- Trinkle Rolling Contacts 00614264Documento6 pagineTrinkle Rolling Contacts 00614264sandhyaNessuna valutazione finora
- 2te Bereicht EntwurfDocumento15 pagine2te Bereicht EntwurfmandbackNessuna valutazione finora
- 1974 Fast One-Dimensional Digital Convolution by Multidimensional TechniquesDocumento10 pagine1974 Fast One-Dimensional Digital Convolution by Multidimensional TechniquesRajesh BathijaNessuna valutazione finora
- Definition of TermsDocumento6 pagineDefinition of TermsAnonymous 6W45ij5N3pNessuna valutazione finora
- Criminal Procedure Memory Aid ADocumento20 pagineCriminal Procedure Memory Aid ACarl Daniel BolislisNessuna valutazione finora
- Ateneo 2007 Criminal Law (Book 2) Part 2Documento51 pagineAteneo 2007 Criminal Law (Book 2) Part 2Carl Daniel BolislisNessuna valutazione finora
- Criminal Procedure 1 WeeblyDocumento13 pagineCriminal Procedure 1 WeeblyChristopher PjunatasNessuna valutazione finora
- Law - Definition of Terms - Criminal Law Book 2 ReviewerDocumento7 pagineLaw - Definition of Terms - Criminal Law Book 2 ReviewerNardz Andanan88% (8)
- Criminal Procedure Memory AidDocumento25 pagineCriminal Procedure Memory AidCarl Daniel BolislisNessuna valutazione finora
- UP Crim Law Reviwer 2013Documento258 pagineUP Crim Law Reviwer 2013Chase DaclanNessuna valutazione finora
- Ateneo 2007 Criminal Law (Book 2) Part 1 PDFDocumento62 pagineAteneo 2007 Criminal Law (Book 2) Part 1 PDFmhaehh0624Nessuna valutazione finora
- University of The Cordilleras Practicum 1&2 Criminal Sociology, Ethics & Human RelationsDocumento13 pagineUniversity of The Cordilleras Practicum 1&2 Criminal Sociology, Ethics & Human RelationsCarl Daniel BolislisNessuna valutazione finora
- Code of Conduct - LE OfficialsDocumento113 pagineCode of Conduct - LE OfficialsCarl Daniel BolislisNessuna valutazione finora
- Ateneo 2007 Criminal Law (Book 1) PDFDocumento63 pagineAteneo 2007 Criminal Law (Book 1) PDFmhaehh0624100% (3)
- Criminal Investigation ManualDocumento500 pagineCriminal Investigation Manuallegalatwork100% (1)
- Legal Medicine by Pedro SolisDocumento792 pagineLegal Medicine by Pedro SolisNLainie Omar100% (3)
- Final EditedDocumento2 pagineFinal EditedCarl Daniel BolislisNessuna valutazione finora
- CSI Form 1 First Responder's FormDocumento3 pagineCSI Form 1 First Responder's FormAganon Edd Ranger100% (1)
- Crim 1Documento18 pagineCrim 1Carl Daniel BolislisNessuna valutazione finora
- (N) Drug Education and Vice ControlDocumento13 pagine(N) Drug Education and Vice ControlCarl Daniel BolislisNessuna valutazione finora
- (N) Crime Scene Investigation and Evidence Collection LectureDocumento25 pagine(N) Crime Scene Investigation and Evidence Collection LectureCarl Daniel BolislisNessuna valutazione finora
- Principles of Handwriting Development: Children's Occupational TherapyDocumento9 paginePrinciples of Handwriting Development: Children's Occupational TherapyCarl Daniel BolislisNessuna valutazione finora
- IRR of RA 9165 - Otherwise Known As The Comprehensive Dangerous Drug Act of 2002Documento60 pagineIRR of RA 9165 - Otherwise Known As The Comprehensive Dangerous Drug Act of 2002Pacific SpectrumNessuna valutazione finora
- Rules On Electronic EvidenceDocumento1 paginaRules On Electronic EvidenceHadassah Joy EginoNessuna valutazione finora
- Preliminary ProcedureDocumento1 paginaPreliminary ProcedureCarl Daniel BolislisNessuna valutazione finora
- (F) CSI Form 2 Request For The Conduct of SOCODocumento1 pagina(F) CSI Form 2 Request For The Conduct of SOCOCarl Daniel BolislisNessuna valutazione finora
- An Oscillation Theory of HandwritingDocumento1 paginaAn Oscillation Theory of HandwritingCarl Daniel BolislisNessuna valutazione finora
- Crim 5 ReportDocumento88 pagineCrim 5 ReportCarl Daniel BolislisNessuna valutazione finora
- Andre2014 PDFDocumento16 pagineAndre2014 PDFCarl Daniel BolislisNessuna valutazione finora
- Defense 1.1 1Documento4 pagineDefense 1.1 1Carl Daniel BolislisNessuna valutazione finora
- Preliminary ProcedureDocumento1 paginaPreliminary ProcedureCarl Daniel BolislisNessuna valutazione finora
- Allen Michael ThesisDocumento352 pagineAllen Michael ThesisCarl Daniel BolislisNessuna valutazione finora
- Time Value of Money LectureDocumento54 pagineTime Value of Money LectureRanin, Manilac Melissa SNessuna valutazione finora
- Me8072 Renewable Sources of EnergyDocumento13 pagineMe8072 Renewable Sources of EnergyNallappan Rajj ANessuna valutazione finora
- LPG GasDocumento39 pagineLPG Gasv prasanthNessuna valutazione finora
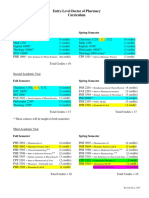
- Pharmd CurriculumDocumento18 paginePharmd Curriculum5377773Nessuna valutazione finora
- Food Biotechnology in Ethical PerspectiveDocumento340 pagineFood Biotechnology in Ethical Perspectivemojtaba2500100% (2)
- Academic Reading: All Answers Must Be Written On The Answer SheetDocumento21 pagineAcademic Reading: All Answers Must Be Written On The Answer SheetLemon MahamudNessuna valutazione finora
- Easergy PS100 48VDC Power SupplyDocumento2 pagineEasergy PS100 48VDC Power SupplyRichard SyNessuna valutazione finora
- MATLAB Fundamentals Quick ReferenceDocumento43 pagineMATLAB Fundamentals Quick ReferenceCarlos Manuel Cardoza EspitiaNessuna valutazione finora
- UC Lennox Serie 13 Acx Merit R-410aDocumento52 pagineUC Lennox Serie 13 Acx Merit R-410ajmurcia80Nessuna valutazione finora
- Earth Sciences Notes Csir-Ugc Net JRFDocumento57 pagineEarth Sciences Notes Csir-Ugc Net JRFmanas773Nessuna valutazione finora
- Imbinari Teava Fibra de Sticla PDFDocumento1 paginaImbinari Teava Fibra de Sticla PDFplex015Nessuna valutazione finora
- Opex and CapexDocumento5 pagineOpex and CapexATM Shafiq Ul AlamNessuna valutazione finora
- Lc420euf Sda1 LGDocumento41 pagineLc420euf Sda1 LGjavierNessuna valutazione finora
- Sheet Metal Manufacturing Companies NoidaDocumento9 pagineSheet Metal Manufacturing Companies NoidaAmanda HoldenNessuna valutazione finora
- Ni Elvis ManualDocumento98 pagineNi Elvis ManualZhi YiNessuna valutazione finora
- 4 5803133100506483687Documento245 pagine4 5803133100506483687Malik HamidNessuna valutazione finora
- Resumen C37 010 Aplicacion de Breaker Disenados IC Simetrica PDFDocumento9 pagineResumen C37 010 Aplicacion de Breaker Disenados IC Simetrica PDFglendathais100% (1)
- Chapter 10 - The Mature ErythrocyteDocumento55 pagineChapter 10 - The Mature ErythrocyteSultan AlexandruNessuna valutazione finora
- Mpfic54 PDFDocumento201 pagineMpfic54 PDFAmy100% (1)
- Pre RmoDocumento4 paginePre RmoSangeeta Mishra100% (1)
- Southwest Airlines Final ReportDocumento16 pagineSouthwest Airlines Final Reportapi-427311067Nessuna valutazione finora
- Hot Topic 02 Good Light Magazine 56smDocumento24 pagineHot Topic 02 Good Light Magazine 56smForos IscNessuna valutazione finora
- Chemical Bonds WorksheetDocumento2 pagineChemical Bonds WorksheetJewel Mae MercadoNessuna valutazione finora
- Design Documentation ChecklistDocumento8 pagineDesign Documentation ChecklistGlenn Stanton100% (1)
- Pineapple in JohorDocumento6 paginePineapple in JohorHaiqal AzizNessuna valutazione finora
- Comparative Performance of Some Cattle Breeds Under Barani Conditions of PakistanDocumento4 pagineComparative Performance of Some Cattle Breeds Under Barani Conditions of PakistanMasood HassanNessuna valutazione finora
- Differential Geometry of Curves and Surfaces 3. Regular SurfacesDocumento16 pagineDifferential Geometry of Curves and Surfaces 3. Regular SurfacesyrodroNessuna valutazione finora
- HMT RM65 Radial DrillDocumento2 pagineHMT RM65 Radial Drillsomnath213Nessuna valutazione finora
- Of The Month Is Live. 100+ Subjects. Participate Now!: Sanfoundry Certification ContestDocumento4 pagineOf The Month Is Live. 100+ Subjects. Participate Now!: Sanfoundry Certification ContestBaydaa QaidyNessuna valutazione finora
- (G. Lakshmi Narasaiah) Finite Element Analysis PDFDocumento349 pagine(G. Lakshmi Narasaiah) Finite Element Analysis PDFmoljaime1326Nessuna valutazione finora